Raspberry Pi Pico: ультразвуковой датчик HC-SR04 (MicroPython)
Узнайте, как использовать ультразвуковой датчик HC-SR04 с Raspberry Pi Pico для измерения расстояния до объекта с помощью прошивки MicroPython. В этом руководстве описано, как подключить датчик к плате, и приведён простой скрипт MicroPython для измерения расстояния до объекта и отображения его на OLED-дисплее.
В этом руководстве мы рассмотрим следующие темы:
Предварительные требования – прошивка MicroPython
Для выполнения этого руководства на вашей плате Raspberry Pi Pico должна быть установлена прошивка MicroPython. Вам также потребуется IDE для написания и загрузки кода на плату.
Рекомендуемая IDE для MicroPython на Raspberry Pi Pico – Thonny IDE. Следуйте следующему руководству, чтобы узнать, как установить Thonny IDE, прошить прошивку MicroPython и загрузить код на плату.
Если вы только начинаете работу с Raspberry Pi Pico, следуйте одному из следующих руководств по началу работы:
Знакомство с ультразвуковым датчиком HC-SR04
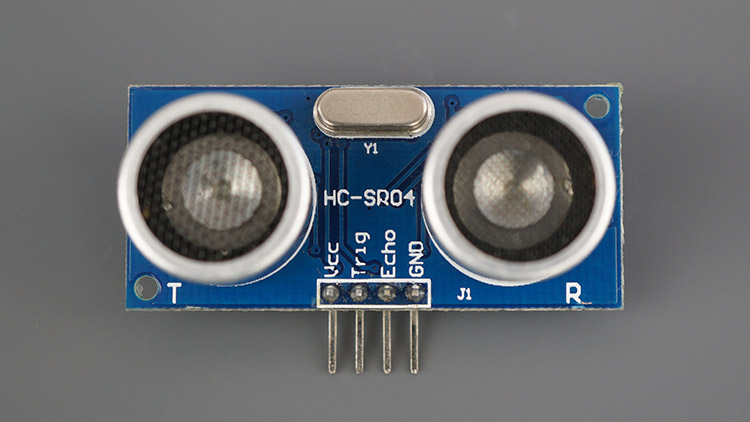
Ультразвуковой датчик HC-SR04 использует сонар для определения расстояния до объекта. Этот датчик измеряет расстояние от 2 см до 400 см (от 0,8 дюйма до 157 дюймов) с точностью 0,3 см (0,1 дюйма), что подходит для большинства любительских проектов. Кроме того, этот конкретный модуль поставляется с ультразвуковым передатчиком и приёмником.
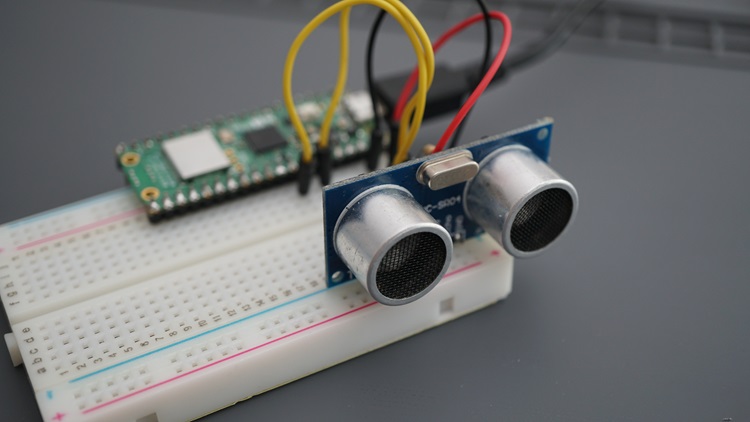
На следующем изображении показан ультразвуковой датчик HC-SR04.
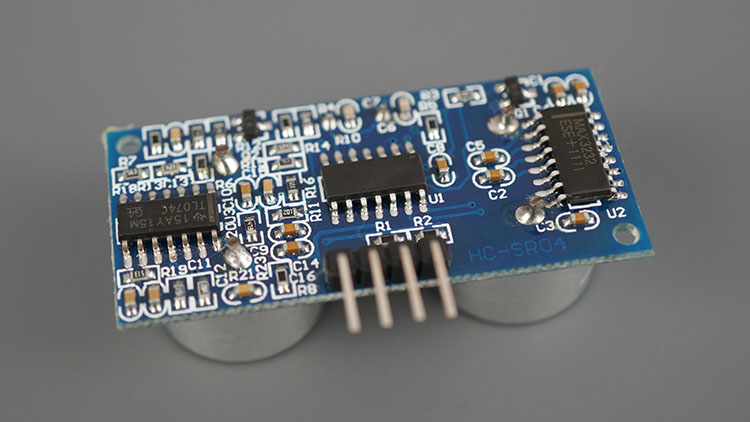
На следующем изображении показана другая сторона датчика.
