Arduino к Arduino через Bluetooth
Обновлено 12.06.2016: Добавлен пример 2
В статье Подключение 2 Arduino через Bluetooth с помощью HC-05 и HC-06: Pair, Bind и Link автор объяснил, как подключить HC-05 к HC-06 так, чтобы при включении они автоматически устанавливали соединение. Здесь мы рассмотрим использование этого соединения для организации связи между Arduino через Bluetooth. Перед продолжением необходимо настроить Arduino и BT-модули согласно предыдущей статье. В данном примере используются 2 модуля HC-05: один в режиме Master, другой в режиме Slave. Процесс настройки HC-05 в режиме Slave аналогичен настройке HC-06 из предыдущей статьи.
Настройка
Используются 5В Arduino Nano, но подойдёт любой 5В AVR-Arduino.
Одна из Arduino обозначена как ведущее устройство (Master). Это устройство, которое инициирует соединение, и в первом примере именно оно отправляет команды. Схема Master-Slave немного упрощает программирование.
Для связи с BT-модулями используется библиотека AltSoftSerial, которая задействует пины 8 и 9. Библиотеку AltSoftSerial можно скачать с https://www.pjrc.com/teensy/td_libs_AltSoftSerial.html — её необходимо установить перед компиляцией примеров.
Оба BT-модуля настроены на скорость 9600 бод. Её можно изменить, но убедитесь, что скорость совпадает с указанной при открытии программного последовательного соединения.
// open software serial connection to the Bluetooth module.
BTserial.begin(9600);
Подключение Bluetooth-модулей
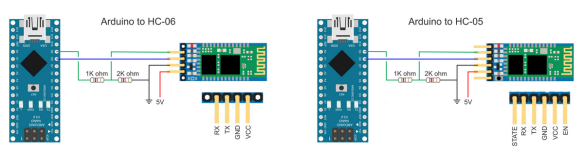
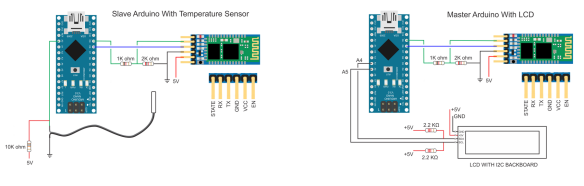
Большинство HC-05 и HC-06 имеют пины TX и RX на 3.3В. 5В Arduino считает 3.3В как HIGH, поэтому пин TX BT-модуля можно подключить напрямую к пину RX Arduino. Однако пин TX Arduino необходимо преобразовать в 3.3В перед подключением к пину RX BT-модуля. Простой способ — использовать делитель напряжения из 2 резисторов; обычно используется 1 x 1 кОм и 1 x 2 кОм.
Arduino RX (пин 8) к пину TX BT-модуля
Arduino TX (пин 9) к пину RX BT-модуля через делитель напряжения
Оба Arduino имеют одинаковые подключения к BT-модулям.
Пример 1: Удалённое управление светодиодом
В первом примере одна Arduino управляет светодиодом, подключённым ко второй Arduino. Связь односторонняя, без проверки ошибок. Arduino #1 просто отправляет команды LEDON и LEDOFF на Arduino #2. Когда Arduino #2 получает команды, она устанавливает светодиод соответственно.
