Как собрать контроллер моторов PicoCon
Простое руководство по сборке контроллера моторов PicoCon. Отлично подходит для роботов на Raspberry Pi!
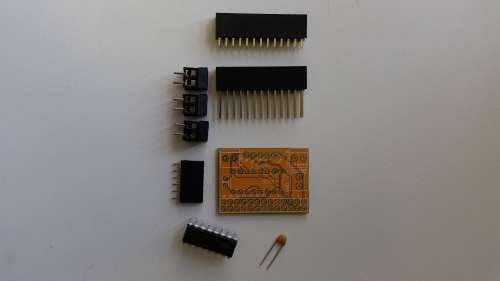
1. Разложите все компоненты
Разложите все ваши компоненты и убедитесь, что ничего не пропущено.
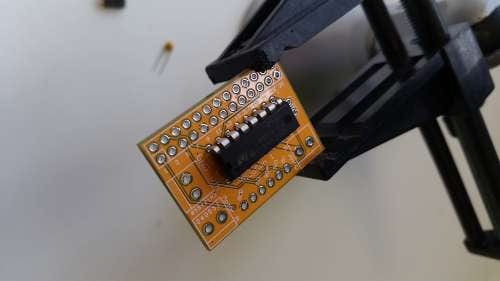
2. Припаяйте основную микросхему (IC)
Это микросхема, расположенная в центре платы. Убедитесь, что сторона с выемкой совпадает с выемкой на печатной плате. НЕ держите паяльник прижатым к выводу слишком долго, так как это может повредить микросхему. Максимум 2-3 секунды.

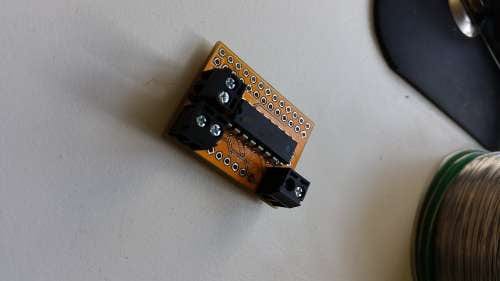
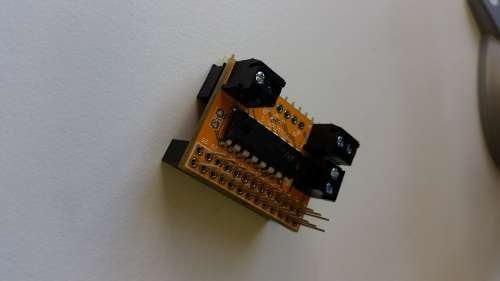
3. Установите винтовые клеммные колодки
Далее установите три винтовые клеммные колодки в печатную плату, снова убедившись, что следуете направляющим на печатной плате. Припаяйте их на место.
4. Установите и припаяйте 6-контактный разъём I2C
Установите и припаяйте 6-контактный разъём для шины I2C (очень полезен, если вы хотите подключить IP-дисплей, чтобы знать IP-адрес вашего робота).
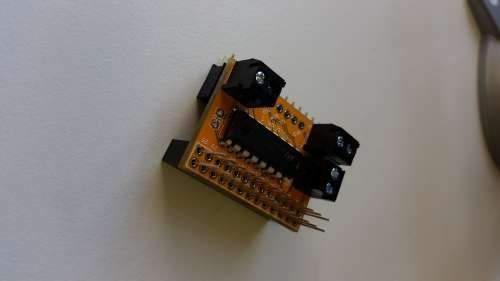
5. Припаяйте разъём GPIO на обратной стороне платы
Припаяйте разъём GPIO на обратной стороне печатной платы – это очень важно! (используйте диаграмму ниже, если потребуется)
6. Припаяйте конденсатор
И наконец, припаяйте маленький конденсатор – не имеет значения, какой стороной его устанавливать. Вуаля! Ваша плата контроллера моторов PicoCon готова к работе! Начинайте строить своего робота на Raspberry Pi!