Хотите альтернативу ультразвуковому датчику HC-SR04? Обратите внимание на радарный датчик приближения RCWL-0516:
Технические характеристики ультразвукового датчика HC-SR04
В следующей таблице приведены основные характеристики и спецификации ультразвукового датчика HC-SR04. Для получения дополнительной информации обратитесь к даташиту датчика.
Напряжение питания |
5 В постоянного тока |
Рабочий ток |
15 мА |
Рабочая частота |
40 кГц |
Максимальная дальность |
4 метра |
Минимальная дальность |
2 см |
Угол измерения |
15° |
Разрешение |
0,3 см |
Входной сигнал триггера |
TTL-импульс 10 мкс |
Выходной сигнал эхо |
TTL-импульс, пропорциональный дальности |
Размеры |
45 мм x 20 мм x 15 мм |
Распиновка ультразвукового датчика HC-SR04
Ниже приведена распиновка ультразвукового датчика HC-SR04.
VCC |
Питание датчика (5 В) |
Trig |
Вход триггера |
Echo |
Выход эхо |
GND |
Общий GND |
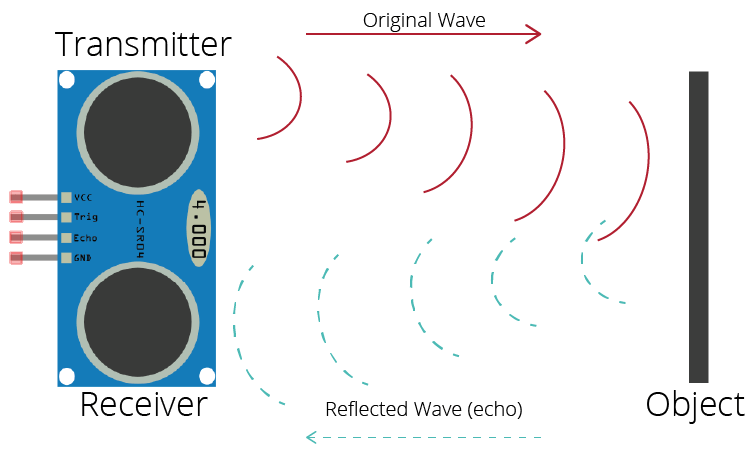
Как работает ультразвуковой датчик HC-SR04?
Ультразвуковой датчик использует сонар для определения расстояния до объекта. Вот как это работает:
Ультразвуковой передатчик (вывод trig) излучает высокочастотный звук (40 кГц).
Звук распространяется в воздухе. Если он встречает объект, то отражается обратно к модулю.
Ультразвуковой приёмник (вывод echo) принимает отражённый звук (эхо).
Учитывая скорость звука в воздухе и время прохождения (время, прошедшее с момента передачи и приёма сигнала), мы можем рассчитать расстояние до объекта. Вот формула:
расстояние до объекта = ((скорость звука в воздухе) * время) / 2
скорость звука в воздухе при 20°C (68°F) = 343 м/с
Необходимые компоненты
Для выполнения этого руководства вам потребуются следующие компоненты:
Ультразвуковой датчик HC-SR04
Raspberry Pi Pico (любая модель)
Резистор 1 кОм
Макетная плата
Соединительные провода
RPi Pico с ультразвуковым датчиком HC-SR04 – схема подключения
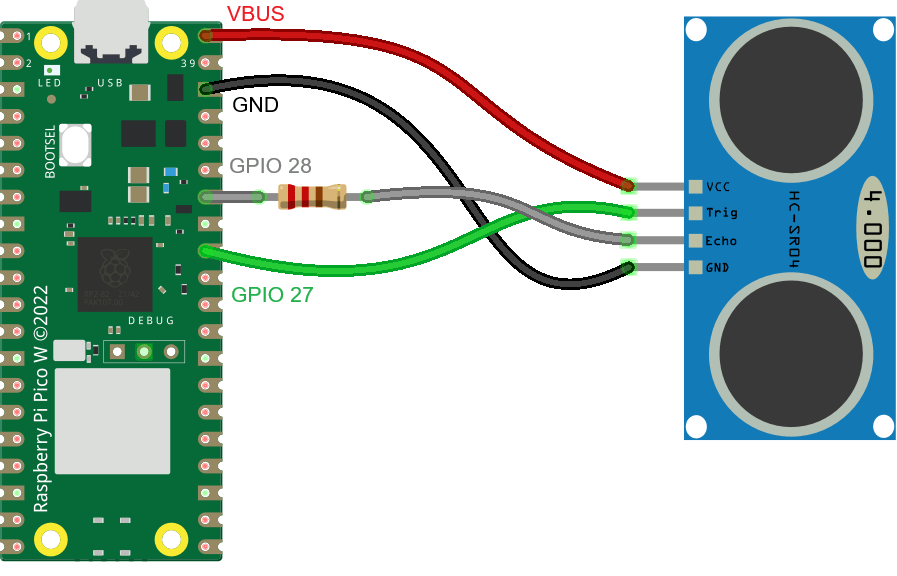
Подключите ультразвуковой датчик HC-SR04 к плате RPi Pico, как показано на следующей схеме. Мы подключаем вывод Trig к GPIO 27, а вывод Echo к GPIO 28, но вы можете использовать любые другие подходящие выводы.