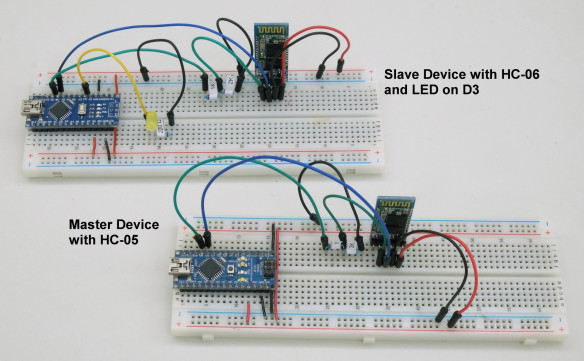
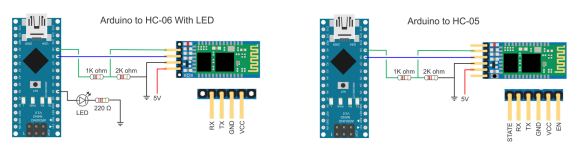
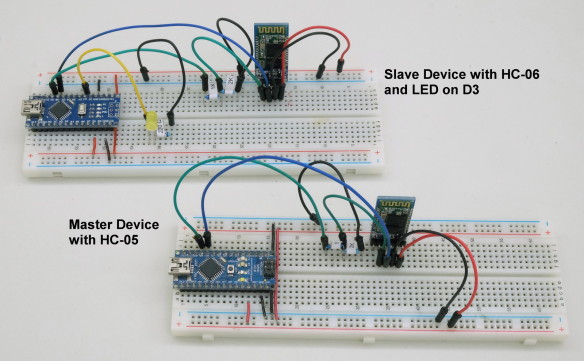
Пример 1: Схема
Arduino #1 (ведущее устройство) имеет только Bluetooth-модуль. Arduino #2 (ведомое устройство) имеет Bluetooth-модуль и светодиод (с подходящим резистором) на пине D3.
Пример 1: Скетчи
Скетч на Arduino #1 (ведущее устройство, подключённое к HC-05) просто отправляет команду LEDON, ждёт секунду, отправляет команду LEDOFF, ждёт ещё секунду и повторяет бесконечно.
/*
* Sketch: Arduino2Arduino_MASTER_01
* By Martyn Currey
* 08.04.2016
* Written in Arduino IDE 1.6.3
*
* Send commands through a serial connection to turn a LED on and OFF on a remote Arduino
* There is no error checking and this sketch sends only
* Commands should be contained within the start and end markers < and >
*
* D8 - AltSoftSerial RX
* D9 - AltSoftSerial TX
*
*/
// AltSoftSerial uses D9 for TX and D8 for RX. While using AltSoftSerial D10 cannot be used for PWM.
// Remember to use a voltage divider on the Arduino TX pin / Bluetooth RX pin
// Download AltSoftSerial from https://www.pjrc.com/teensy/td_libs_AltSoftSerial.html
#include <AltSoftSerial.h>
AltSoftSerial BTserial;
// Change DEBUG to true to output debug information to the serial monitor
boolean DEBUG = true;
void setup()
{
if (DEBUG)
{
// open serial communication for debugging and show
// the sketch filename and the date compiled
Serial.begin(9600);
Serial.println(__FILE__);
Serial.println(__DATE__);
Serial.println(" ");
}
// open software serial connection to the Bluetooth module.
BTserial.begin(9600);
if (DEBUG) { Serial.println("BTserial started at 9600"); }
} // void setup()
void loop()
{
BTserial.println("<LEDON>");
if (DEBUG) {Serial.println("LEDON command sent");}
delay (1000);
BTserial.println("<LEDOFF>");
if (DEBUG) {Serial.println("LEDOFF command sent");}
delay (1000);
}
Обратите внимание, что команды заключены в начальный и конечный маркеры < и >.
BTserial.println("<LEDON>");
BTserial.println("<LEDOFF>");
Использование начальных и конечных маркеров позволяет принимающему устройству проверить, что команда получена полностью, прежде чем действовать.
Скетч на Arduino #2 (ведомое устройство) проверяет наличие данных, и если есть начальный маркер, начинает помещать полученные данные в переменную receivedChars[]. При получении конечного маркера устанавливается флаг newData в TRUE. Любые данные вне начального и конечного маркеров игнорируются.
