PicoBorg — руководство по базовой настройке моторов
Введение
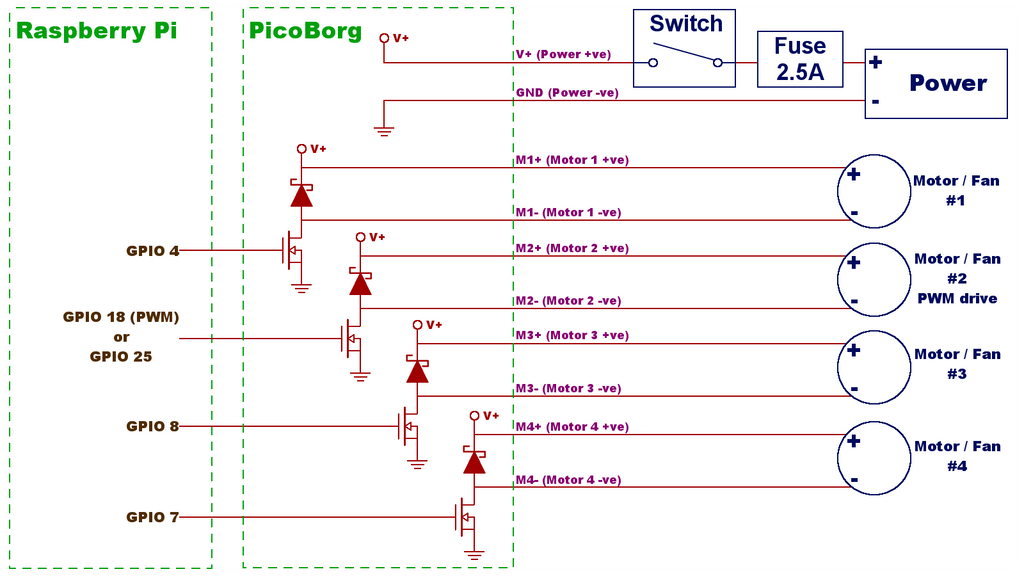
PicoBorg — это ультракомпактный контроллер моторов для Raspberry Pi. С помощью PicoBorg вы можете включать и выключать вентиляторы, моторы, соленоиды или реле прямо с вашего Raspberry Pi. Плата имеет 4 низкоуровневых драйвера, поэтому вы можете включать и выключать 4 устройства, а одно устройство подключено к выводу RPi PWM, что позволяет регулировать скорость этого мотора! Управление моторами осуществляется через простой графический интерфейс (GUI), который можно установить, следуя инструкциям по установке PicoBorg. Питание моторов подаётся не напрямую от Raspberry Pi, поэтому нет риска, что ваш Pi выключится. Вместо этого PicoBorg использует батарейный блок для питания моторов, а значит, вы не ограничены моторами на 5 В — фактически вы можете управлять ЛЮБЫМИ моторами до 20 В!
Это руководство даст вам краткое введение в установку и использование PicoBorg, а также покажет на примере с 3V DC мотором и колесом, как управлять мотором!
Что вам понадобится!
Первый шаг — убедитесь, что у вас есть всё необходимое!
Raspberry Pi и базовые периферийные устройства, включая экран, клавиатуру, блок питания и т.д.
Подключение к интернету через LAN для загрузки программного обеспечения
Базовый паяльник и припой
Провода
Мотор. PicoBorg может управлять моторами до 20 В (рекомендуется 12 В) или 2,5 А
Батарейный блок — с необходимым количеством батареек для вашего мотора. Например, 3 В = 2 x AA!
Шаг 1 — Пайка!
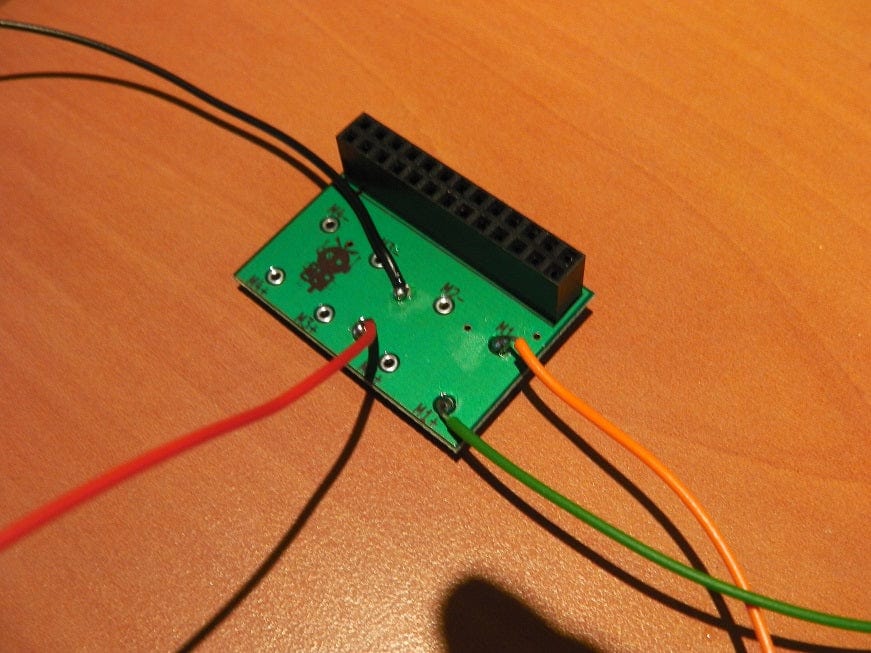
Этот проект — начало создания ровера, поэтому, поскольку данная конструкция, вероятно, будет частью более крупного движущегося устройства, я выбрал гибкий 7-жильный провод. Это позволит проводу немного двигаться, вместо того чтобы создавать нагрузку на паяное соединение. Также убедитесь, что вы паяете с правильной стороны — это сторона БЕЗ компонентов на PicoBorg.