Ультразвуковой датчик |
RPi Pico |
|---|---|
VCC |
VBus (5 В) |
Trig |
GPIO 27 |
Echo |
GPIO 28 последовательно с резистором 1 кОм |
GND |
GND |
Библиотека HC-SR04 для MicroPython
Существует несколько способов получить расстояние до объекта с помощью HC-SR04 и платы RPi Pico на прошивке MicroPython. Мы будем использовать библиотеку HC-SR04 для MicroPython, которая упрощает работу с датчиком и получение измерений.
Библиотека, которую мы будем использовать, не входит в стандартную библиотеку MicroPython по умолчанию. Поэтому вам необходимо загрузить следующую библиотеку на плату RPi Pico (сохраните её с именем hcsr04.py).
import machine, time
from machine import Pin
__version__ = '0.2.0'
__author__ = 'Roberto Sánchez'
__license__ = "Apache License 2.0. https://www.apache.org/licenses/LICENSE-2.0"
class HCSR04:
"""
Driver to use the untrasonic sensor HC-SR04.
The sensor range is between 2cm and 4m.
The timeouts received listening to echo pin are converted to OSError('Out of range')
"""
# echo_timeout_us is based in chip range limit (400cm)
def __init__(self, trigger_pin, echo_pin, echo_timeout_us=500*2*30):
"""
trigger_pin: Output pin to send pulses
echo_pin: Readonly pin to measure the distance. The pin should be protected with 1k resistor
echo_timeout_us: Timeout in microseconds to listen to echo pin.
By default is based in sensor limit range (4m)
"""
self.echo_timeout_us = echo_timeout_us
# Init trigger pin (out)
self.trigger = Pin(trigger_pin, mode=Pin.OUT, pull=None)
self.trigger.value(0)
# Init echo pin (in)
self.echo = Pin(echo_pin, mode=Pin.IN, pull=None)
def _send_pulse_and_wait(self):
"""
Send the pulse to trigger and listen on echo pin.
We use the method `machine.time_pulse_us()` to get the microseconds until the echo is received.
"""
self.trigger.value(0) # Stabilize the sensor
time.sleep_us(5)
self.trigger.value(1)
# Send a 10us pulse.
time.sleep_us(10)
self.trigger.value(0)
try:
pulse_time = machine.time_pulse_us(self.echo, 1, self.echo_timeout_us)
return pulse_time
except OSError as ex:
if ex.args[0] == 110: # 110 = ETIMEDOUT
raise OSError('Out of range')
raise ex
def distance_mm(self):
"""
Get the distance in milimeters without floating point operations.
"""
pulse_time = self._send_pulse_and_wait()
# To calculate the distance we get the pulse_time and divide it by 2
# (the pulse walk the distance twice) and by 29.1 becasue
# the sound speed on air (343.2 m/s), that It's equivalent to
# 0.34320 mm/us that is 1mm each 2.91us
# pulse_time // 2 // 2.91 -> pulse_time // 5.82 -> pulse_time * 100 // 582
mm = pulse_time * 100 // 582
return mm
def distance_cm(self):
"""
Get the distance in centimeters with floating point operations.
It returns a float
"""
pulse_time = self._send_pulse_and_wait()
# To calculate the distance we get the pulse_time and divide it by 2
# (the pulse walk the distance twice) and by 29.1 becasue
# the sound speed on air (343.2 m/s), that It's equivalent to
# 0.034320 cm/us that is 1cm each 29.1us
cms = (pulse_time / 2) / 29.1
return cms
Загрузка модуля HC-SR04 на RPi Pico
Выполните следующие шаги, чтобы загрузить файл hcsr04.py на вашу плату.
1. Скопируйте код библиотеки в новый файл. Код библиотеки HC-SR04 можно найти здесь.
