ESP32-CAM: робот-машинка с веб-сервером (видеостриминг и дистанционное управление)
Соберите робот-машинку с дистанционным управлением по Wi-Fi на базе ESP32-CAM. Вы сможете управлять роботом через веб-сервер, на котором отображается видеопоток того, что «видит» робот. Вы можете управлять роботом удалённо, даже если он находится вне зоны прямой видимости. ESP32-CAM будет запрограммирован с помощью Arduino IDE.

Совместимость плат: для этого проекта требуется 4 GPIO для управления DC-моторами. Поэтому можно использовать любую плату ESP32 с камерой, имеющую 4 свободных GPIO, например ESP32-CAM Ai-Thinker или TTGO T-Journal.
Обзор проекта
Прежде чем приступить к проекту, рассмотрим основные особенности и компоненты, используемые для сборки робота.
Wi-Fi
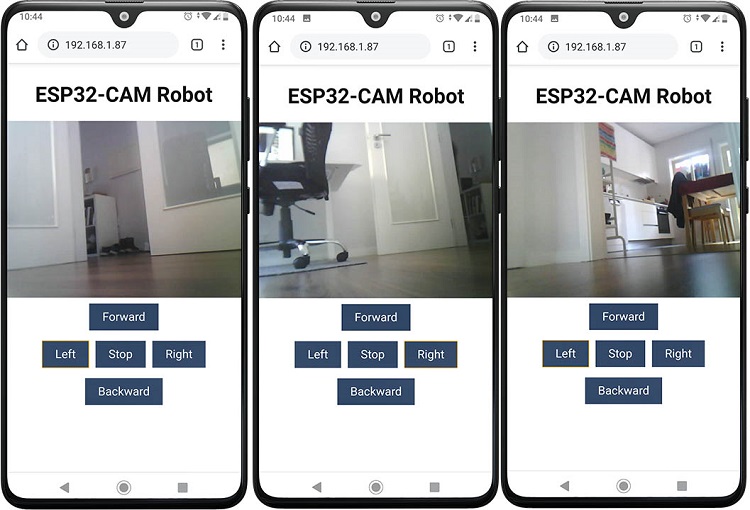
Робот будет управляться по Wi-Fi с помощью ESP32-CAM. Мы создадим веб-интерфейс для управления роботом, доступный с любого устройства в вашей локальной сети.
На веб-странице также отображается видеопоток того, что «видит» робот. Для качественного видеостриминга рекомендуем использовать ESP32-CAM с внешней антенной.

Важно: без внешней антенны видеопоток будет сильно тормозить, а веб-сервер — очень медленно реагировать на команды управления роботом.
Управление роботом
Веб-сервер имеет 5 элементов управления: Вперёд, Назад, Влево, Вправо и Стоп.
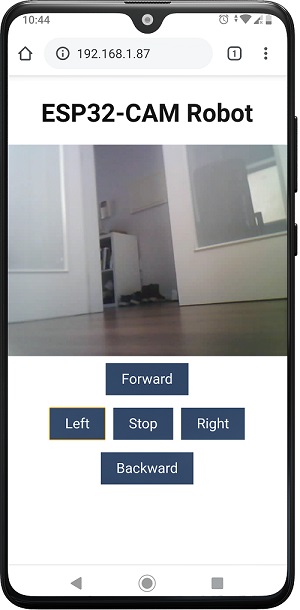
Робот движется до тех пор, пока вы удерживаете кнопку. Когда вы отпускаете любую кнопку, робот останавливается. Тем не менее, мы добавили кнопку Стоп, которая может быть полезна в случае, если ESP32 не получит команду остановки при отпускании кнопки.
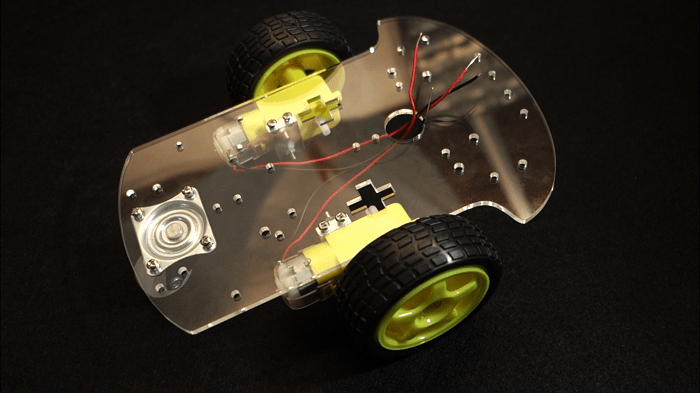
Шасси робот-машинки (Smart Robot Chassis Kit)
Мы будем использовать Smart Robot Chassis Kit. Его можно найти в большинстве интернет-магазинов. Комплект стоит около $10 и легко собирается — посмотрите это видео, чтобы узнать, как собрать шасси.