Когда newData становится TRUE, мы знаем, что есть команда для обработки. В данном случае мы устанавливаем пин D3 в HIGH или LOW для включения или выключения светодиода.
if (strcmp ("LEDON",receivedChars) == 0) { digitalWrite(3,HIGH); }
else if (strcmp ("LEDOFF",receivedChars) == 0) { digitalWrite(3,LOW); }
Полный скетч ведомого устройства:
/*
* Sketch: Arduino2Arduino_SLAVE_01
* By Martyn Currey
* 08.04.2016
* Written in Arduino IDE 1.6.3
*
* Receive commands through a serial connection and turn a LED on or OFF
* There is no error checking and this sketch receives only
* Commands should be contained within the start and end markers < and >
*
* D8 - software serial RX
* D9 - software serial TX
* D3 - LED
*
*/
// AltSoftSerial uses D9 for TX and D8 for RX. While using AltSoftSerial D10 cannot be used for PWM.
// Remember to use a voltage divider on the Arduino TX pin / Bluetooth RX pin
// Download AltSoftSerial from https://www.pjrc.com/teensy/td_libs_AltSoftSerial.html
#include <AltSoftSerial.h>
AltSoftSerial BTserial;
// Change DEBUG to true to output debug information to the serial monitor
boolean DEBUG = true;
// Variables used for incoming data
const byte maxDataLength = 20; // maxDataLength is the maximum length allowed for received data.
char receivedChars[maxDataLength+1] ;
boolean newData = false; // newData is used to determine if there is a new command
void setup()
{
// LED on pin 3
pinMode(3, OUTPUT);
digitalWrite(3,LOW);
if (DEBUG)
{
// open serial communication for debugging and show the sketch name and the date compiled
Serial.begin(9600);
Serial.println(__FILE__);
Serial.println(__DATE__);
Serial.println(" ");
}
// open software serial connection to the Bluetooth module.
BTserial.begin(9600);
if (DEBUG) { Serial.println(F("AltSoftSerial started at 9600")); }
newData = false;
} // void setup()
void loop()
{
recvWithStartEndMarkers(); // check to see if we have received any new commands
if (newData) { processCommand(); } // if we have a new command do something
}
void processCommand()
{
newData = false;
if (DEBUG) { Serial.print("recieved data = "); Serial.println(receivedChars); }
if (strcmp ("LEDON",receivedChars) == 0) { digitalWrite(3,HIGH); }
else if (strcmp ("LEDOFF",receivedChars) == 0) { digitalWrite(3,LOW); }
}
// function recvWithStartEndMarkers by Robin2 of the Arduino forums
// See http://forum.arduino.cc/index.php?topic=288234.0
void recvWithStartEndMarkers()
{
static boolean recvInProgress = false;
static byte ndx = 0;
char startMarker = '<';
char endMarker = '>';
if (BTserial.available() > 0)
{
char rc = BTserial.read();
if (recvInProgress == true)
{
if (rc != endMarker)
{
if (ndx < maxDataLength) { receivedChars[ndx] = rc; ndx++; }
}
else
{
receivedChars[ndx] = '\0'; // terminate the string
recvInProgress = false;
ndx = 0;
newData = true;
}
}
else if (rc == startMarker) { recvInProgress = true; }
}
}
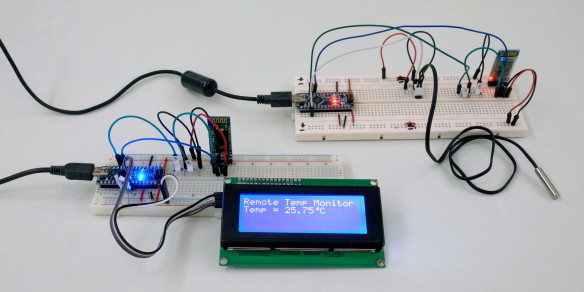
Пример 2: Удалённый мониторинг температуры
Этот пример немного сложнее. В отличие от примера 1, где ведущее устройство начинает отправлять данные сразу при запуске, здесь оно запрашивает данные у ведомого. Ведомое устройство получает запрос от ведущего и отвечает.