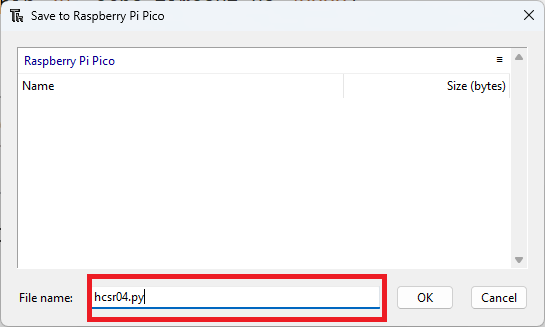
2. Перейдите в File > Save as…
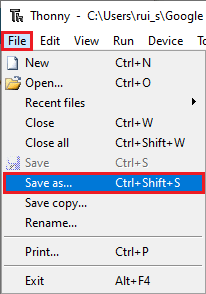
3. Выберите сохранение на «Raspberry Pi Pico»:
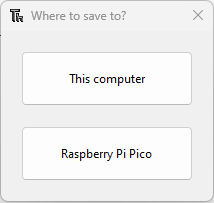
4. Назовите файл hcsr04.py и нажмите кнопку OK:
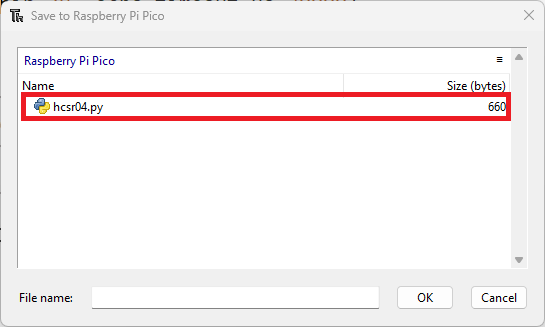
Вот и всё. Библиотека загружена на вашу плату. Чтобы убедиться, что она успешно загружена, перейдите в File > Save as… и выберите устройство Raspberry Pi Pico. Ваш файл должен быть в списке:
После загрузки библиотеки на плату вы можете использовать функции библиотеки в своём коде, импортировав её.
Код – ультразвуковой датчик HC-SR04 с RPi Pico
После загрузки библиотеки на плату RPi Pico скопируйте следующий код в Thonny IDE. Он просто выводит расстояние до ближайшего объекта каждую секунду (пример адаптирован со страницы библиотеки).
from machine import Pin
import time
from hcsr04 import HCSR04
# Initialize the HC-SR04 sensor with trigger on GPIO 27 and echo on GPIO 28
sensor = HCSR04(trigger_pin=27, echo_pin=28, echo_timeout_us=30000)
while True:
try:
# Measure distance in centimeters
#distance_cm = sensor.distance_cm()
# Convert distance from centimeters to inches
#distance_inch = distance_cm * 0.393701
#print('Distance: {:.2f} cm'.format(distance_cm))
# Measure distance in millimeters
distance_mm = sensor.distance_mm()
print('Distance: {} mm'.format(distance_mm))
except OSError as e:
print('Error:', e)
# Wait 1 second before the next measurement
time.sleep(1)
Как работает код
Сначала необходимо импортировать нужные библиотеки: импортируйте класс HCSR04 из библиотеки hcsr04. Кроме того, нужно импортировать библиотеку time для добавления задержек в код.
from hcsr04 import HCSR04
from time import sleep
Затем создайте объект HCSR04 с именем sensor, который ссылается на датчик HCSR04. Передайте в качестве аргументов вывод триггера, вывод эхо и таймаут (максимальное время прохождения звуковой волны – когда датчик, вероятно, находится вне диапазона).
sensor = HCSR04(trigger_pin=27, echo_pin=28, echo_timeout_us=30000)
Чтобы получить расстояние в сантиметрах, достаточно вызвать метод distance_cm объекта sensor. Сохраните результат в переменной distance_cm.
distance_cm = sensor.distance_cm()
Библиотека также предоставляет метод для получения расстояния в миллиметрах без операций с плавающей запятой. Достаточно вызвать:
distance_mm = sensor.distance_mm()
Выведите расстояние в оболочке MicroPython.
print('Distance: {} mm'.format(distance_mm))
В конце мы добавляем задержку в одну секунду (расстояние обновляется каждую секунду):
sleep(1)
Мы получаем расстояние внутри операторов try и except, чтобы код не зависал при возникновении ошибки.
try:
# Measure distance in centimeters
#distance_cm = sensor.distance_cm()
#print('Distance: {:.2f} cm'.format(distance_cm))
# Measure distance in millimeters
distance_mm = sensor.distance_mm()
print('Distance: {} mm'.format(distance_mm))
except OSError as e:
print('Error:', e)
Демонстрация
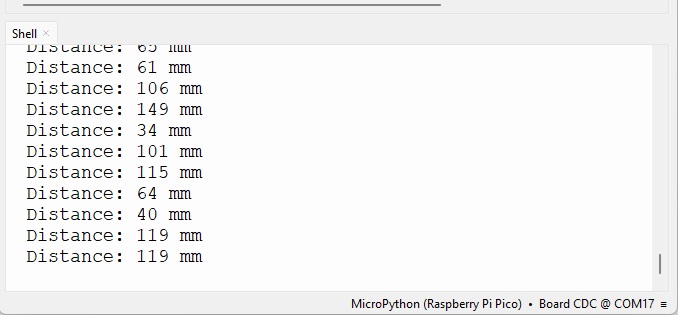
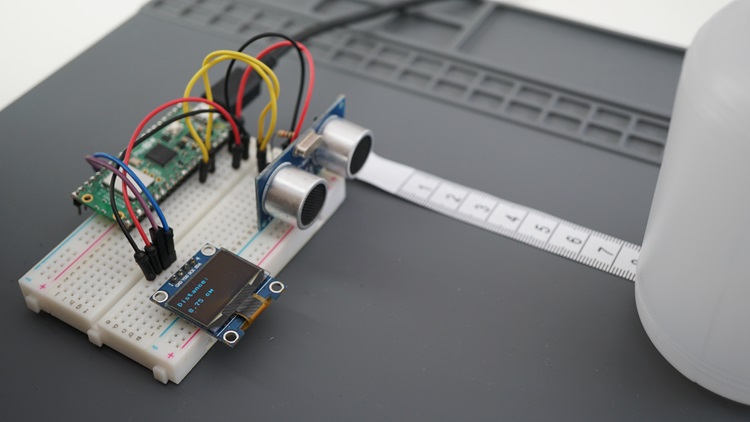
После загрузки кода на плату нажмите кнопку RST, чтобы запустить код.