Вы можете использовать любое другое шасси, если оно имеет два DC-мотора.
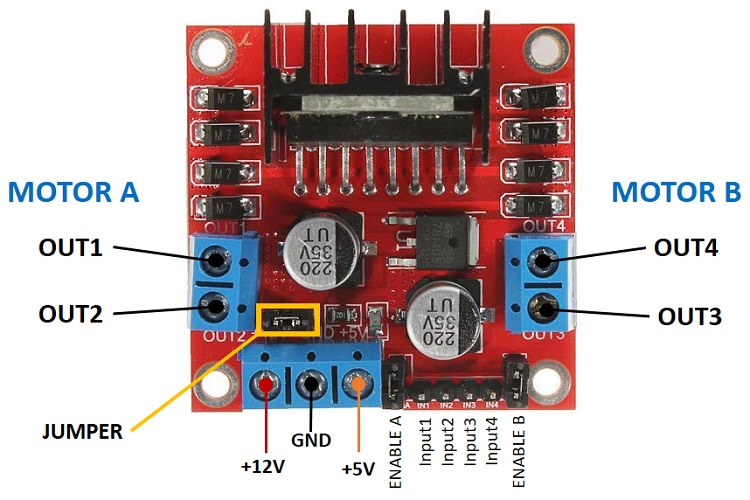
Драйвер двигателей L298N
Существует множество способов управления DC-моторами. Мы будем использовать драйвер двигателей L298N, который обеспечивает простой способ управления скоростью и направлением вращения двух DC-моторов.
Мы не будем подробно объяснять принцип работы L298N. Прочитайте следующую статью для подробного руководства по L298N:
Питание
Для простоты схемы мы будем питать робота (моторы) и ESP32 от одного источника питания. Мы использовали PowerBank (портативное зарядное устройство, как для зарядки смартфона), и он хорошо справился.

Примечание: моторы потребляют много тока, поэтому, если вы чувствуете, что ваш робот двигается неправильно, вам может потребоваться использовать отдельный источник питания для моторов. Это означает, что нужно два разных источника питания: один для DC-моторов, другой для ESP32.
Необходимые компоненты
Для этого проекта нам понадобятся следующие компоненты:
PowerBank или другой источник питания 5В
Код
Скопируйте следующий код в вашу Arduino IDE.
/*********
Rui Santos & Sara Santos - Random Nerd Tutorials
Complete instructions at https://RandomNerdTutorials.com/esp32-cam-projects-ebook/
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files.
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
*********/
#include "esp_camera.h"
#include <WiFi.h>
#include "esp_timer.h"
#include "img_converters.h"
#include "Arduino.h"
#include "fb_gfx.h"
#include "soc/soc.h" // disable brownout problems
#include "soc/rtc_cntl_reg.h" // disable brownout problems
#include "esp_http_server.h"
// Replace with your network credentials
const char* ssid = "REPLACE_WITH_YOUR_SSID";
const char* password = "REPLACE_WITH_YOUR_PASSWORD";
#define PART_BOUNDARY "123456789000000000000987654321"
#define CAMERA_MODEL_AI_THINKER
//#define CAMERA_MODEL_M5STACK_PSRAM
//#define CAMERA_MODEL_M5STACK_WITHOUT_PSRAM
//#define CAMERA_MODEL_M5STACK_PSRAM_B
//#define CAMERA_MODEL_WROVER_KIT
#if defined(CAMERA_MODEL_WROVER_KIT)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 21
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 19
#define Y4_GPIO_NUM 18
#define Y3_GPIO_NUM 5
#define Y2_GPIO_NUM 4
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
#elif defined(CAMERA_MODEL_M5STACK_PSRAM)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM 15
#define XCLK_GPIO_NUM 27
#define SIOD_GPIO_NUM 25
#define SIOC_GPIO_NUM 23
#define Y9_GPIO_NUM 19
#define Y8_GPIO_NUM 36
#define Y7_GPIO_NUM 18
#define Y6_GPIO_NUM 39
#define Y5_GPIO_NUM 5
#define Y4_GPIO_NUM 34
#define Y3_GPIO_NUM 35
#define Y2_GPIO_NUM 32
#define VSYNC_GPIO_NUM 22
#define HREF_GPIO_NUM 26
#define PCLK_GPIO_NUM 21
#elif defined(CAMERA_MODEL_M5STACK_WITHOUT_PSRAM)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM 15
#define XCLK_GPIO_NUM 27
#define SIOD_GPIO_NUM 25
#define SIOC_GPIO_NUM 23
#define Y9_GPIO_NUM 19
#define Y8_GPIO_NUM 36
#define Y7_GPIO_NUM 18
#define Y6_GPIO_NUM 39
#define Y5_GPIO_NUM 5
#define Y4_GPIO_NUM 34
#define Y3_GPIO_NUM 35
#define Y2_GPIO_NUM 17
#define VSYNC_GPIO_NUM 22
#define HREF_GPIO_NUM 26
#define PCLK_GPIO_NUM 21
#elif defined(CAMERA_MODEL_AI_THINKER)
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
#elif defined(CAMERA_MODEL_M5STACK_PSRAM_B)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM 15
#define XCLK_GPIO_NUM 27
#define SIOD_GPIO_NUM 22
#define SIOC_GPIO_NUM 23
#define Y9_GPIO_NUM 19
#define Y8_GPIO_NUM 36
#define Y7_GPIO_NUM 18
#define Y6_GPIO_NUM 39
#define Y5_GPIO_NUM 5
#define Y4_GPIO_NUM 34
#define Y3_GPIO_NUM 35
#define Y2_GPIO_NUM 32
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 26
#define PCLK_GPIO_NUM 21
#else