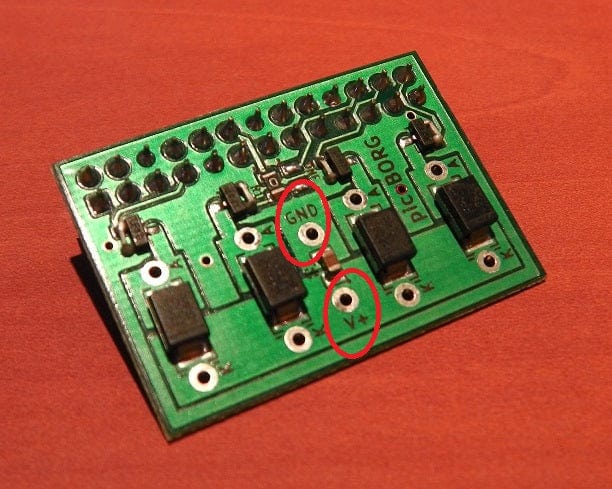
PicoBorg позволяет запитывать мотор от внешнего источника, поэтому сначала нам нужно припаять провода для батарейного блока. Нам нужно припаять два провода: один для «плюса» на контакт V+, и один для «минуса» на контакт GND. Оба контакта подписаны на PicoBorg.
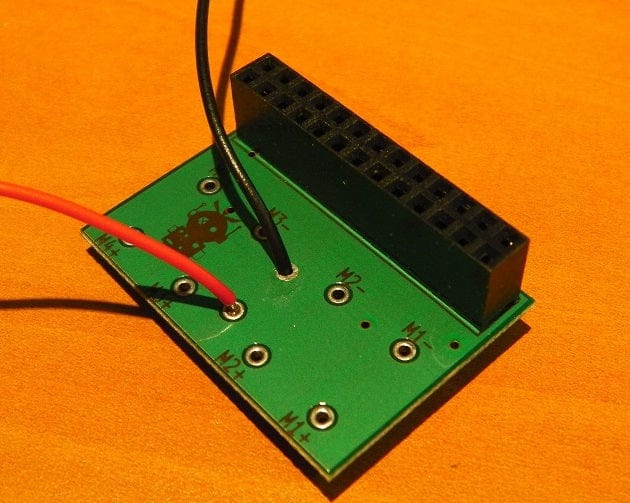
Далее нам нужно припаять провода управления мотором. В этом примере мы используем только один мотор, поэтому я добавлю кабели к M1- и M1+ (оранжевый и зелёный).
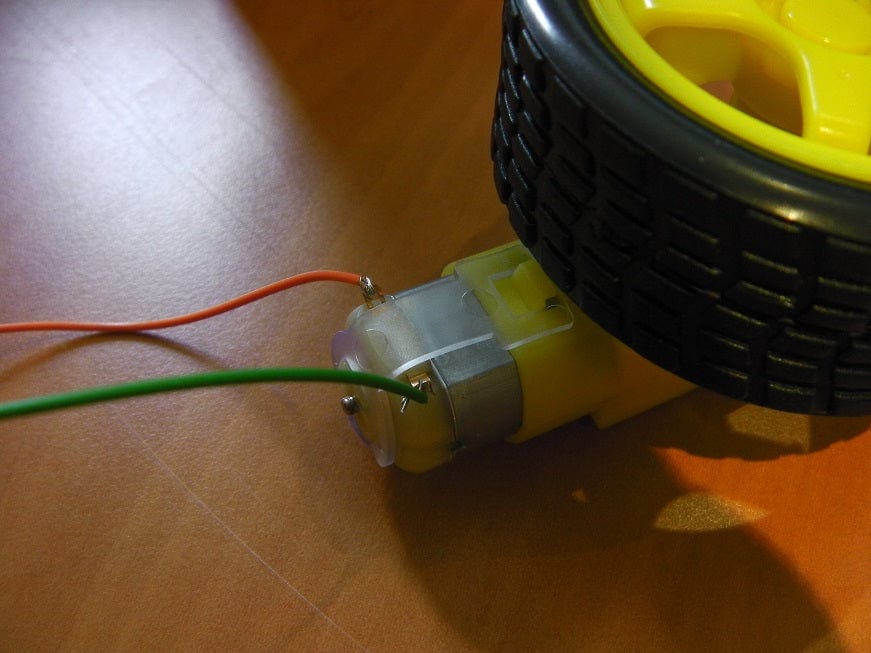
Затем всё, что нужно сделать — подключить провода M1- и M1+ к мотору. У большинства маленьких моторов есть два контакта, например, мотор в этом примере имеет два медных контакта. Просто подключите провода M1- и M1+ к этим контактам, и всё готово — если вы хотите более надёжное соединение, можете их припаять. Обратите внимание, что полярность влияет на направление вращения мотора!