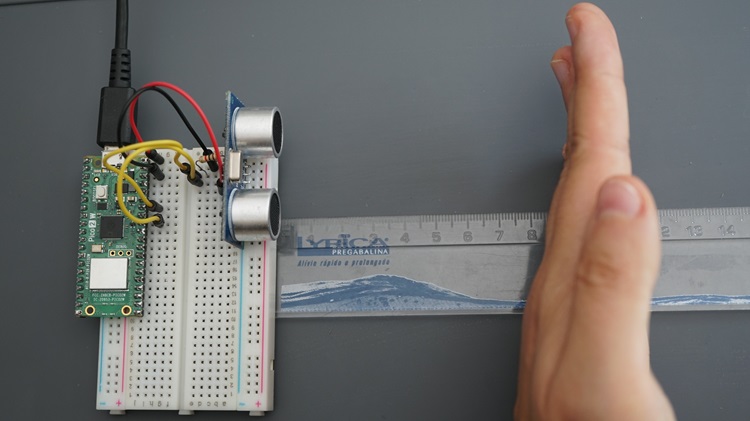
Расстояние до ближайшего объекта должно отображаться в оболочке.
Отображение расстояния (HCSR04) на OLED-дисплее
Теперь, когда вы знаете, как получить расстояние до ближайшего объекта с помощью ультразвукового датчика HC-SR04, мы отобразим показания датчика на OLED-дисплее.
Необходимые компоненты
Вот список компонентов, необходимых для выполнения этого примера:
Ультразвуковой датчик HC-SR04
Raspberry Pi Pico (любая модель)
Резистор 1 кОм
OLED-дисплей 0,96 дюйма I2C SSD1306
Макетная плата
Соединительные провода
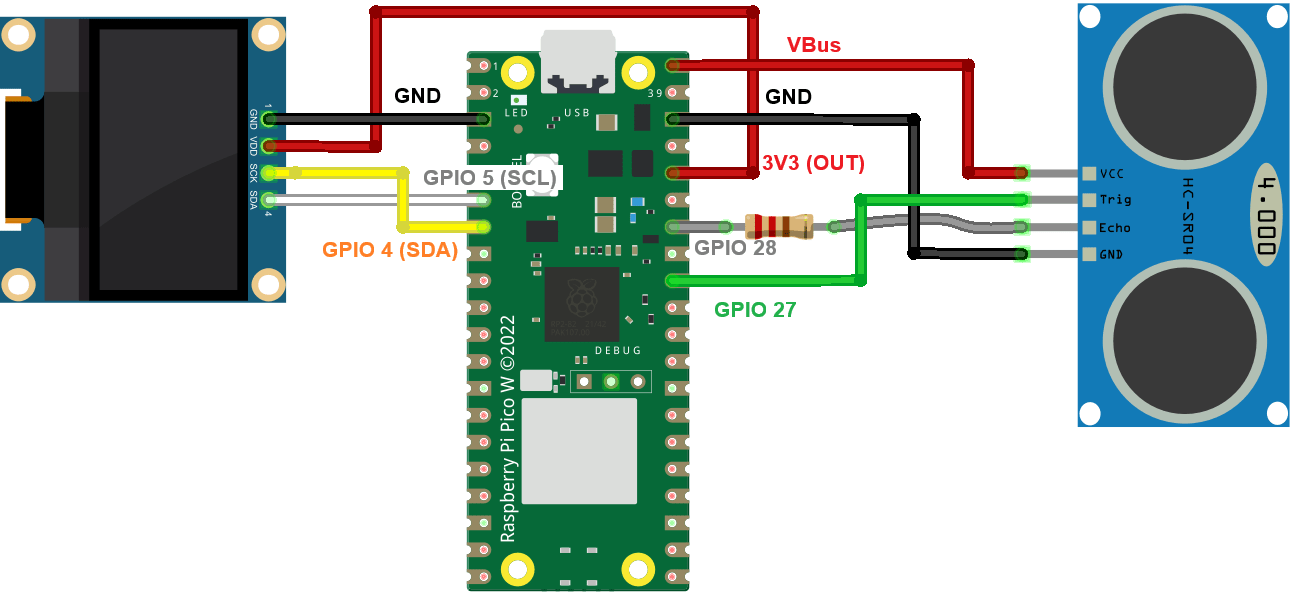
Схема подключения
Добавьте OLED-дисплей I2C к предыдущей схеме. Мы подключаем SDA к GPIO 4, а SCL к GPIO 5. Вы можете следовать следующей схеме:
Файлы
Для этого примера вам потребуются три файла:
hcsr04.py: этот файл содержит все методы для работы с датчиком HC-SR04. Это файл, который вы загрузили ранее.