Ведомое устройство ждёт запроса sendTemp, затем считывает значение датчика температуры на пине A0, преобразует значение в градусы Цельсия и отправляет его в ASCII через программный последовательный канал. Скетчи используют ту же функцию recvWithStartEndMarkers(), поэтому данные оборачиваются в маркеры < и >.
Как и прежде, Bluetooth-модули настроены на автоматическое подключение при запуске. Однако на этот раз используются 2 модуля HC-05: один в режиме Master, один в режиме Slave.
При запуске ведущее устройство инициализирует LCD и запускает таймер. Когда таймер срабатывает, отправляется запрос температуры. Таймер затем сбрасывается. В основном цикле скетч непрерывно проверяет полученные данные. При получении температуры она отображается на LCD.
Ведомое устройство просто ждёт запроса. При получении запроса отправляет температуру и возвращается к ожиданию.
Пример 2: Схема
Пример 2: Скетчи
Скетч на ведущем устройстве довольно прост. Раз в секунду он отправляет запрос ведомому устройству и ждёт ответ. Частоту запроса можно изменить, изменив значение waitTime. Нет проверки ошибок или тайм-аута, и скетч не знает, получил ли он когда-либо ответ.
/*
* Sketch: Arduino2Arduino_example2_RemoteTemp_Master
* By Martyn Currey
* 11.05.2016
* Written in Arduino IDE 1.6.3
*
* Send a temperature reading by Bluetooth
* Uses the following pins
*
* D8 - software serial RX
* D9 - software serial TX
* A0 - single wire temperature sensor
*
*
* AltSoftSerial uses D9 for TX and D8 for RX. While using AltSoftSerial D10 cannot be used for PWM.
* Remember to use a voltage divider on the Arduino TX pin / Bluetooth RX pin
* Download from https://www.pjrc.com/teensy/td_libs_AltSoftSerial.html
*/
#include <AltSoftSerial.h>
AltSoftSerial BTserial;
// If you don't have an LCD you can use the serial monitor.
// I use the LCD library from https://bitbucket.org/fmalpartida/new-liquidcrystal/wiki/Home
// if you use a different library change the following lines
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE); // Set the LCD I2C address
// define the pattern for a custom degree character. You can also use chr 233
byte degreeChr[8] = { B00111, B00101, B00111, B00000, B00000, B00000, B00000,};
// Set DEBUG to true to output debug information to the serial monitor
boolean DEBUG = true;
// Variables used for incoming data
const byte maxDataLength = 20;
char receivedChars[21] ;
boolean newData = false;
// Variables used for the timer
unsigned long startTime = 0;
unsigned long waitTime = 1000;
const byte TEMP_PIN = A0;
void setup()
{
lcd.begin(20,4);
lcd.createChar(1, degreeChr);
lcd.setCursor(0,0); lcd.print("Remote Temp Monitor");
lcd.setCursor(0,1); lcd.print("Starting...");
if (DEBUG)
{
// open serial communication for debugging
Serial.begin(9600);
Serial.println(__FILE__);
Serial.println(" ");
}
BTserial.begin(9600);
if (DEBUG) { Serial.println("AltSoftSerial started at 9600"); }
newData = false;
startTime = millis();
} // void setup()
void loop()
{
if ( millis()-startTime > waitTime )
{
BTserial.print("<sendTemp>");
if (DEBUG) { Serial.println("Request sent"); }
startTime = millis();
}
recvWithStartEndMarkers();
if (newData)
{
if (DEBUG) { Serial.println("Data received"); }
lcd.setCursor(0,1); lcd.print("Temp = ");
lcd.setCursor(7,1); lcd.print(receivedChars);
lcd.write(1); lcd.print("C");
newData = false;
receivedChars[0]='\0';
}
}
// function recvWithStartEndMarkers by Robin2 of the Arduino forums
// See http://forum.arduino.cc/index.php?topic=288234.0
void recvWithStartEndMarkers()
{
static boolean recvInProgress = false;
static byte ndx = 0;
char startMarker = '<';
char endMarker = '>';
char rc;
if (BTserial.available() > 0)
{
rc = BTserial.read();
if (recvInProgress == true)
{
if (rc != endMarker)
{
receivedChars[ndx] = rc;
ndx++;
if (ndx > maxDataLength) { ndx = maxDataLength; }
}
else
{
receivedChars[ndx] = '\0'; // terminate the string
recvInProgress = false;
ndx = 0;
newData = true;
}
}
else if (rc == startMarker) { recvInProgress = true; }
}
}
Скетч ведомого устройства столь же прост. Он ждёт запроса, и при получении отправляет текущую температуру.