Оставьте контакты батареи на PicoBorg неподключёнными пока — вам нужно подключить их ПОСЛЕ включения питания Pi.
Шаг 2 — Установка программного обеспечения
Убедитесь, что у вас установлена последняя версия Raspbian, имеется хорошее подключение к интернету через LAN и система обновлена! Затем выполните следующие команды… . .
mkdir ~/picoborg
(создаёт каталог для хранения всего программного обеспечения PicoBorg)
cd ~/picoborg
(переходим в каталог, чтобы загрузить ПО в нужное место)
wget http://www.piborg.org/downloads/picoborg/examples.zip
(загружаем программное обеспечение)
unzip examples.zip
(распаковываем программное обеспечение)
chmod +x install.sh
(изменяем права доступа файла для запуска его как исполняемого)
./install.sh
(запускаем файл установки)
После завершения установки программное обеспечение будет установлено! Просто запустите графический интерфейс командой startx, и на рабочем столе появится дополнительный значок «PicoBorg Demo GUI»!
Приступим к работе с моторами!
Шаг 3 — Подключение!
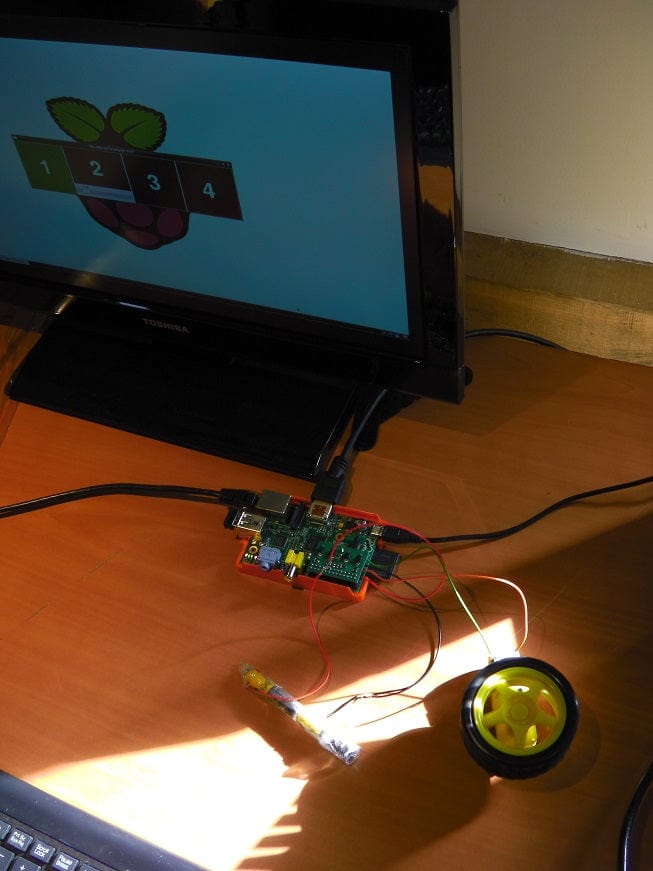
Убедитесь, что ваш Raspberry Pi выключен. Подключите PicoBorg к Pi и убедитесь, что мотор подключён к PicoBorg. Батарею пока не подключайте.

Включите Pi и загрузите графический интерфейс:
startx
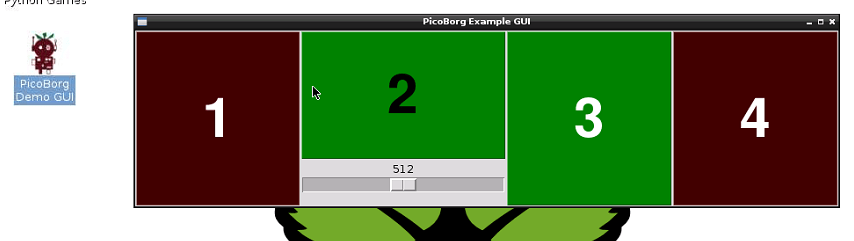
Запустите значок «PicoBorg Demo GUI» на рабочем столе, и откроется графический интерфейс управления моторами.
Подключите питание к контактам V+ и GND (красный и чёрный провода) к батарейному блоку (или примотанным изолентой батарейкам).
Нажмите на красный квадрат с номером 1 в интерфейсе управления моторами — он станет зелёным, и ваш мотор должен начать вращаться!
Вот и всё! Это лишь один пример, и есть ещё множество моторов, с которыми можно поэкспериментировать :D
Если вы хотите управлять скоростью мотора (а не просто включать/выключать его), подключите мотор к контактам M2- и M2+, после чего сможете регулировать скорость с помощью ползунка.