ssd1306.py: это библиотека для OLED-дисплея SSD1306 I2C. Вы должны загрузить его на плату, чтобы иметь возможность взаимодействовать с дисплеем и выводить на него информацию.
main.py: это основной скрипт для получения расстояния и отображения его на OLED-дисплее. Вы должны назвать его main.py и загрузить на плату. Когда вы загружаете код с именем main.py в файловую систему RPi Pico, этот файл автоматически запускается при старте RPi Pico.
ssd1306.py
Создайте новый файл в Thonny IDE с именем ssd1306.py и скопируйте следующий код. Затем загрузите его на плату (File > Save as… > MicroPython device и назовите его ssd1306.py).
# MicroPython SSD1306 OLED driver, I2C and SPI interfaces created by Adafruit
import time
import framebuf
# register definitions
SET_CONTRAST = const(0x81)
SET_ENTIRE_ON = const(0xa4)
SET_NORM_INV = const(0xa6)
SET_DISP = const(0xae)
SET_MEM_ADDR = const(0x20)
SET_COL_ADDR = const(0x21)
SET_PAGE_ADDR = const(0x22)
SET_DISP_START_LINE = const(0x40)
SET_SEG_REMAP = const(0xa0)
SET_MUX_RATIO = const(0xa8)
SET_COM_OUT_DIR = const(0xc0)
SET_DISP_OFFSET = const(0xd3)
SET_COM_PIN_CFG = const(0xda)
SET_DISP_CLK_DIV = const(0xd5)
SET_PRECHARGE = const(0xd9)
SET_VCOM_DESEL = const(0xdb)
SET_CHARGE_PUMP = const(0x8d)
class SSD1306:
def __init__(self, width, height, external_vcc):
self.width = width
self.height = height
self.external_vcc = external_vcc
self.pages = self.height // 8
# Note the subclass must initialize self.framebuf to a framebuffer.
# This is necessary because the underlying data buffer is different
# between I2C and SPI implementations (I2C needs an extra byte).
self.poweron()
self.init_display()
def init_display(self):
for cmd in (
SET_DISP | 0x00, # off
# address setting
SET_MEM_ADDR, 0x00, # horizontal
# resolution and layout
SET_DISP_START_LINE | 0x00,
SET_SEG_REMAP | 0x01, # column addr 127 mapped to SEG0
SET_MUX_RATIO, self.height - 1,
SET_COM_OUT_DIR | 0x08, # scan from COM[N] to COM0
SET_DISP_OFFSET, 0x00,
SET_COM_PIN_CFG, 0x02 if self.height == 32 else 0x12,
# timing and driving scheme
SET_DISP_CLK_DIV, 0x80,
SET_PRECHARGE, 0x22 if self.external_vcc else 0xf1,
SET_VCOM_DESEL, 0x30, # 0.83*Vcc
# display
SET_CONTRAST, 0xff, # maximum
SET_ENTIRE_ON, # output follows RAM contents
SET_NORM_INV, # not inverted
# charge pump
SET_CHARGE_PUMP, 0x10 if self.external_vcc else 0x14,
SET_DISP | 0x01): # on
self.write_cmd(cmd)
self.fill(0)
self.show()
def poweroff(self):
self.write_cmd(SET_DISP | 0x00)
def contrast(self, contrast):
self.write_cmd(SET_CONTRAST)
self.write_cmd(contrast)
def invert(self, invert):
self.write_cmd(SET_NORM_INV | (invert & 1))
def show(self):
x0 = 0
x1 = self.width - 1
if self.width == 64:
# displays with width of 64 pixels are shifted by 32
x0 += 32
x1 += 32
self.write_cmd(SET_COL_ADDR)
self.write_cmd(x0)
self.write_cmd(x1)
self.write_cmd(SET_PAGE_ADDR)
self.write_cmd(0)
self.write_cmd(self.pages - 1)
self.write_framebuf()
def fill(self, col):
self.framebuf.fill(col)
def pixel(self, x, y, col):
self.framebuf.pixel(x, y, col)
def scroll(self, dx, dy):
self.framebuf.scroll(dx, dy)
def text(self, string, x, y, col=1):
self.framebuf.text(string, x, y, col)
class SSD1306_I2C(SSD1306):
def __init__(self, width, height, i2c, addr=0x3c, external_vcc=False):
self.i2c = i2c
self.addr = addr
self.temp = bytearray(2)