#error "Camera model not selected"
#endif
#define MOTOR_1_PIN_1 14
#define MOTOR_1_PIN_2 15
#define MOTOR_2_PIN_1 13
#define MOTOR_2_PIN_2 12
static const char* _STREAM_CONTENT_TYPE = "multipart/x-mixed-replace;boundary=" PART_BOUNDARY;
static const char* _STREAM_BOUNDARY = "\r\n--" PART_BOUNDARY "\r\n";
static const char* _STREAM_PART = "Content-Type: image/jpeg\r\nContent-Length: %u\r\n\r\n";
httpd_handle_t camera_httpd = NULL;
httpd_handle_t stream_httpd = NULL;
static const char PROGMEM INDEX_HTML[] = R"rawliteral(
<html>
<head>
<title>ESP32-CAM Robot</title>
<meta name="viewport" content="width=device-width, initial-scale=1">
<style>
body { font-family: Arial; text-align: center; margin:0px auto; padding-top: 30px;}
table { margin-left: auto; margin-right: auto; }
td { padding: 8 px; }
.button {
background-color: #2f4468;
border: none;
color: white;
padding: 10px 20px;
text-align: center;
text-decoration: none;
display: inline-block;
font-size: 18px;
margin: 6px 3px;
cursor: pointer;
-webkit-touch-callout: none;
-webkit-user-select: none;
-khtml-user-select: none;
-moz-user-select: none;
-ms-user-select: none;
user-select: none;
-webkit-tap-highlight-color: rgba(0,0,0,0);
}
img { width: auto ;
max-width: 100% ;
height: auto ;
}
</style>
</head>
<body>
<h1>ESP32-CAM Robot</h1>
<img src="" id="photo" >
<table>
<tr><td colspan="3" align="center"><button class="button" onmousedown="toggleCheckbox('forward');" ontouchstart="toggleCheckbox('forward');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Forward</button></td></tr>
<tr><td align="center"><button class="button" onmousedown="toggleCheckbox('left');" ontouchstart="toggleCheckbox('left');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Left</button></td><td align="center"><button class="button" onmousedown="toggleCheckbox('stop');" ontouchstart="toggleCheckbox('stop');">Stop</button></td><td align="center"><button class="button" onmousedown="toggleCheckbox('right');" ontouchstart="toggleCheckbox('right');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Right</button></td></tr>
<tr><td colspan="3" align="center"><button class="button" onmousedown="toggleCheckbox('backward');" ontouchstart="toggleCheckbox('backward');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Backward</button></td></tr>
</table>
<script>
function toggleCheckbox(x) {
var xhr = new XMLHttpRequest();
xhr.open("GET", "/action?go=" + x, true);
xhr.send();
}
window.onload = document.getElementById("photo").src = window.location.href.slice(0, -1) + ":81/stream";
</script>
</body>
</html>
)rawliteral";
static esp_err_t index_handler(httpd_req_t *req){
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, (const char *)INDEX_HTML, strlen(INDEX_HTML));
}
static esp_err_t stream_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
size_t _jpg_buf_len = 0;
uint8_t * _jpg_buf = NULL;
char * part_buf[64];
res = httpd_resp_set_type(req, _STREAM_CONTENT_TYPE);
if(res != ESP_OK){
return res;
}
while(true){
fb = esp_camera_fb_get();
if (!fb) {
Serial.println("Camera capture failed");
res = ESP_FAIL;
} else {
if(fb->width > 400){
if(fb->format != PIXFORMAT_JPEG){
bool jpeg_converted = frame2jpg(fb, 80, &_jpg_buf, &_jpg_buf_len);
esp_camera_fb_return(fb);
fb = NULL;
if(!jpeg_converted){
Serial.println("JPEG compression failed");
res = ESP_FAIL;
}
} else {
_jpg_buf_len = fb->len;
_jpg_buf = fb->buf;
}
}
}
if(res == ESP_OK){
size_t hlen = snprintf((char *)part_buf, 64, _STREAM_PART, _jpg_buf_len);
res = httpd_resp_send_chunk(req, (const char *)part_buf, hlen);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, (const char *)_jpg_buf, _jpg_buf_len);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, _STREAM_BOUNDARY, strlen(_STREAM_BOUNDARY));