/*
* Sketch: Arduino2Arduino_example2_RemoteTemp_Slave
* By Martyn Currey
* 11.05.2016
* Written in Arduino IDE 1.6.3
*
* Send a temperature reading by Bluetooth
* Uses the following pins
*
* D8 - software serial RX
* D9 - software serial TX
* A0 - single wire temperature sensor
*
*
* AltSoftSerial uses D9 for TX and D8 for RX. While using AltSoftSerial D10 cannot be used for PWM.
* Remember to use a voltage divider on the Arduino TX pin / Bluetooth RX pin
* Download from https://www.pjrc.com/teensy/td_libs_AltSoftSerial.html
*/
#include <AltSoftSerial.h>
AltSoftSerial BTserial;
// Set DEBUG to true to output debug information to the serial monitor
boolean DEBUG = true;
// Variables used for incoming data
const byte maxDataLength = 20;
char receivedChars[21] ;
boolean newData = false;
const byte TEMP_PIN = A0;
void setup()
{
if (DEBUG)
{
// open serial communication for debugging
Serial.begin(9600);
Serial.println(__FILE__);
Serial.println(" ");
}
// open a software serial connection to the Bluetooth module.
BTserial.begin(9600);
if (DEBUG) { Serial.println(F("AltSoftSerial started at 9600")); }
newData = false;
} // void setup()
void loop()
{
recvWithStartEndMarkers();
if (newData) { processCommand(); }
}
/*
****************************************
* Function getTemp
* read an analogue pin and converts the value to a temperature
* based on the adafruit thermistor guide https://learn.adafruit.com/thermistor/testing-a-thermistor
*/
float getTemp()
{
float reading = analogRead(TEMP_PIN);
reading = 1023 / reading - 1;
reading = 10000 / reading;
float steinhart;
steinhart = reading / 10000; // (R/Ro)
steinhart = log(steinhart); // ln(R/Ro)
steinhart /= 3950; // 1/B * ln(R/Ro)
steinhart += 1.0 / (25 + 273.15); // + (1/To)
steinhart = 1.0 / steinhart; // Invert
steinhart -= 273.15; // convert to C
return steinhart;
}
void processCommand()
{
Serial.println(receivedChars);
if (strcmp ("sendTemp",receivedChars) == 0)
{
float temp = getTemp();
BTserial.print("<"); BTserial.print( temp ); BTserial.print(">");
if (DEBUG) { Serial.print("Temp is "); Serial.print(temp); Serial.println(""); }
}
newData = false;
receivedChars[0]='\0';
}
// function recvWithStartEndMarkers by Robin2 of the Arduino forums
// See http://forum.arduino.cc/index.php?topic=288234.0
void recvWithStartEndMarkers()
{
static boolean recvInProgress = false;
static byte ndx = 0;
char startMarker = '<';
char endMarker = '>';
char rc;
if (BTserial.available() > 0)
{
rc = BTserial.read();
if (recvInProgress == true)
{
if (rc != endMarker)
{
receivedChars[ndx] = rc;
ndx++;
if (ndx > maxDataLength) { ndx = maxDataLength; }
}
else
{
receivedChars[ndx] = '\0'; // terminate the string
recvInProgress = false;
ndx = 0;
newData = true;
}
}
else if (rc == startMarker) { recvInProgress = true; }
}
}