# Add an extra byte to the data buffer to hold an I2C data/command byte
# to use hardware-compatible I2C transactions. A memoryview of the
# buffer is used to mask this byte from the framebuffer operations
# (without a major memory hit as memoryview doesn't copy to a separate
# buffer).
self.buffer = bytearray(((height // 8) * width) + 1)
self.buffer[0] = 0x40 # Set first byte of data buffer to Co=0, D/C=1
self.framebuf = framebuf.FrameBuffer1(memoryview(self.buffer)[1:], width, height)
super().__init__(width, height, external_vcc)
def write_cmd(self, cmd):
self.temp[0] = 0x80 # Co=1, D/C#=0
self.temp[1] = cmd
self.i2c.writeto(self.addr, self.temp)
def write_framebuf(self):
# Blast out the frame buffer using a single I2C transaction to support
# hardware I2C interfaces.
self.i2c.writeto(self.addr, self.buffer)
def poweron(self):
pass
class SSD1306_SPI(SSD1306):
def __init__(self, width, height, spi, dc, res, cs, external_vcc=False):
self.rate = 10 * 1024 * 1024
dc.init(dc.OUT, value=0)
res.init(res.OUT, value=0)
cs.init(cs.OUT, value=1)
self.spi = spi
self.dc = dc
self.res = res
self.cs = cs
self.buffer = bytearray((height // 8) * width)
self.framebuf = framebuf.FrameBuffer1(self.buffer, width, height)
super().__init__(width, height, external_vcc)
def write_cmd(self, cmd):
self.spi.init(baudrate=self.rate, polarity=0, phase=0)
self.cs.high()
self.dc.low()
self.cs.low()
self.spi.write(bytearray([cmd]))
self.cs.high()
def write_framebuf(self):
self.spi.init(baudrate=self.rate, polarity=0, phase=0)
self.cs.high()
self.dc.high()
self.cs.low()
self.spi.write(self.buffer)
self.cs.high()
def poweron(self):
self.res.high()
time.sleep_ms(1)
self.res.low()
time.sleep_ms(10)
self.res.high()
hcsr04.py
Загрузите hcsr04.py на плату, если вы ещё этого не сделали (File > Save as… > MicroPython device и назовите его hcsr04.py).
import machine, time
from machine import Pin
__version__ = '0.2.0'
__author__ = 'Roberto Sánchez'
__license__ = "Apache License 2.0. https://www.apache.org/licenses/LICENSE-2.0"
class HCSR04:
"""
Driver to use the untrasonic sensor HC-SR04.
The sensor range is between 2cm and 4m.
The timeouts received listening to echo pin are converted to OSError('Out of range')
"""
# echo_timeout_us is based in chip range limit (400cm)
def __init__(self, trigger_pin, echo_pin, echo_timeout_us=500*2*30):
"""
trigger_pin: Output pin to send pulses
echo_pin: Readonly pin to measure the distance. The pin should be protected with 1k resistor
echo_timeout_us: Timeout in microseconds to listen to echo pin.
By default is based in sensor limit range (4m)
"""
self.echo_timeout_us = echo_timeout_us
# Init trigger pin (out)
self.trigger = Pin(trigger_pin, mode=Pin.OUT, pull=None)
self.trigger.value(0)
# Init echo pin (in)
self.echo = Pin(echo_pin, mode=Pin.IN, pull=None)
def _send_pulse_and_wait(self):
"""
Send the pulse to trigger and listen on echo pin.
We use the method `machine.time_pulse_us()` to get the microseconds until the echo is received.
"""
self.trigger.value(0) # Stabilize the sensor
time.sleep_us(5)
self.trigger.value(1)
# Send a 10us pulse.
time.sleep_us(10)
self.trigger.value(0)
try:
pulse_time = machine.time_pulse_us(self.echo, 1, self.echo_timeout_us)
return pulse_time
except OSError as ex:
if ex.args[0] == 110: # 110 = ETIMEDOUT
raise OSError('Out of range')
raise ex
def distance_mm(self):
"""
Get the distance in milimeters without floating point operations.
"""
pulse_time = self._send_pulse_and_wait()
# To calculate the distance we get the pulse_time and divide it by 2
# (the pulse walk the distance twice) and by 29.1 becasue
# the sound speed on air (343.2 m/s), that It's equivalent to
# 0.34320 mm/us that is 1mm each 2.91us
# pulse_time // 2 // 2.91 -> pulse_time // 5.82 -> pulse_time * 100 // 582
mm = pulse_time * 100 // 582
return mm
def distance_cm(self):
"""
Get the distance in centimeters with floating point operations.