}
if(fb){
esp_camera_fb_return(fb);
fb = NULL;
_jpg_buf = NULL;
} else if(_jpg_buf){
free(_jpg_buf);
_jpg_buf = NULL;
}
if(res != ESP_OK){
break;
}
//Serial.printf("MJPG: %uB\n",(uint32_t)(_jpg_buf_len));
}
return res;
}
static esp_err_t cmd_handler(httpd_req_t *req){
char* buf;
size_t buf_len;
char variable[32] = {0,};
buf_len = httpd_req_get_url_query_len(req) + 1;
if (buf_len > 1) {
buf = (char*)malloc(buf_len);
if(!buf){
httpd_resp_send_500(req);
return ESP_FAIL;
}
if (httpd_req_get_url_query_str(req, buf, buf_len) == ESP_OK) {
if (httpd_query_key_value(buf, "go", variable, sizeof(variable)) == ESP_OK) {
} else {
free(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
} else {
free(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
free(buf);
} else {
httpd_resp_send_404(req);
return ESP_FAIL;
}
sensor_t * s = esp_camera_sensor_get();
int res = 0;
if(!strcmp(variable, "forward")) {
Serial.println("Forward");
digitalWrite(MOTOR_1_PIN_1, 1);
digitalWrite(MOTOR_1_PIN_2, 0);
digitalWrite(MOTOR_2_PIN_1, 1);
digitalWrite(MOTOR_2_PIN_2, 0);
}
else if(!strcmp(variable, "left")) {
Serial.println("Left");
digitalWrite(MOTOR_1_PIN_1, 0);
digitalWrite(MOTOR_1_PIN_2, 1);
digitalWrite(MOTOR_2_PIN_1, 1);
digitalWrite(MOTOR_2_PIN_2, 0);
}
else if(!strcmp(variable, "right")) {
Serial.println("Right");
digitalWrite(MOTOR_1_PIN_1, 1);
digitalWrite(MOTOR_1_PIN_2, 0);
digitalWrite(MOTOR_2_PIN_1, 0);
digitalWrite(MOTOR_2_PIN_2, 1);
}
else if(!strcmp(variable, "backward")) {
Serial.println("Backward");
digitalWrite(MOTOR_1_PIN_1, 0);
digitalWrite(MOTOR_1_PIN_2, 1);
digitalWrite(MOTOR_2_PIN_1, 0);
digitalWrite(MOTOR_2_PIN_2, 1);
}
else if(!strcmp(variable, "stop")) {
Serial.println("Stop");
digitalWrite(MOTOR_1_PIN_1, 0);
digitalWrite(MOTOR_1_PIN_2, 0);
digitalWrite(MOTOR_2_PIN_1, 0);
digitalWrite(MOTOR_2_PIN_2, 0);
}
else {
res = -1;
}
if(res){
return httpd_resp_send_500(req);
}
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, NULL, 0);
}
void startCameraServer(){
httpd_config_t config = HTTPD_DEFAULT_CONFIG();
config.server_port = 80;
httpd_uri_t index_uri = {
.uri = "/",
.method = HTTP_GET,
.handler = index_handler,
.user_ctx = NULL
};
httpd_uri_t cmd_uri = {
.uri = "/action",
.method = HTTP_GET,
.handler = cmd_handler,
.user_ctx = NULL
};
httpd_uri_t stream_uri = {
.uri = "/stream",
.method = HTTP_GET,
.handler = stream_handler,
.user_ctx = NULL
};
if (httpd_start(&camera_httpd, &config) == ESP_OK) {
httpd_register_uri_handler(camera_httpd, &index_uri);
httpd_register_uri_handler(camera_httpd, &cmd_uri);
}
config.server_port += 1;
config.ctrl_port += 1;
if (httpd_start(&stream_httpd, &config) == ESP_OK) {
httpd_register_uri_handler(stream_httpd, &stream_uri);
}
}
void setup() {
WRITE_PERI_REG(RTC_CNTL_BROWN_OUT_REG, 0); //disable brownout detector
pinMode(MOTOR_1_PIN_1, OUTPUT);
pinMode(MOTOR_1_PIN_2, OUTPUT);
pinMode(MOTOR_2_PIN_1, OUTPUT);
pinMode(MOTOR_2_PIN_2, OUTPUT);
Serial.begin(115200);
Serial.setDebugOutput(false);
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sccb_sda = SIOD_GPIO_NUM;
config.pin_sccb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
if(psramFound()){
config.frame_size = FRAMESIZE_VGA;
config.jpeg_quality = 10;
config.fb_count = 2;
} else {
config.frame_size = FRAMESIZE_SVGA;
config.jpeg_quality = 12;
config.fb_count = 1;
}
// Camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
return;
}
// Wi-Fi connection
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
Serial.print("Camera Stream Ready! Go to: http://");
Serial.println(WiFi.localIP());
// Start streaming web server
startCameraServer();
}
void loop() {
}
Посмотреть исходный код на GitHub
Вставьте свои сетевые учётные данные, и код должен сразу работать.
const char* ssid = "REPLACE_WITH_YOUR_SSID";
const char* password = "REPLACE_WITH_YOUR_PASSWORD";
Как работает код
Рассмотрим ключевые части кода для управления роботом. Определите GPIO, которые будут управлять моторами. Каждый мотор управляется двумя пинами.
#define MOTOR_1_PIN_1 14
#define MOTOR_1_PIN_2 15
#define MOTOR_2_PIN_1 13
#define MOTOR_2_PIN_2 12
При нажатии кнопок выполняется запрос на соответствующий URL.
<table>
<tr><td colspan="3" align="center"><button class="button" onmousedown="toggleCheckbox('forward');" ontouchstart="toggleCheckbox('forward');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Forward</button></td></tr>
<tr><td align="center"><button class="button" onmousedown="toggleCheckbox('left');" ontouchstart="toggleCheckbox('left');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Left</button></td><td align="center"><button class="button" onmousedown="toggleCheckbox('stop');" ontouchstart="toggleCheckbox('stop');">Stop</button></td><td align="center"><button class="button" onmousedown="toggleCheckbox('right');" ontouchstart="toggleCheckbox('right');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Right</button></td></tr>
<tr><td colspan="3" align="center"><button class="button" onmousedown="toggleCheckbox('backward');" ontouchstart="toggleCheckbox('backward');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Backward</button></td></tr>
</table>
<script>
function toggleCheckbox(x) {
var xhr = new XMLHttpRequest();
xhr.open("GET", "/action?go=" + x, true);
xhr.send();
}
window.onload = document.getElementById("photo").src = window.location.href.slice(0, -1) + ":81/stream";
</script>
Вот запросы, выполняемые в зависимости от нажатой кнопки:
Вперёд:
<ESP_IP_ADDRESS>/action?go=forward
Назад:
/action?go=backward
Влево:
/action?go=left
Вправо:
/action?go=right
Стоп:
/action?go=stop
Когда вы отпускаете кнопку, выполняется запрос на URL /action?go=stop. Робот движется только пока вы удерживаете кнопки.
Обработка запросов
Для обработки действий при получении запросов на эти URL используются операторы if…else:
if(!strcmp(variable, "forward")) {
Serial.println("Forward");
digitalWrite(MOTOR_1_PIN_1, 1);
digitalWrite(MOTOR_1_PIN_2, 0);
digitalWrite(MOTOR_2_PIN_1, 1);
digitalWrite(MOTOR_2_PIN_2, 0);
}
else if(!strcmp(variable, "left")) {
Serial.println("Left");
digitalWrite(MOTOR_1_PIN_1, 0);
digitalWrite(MOTOR_1_PIN_2, 1);
digitalWrite(MOTOR_2_PIN_1, 1);
digitalWrite(MOTOR_2_PIN_2, 0);
}
else if(!strcmp(variable, "right")) {
Serial.println("Right");
digitalWrite(MOTOR_1_PIN_1, 1);
digitalWrite(MOTOR_1_PIN_2, 0);
digitalWrite(MOTOR_2_PIN_1, 0);
digitalWrite(MOTOR_2_PIN_2, 1);
}
else if(!strcmp(variable, "backward")) {
Serial.println("Backward");
digitalWrite(MOTOR_1_PIN_1, 0);
digitalWrite(MOTOR_1_PIN_2, 1);
digitalWrite(MOTOR_2_PIN_1, 0);
digitalWrite(MOTOR_2_PIN_2, 1);
}
else if(!strcmp(variable, "stop")) {
Serial.println("Stop");
digitalWrite(MOTOR_1_PIN_1, 0);
digitalWrite(MOTOR_1_PIN_2, 0);
digitalWrite(MOTOR_2_PIN_1, 0);
digitalWrite(MOTOR_2_PIN_2, 0);
}
Тестирование кода
После ввода сетевых учётных данных вы можете загрузить код на плату ESP32-CAM. Если вы не знаете, как загрузить код на плату, прочитайте следующий урок:
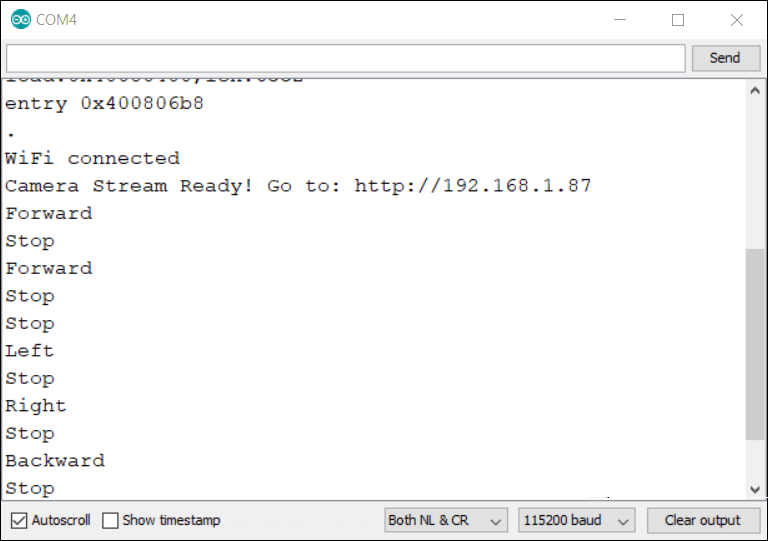
После загрузки откройте Serial Monitor, чтобы получить IP-адрес.
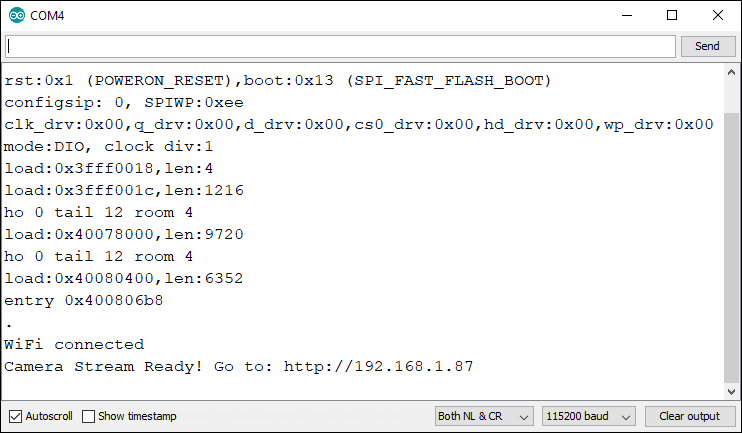
Откройте браузер и введите IP-адрес ESP. Должна загрузиться подобная веб-страница:
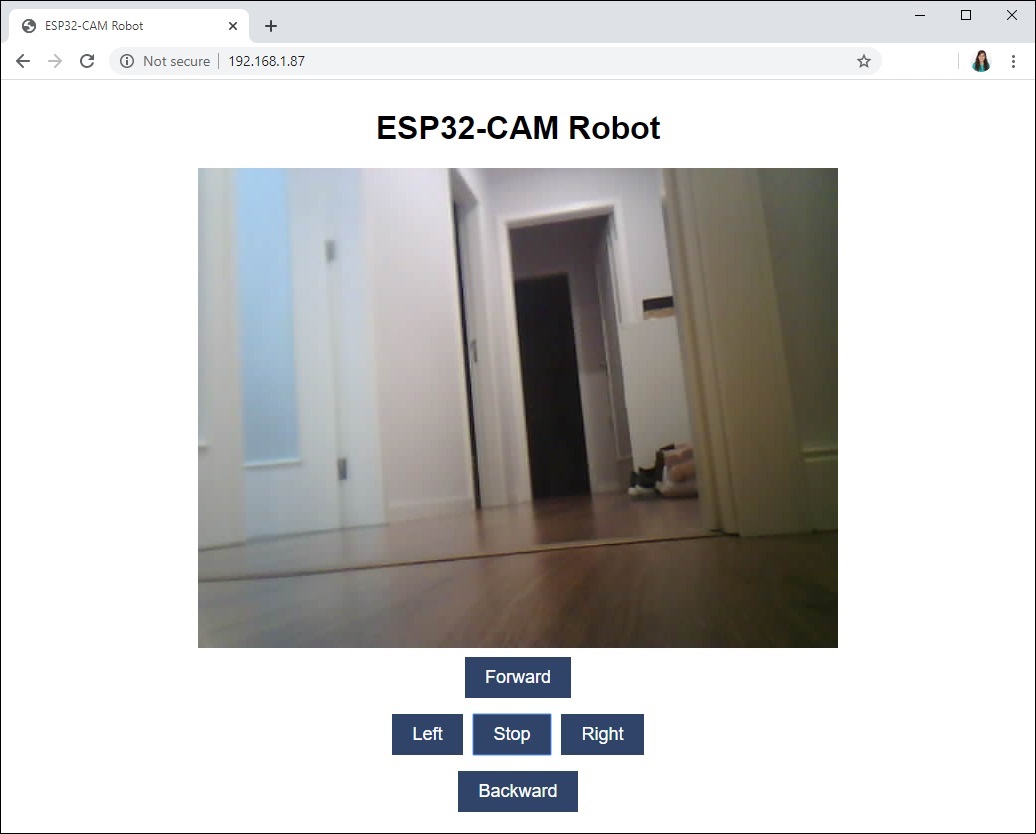
Нажмите кнопки и посмотрите в Serial Monitor, идёт ли стриминг без задержек и принимаются ли команды без сбоев.
Если всё работает правильно, пора собирать схему.
Схема подключения
После сборки шасси робота вы можете подключить компоненты по следующей схеме.
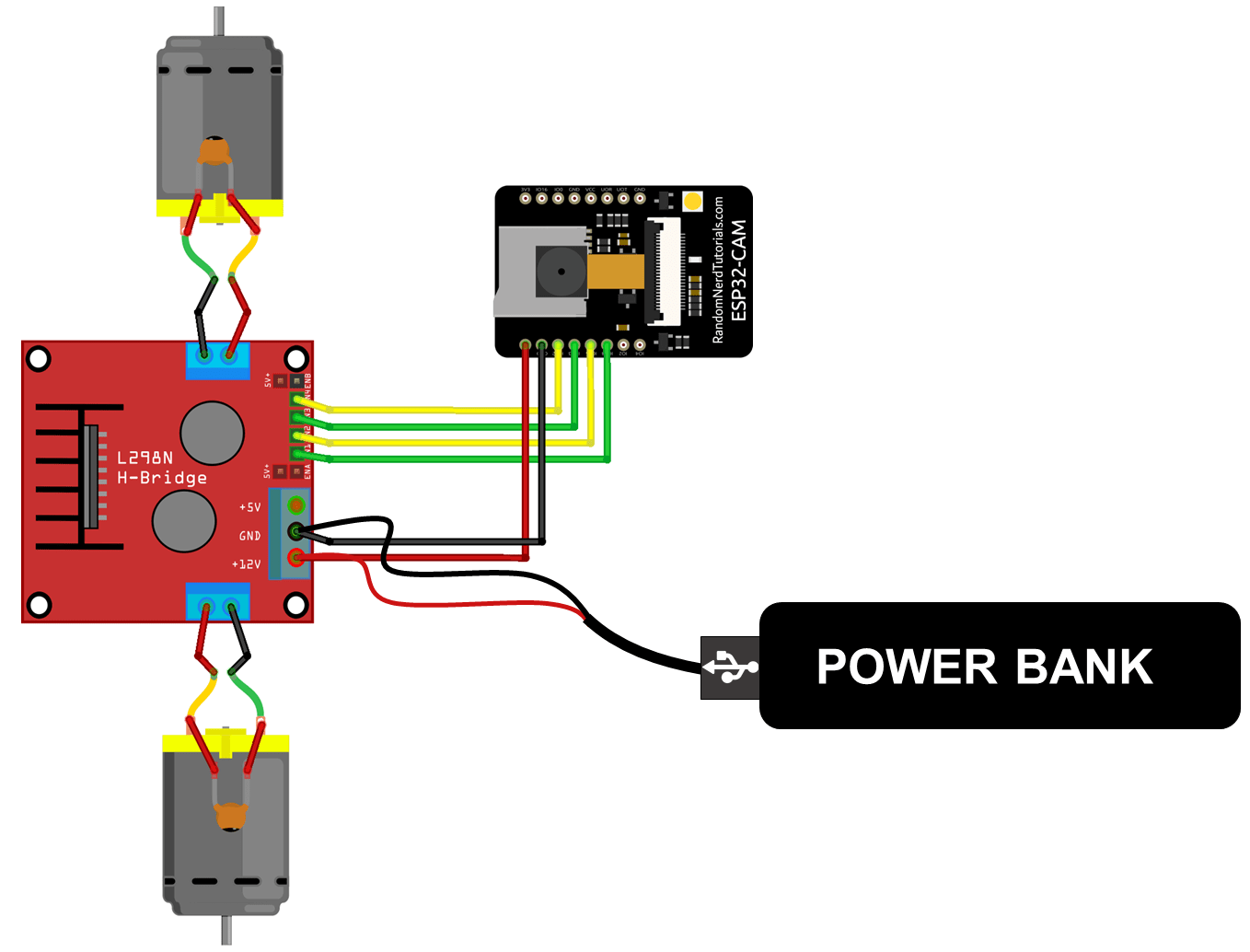
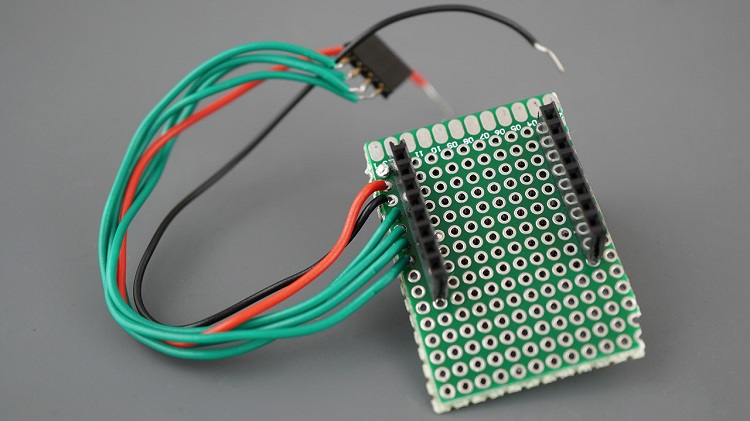
Начните с подключения ESP32-CAM к драйверу моторов, как показано на схеме. Вы можете использовать мини-макетную плату или стрипборд для размещения ESP32-CAM и сборки схемы.
В следующей таблице показаны подключения между ESP32-CAM и драйвером L298N.
L298N Motor Driver |
ESP32-CAM |
|---|---|
IN1 |
GPIO 14 |
IN2 |
GPIO 15 |
IN3 |
GPIO 13 |
IN4 |
GPIO 12 |
Мы собрали все подключения на мини-стрипборде, как показано ниже.
После этого подключите каждый мотор к его клеммной колодке.
Примечание: рекомендуем припаять керамический конденсатор ёмкостью 0,1 мкФ к положительному и отрицательному выводам каждого мотора, как показано на схеме, для сглаживания скачков напряжения. Кроме того, можно припаять ползунковый переключатель к красному проводу от PowerBank. Так вы сможете включать и выключать питание.
Наконец, подключите питание от PowerBank, как показано на схеме. Вам нужно зачистить USB-кабель. В данном примере ESP32-CAM и моторы питаются от одного источника, и это работает хорошо.
Примечание: моторы потребляют много тока, поэтому, если вы чувствуете, что робот движется недостаточно быстро, может потребоваться использовать отдельный источник питания для моторов. Это означает, что нужно два разных источника: один для DC-моторов, другой для ESP32. Для питания моторов можно использовать блок из 4 батареек AA. При покупке шасси обычно в комплекте идёт держатель для 4 батареек AA.
Ваш робот должен выглядеть примерно так:
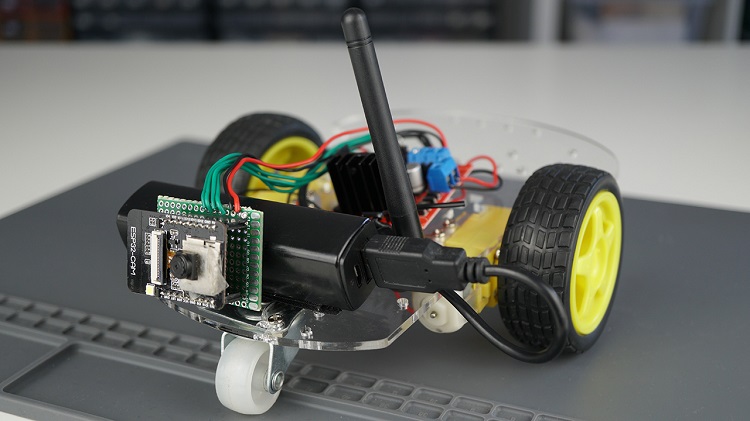
Не забудьте, что для ESP32-CAM нужно использовать внешнюю антенну, иначе веб-сервер может работать очень медленно.
Демонстрация
Откройте браузер по IP-адресу ESP32-CAM, и вы сможете управлять роботом. Веб-сервер хорошо работает на ноутбуке или смартфоне.
Веб-сервер можно открыть только на одном устройстве/вкладке одновременно.
Заключение
В этом уроке вы узнали, как собрать робот-машинку с дистанционным управлением на базе ESP32-CAM и как управлять ею через веб-сервер.
Управление DC-моторами с помощью ESP32-CAM аналогично управлению с помощью обычного ESP32. Прочитайте этот урок, чтобы узнать больше: ESP32 с DC-мотором и драйвером L298N — управление скоростью и направлением.
Если вы хотите управлять роботом за пределами вашей локальной сети, можно настроить ESP32-CAM как точку доступа. В этом случае ESP32-CAM не подключается к роутеру, а создаёт собственную Wi-Fi сеть, к которой могут подключаться ближайшие устройства, например ваш смартфон.