It returns a float
"""
pulse_time = self._send_pulse_and_wait()
# To calculate the distance we get the pulse_time and divide it by 2
# (the pulse walk the distance twice) and by 29.1 becasue
# the sound speed on air (343.2 m/s), that It's equivalent to
# 0.034320 cm/us that is 1cm each 29.1us
cms = (pulse_time / 2) / 29.1
return cms
main.py
В файле main.py мы получаем расстояние и отображаем его на OLED-дисплее. Загрузите его на плату с именем main.py.
from machine import Pin, I2C
import ssd1306
from hcsr04 import HCSR04
from time import sleep
# Initialize I2C for SSD1306 OLED (Pico: SCL = GPIO 5, SDA = GPIO 4 for I2C1)
i2c = I2C(scl=Pin(5), sda=Pin(4))
# Initialize HC-SR04 ultrasonic sensor (trigger = GPIO 27, echo = GPIO 28)
sensor = HCSR04(trigger_pin=27, echo_pin=28, echo_timeout_us=10000)
# Initialize SSD1306 OLED (128x64)
oled_width = 128
oled_height = 64
oled = ssd1306.SSD1306_I2C(oled_width, oled_height, i2c)
while True:
try:
# Measure distance in centimeters
distance_cm = sensor.distance_cm()
# Convert distance from centimeters to inches
#distance_inch = distance_cm * 0.393701
# Print to shell
print('Distance: {:.2f} cm'.format(distance_cm))
# Clear OLED and display distance in cm
oled.fill(0)
oled.text("Distance:", 0, 10)
oled.text("{:.2f} cm".format(distance_cm), 0, 30)
oled.show()
except OSError as e:
# Handle sensor errors (e.g., out of range)
print('Error:', e)
oled.fill(0)
oled.text("Error:", 0, 10)
oled.text("Out of range", 0, 30)
oled.show()
# Wait 1 second before next measurement
sleep(1)
Код прост для понимания. Чтобы узнать больше об использовании OLED-дисплея с RPi Pico на MicroPython, обратитесь к следующему руководству:
Код начинается с импорта необходимых библиотек.
from machine import Pin, I2C
import ssd1306
from hcsr04 import HCSR04
from time import sleep
Задайте выводы для OLED-дисплея и ультразвукового датчика.
i2c = I2C(scl=Pin(5), sda=Pin(4))
sensor = HCSR04(trigger_pin=27, echo_pin=28, echo_timeout_us=10000)
Определите ширину и высоту OLED и инициализируйте OLED-дисплей.
oled_width = 128
oled_height = 64
oled = ssd1306.SSD1306_I2C(oled_width, oled_height, i2c)
Цикл while – это место, где мы получаем расстояние и отображаем его на OLED. Как и в предыдущем коде, мы используем операторы try и except для перехвата любых ошибок, которые могут возникнуть во время выполнения программы.
Получите расстояние в сантиметрах и сохраните его в переменной distance_cm.
distance = sensor.distance_cm()
Выведите расстояние в консоль.
print('Distance:', distance, 'mm')
Очистите дисплей в каждой итерации с помощью oled.fill(0).
oled.fill(0)
Отобразите расстояние на дисплее.
oled.fill(0)
oled.text("Distance:", 0, 10)
oled.text("{:.2f} cm".format(distance_cm), 0, 30)
oled.show()
Наконец, вызовите oled.show(), чтобы фактически отобразить текст.
oled.show()
Расстояние обновляется каждую секунду.
sleep(1)
В случае возникновения ошибок они будут обработаны в операторе except.
except OSError as e:
# Handle sensor errors
print('Error:', e)
oled.fill(0)
oled.text("Error:", 0, 10)
oled.text("Out of range", 0, 30)
oled.show()
Демонстрация
Загрузите все предыдущие файлы на плату RPi Pico в следующем порядке, как описано ранее:
ssd1306.py
hcsr04.py
main.py
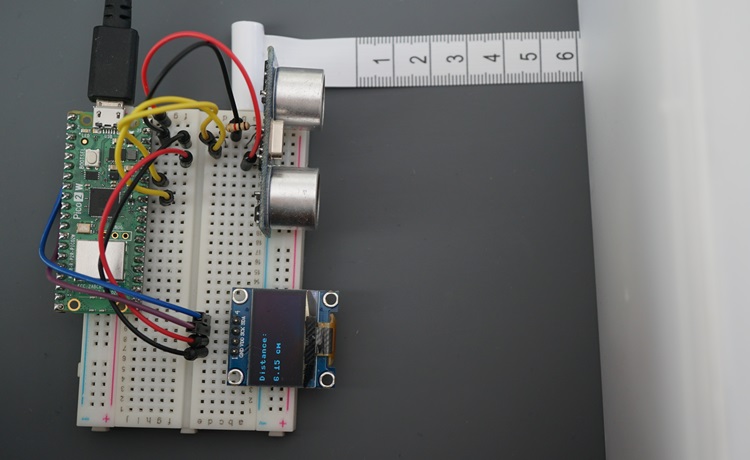
После загрузки кода он должен начать выполняться и отображать расстояние в мм на OLED-дисплее, как показано на следующем изображении.
Заключение
Надеемся, что это руководство было для вас полезным. У нас есть ещё проекты и руководства для Raspberry Pi Pico с MicroPython с другими популярными датчиками, которые могут вас заинтересовать: