Веб-сервер ESP8266 NodeMCU: управление двигателем постоянного тока (Arduino IDE)
В этом руководстве мы создадим веб-сервер на ESP8266 NodeMCU для удаленного управления двигателем постоянного тока. Веб-сервер будет отображать веб-страницу с кнопками для вращения мотора вперед, назад и остановки. Для управления моторами мы будем использовать драйвер двигателя L298N, а ESP8266 будет запрограммирован с помощью Arduino IDE.
Для лучшего понимания того, как работает этот проект, мы рекомендуем ознакомиться с нашим руководством по началу работы с DC-мотором и ESP8266:
Предварительные требования
Прежде чем приступить к руководству, убедитесь, что вы выполнили следующие предварительные требования.
1) Необходимые компоненты
Для выполнения этого руководства вам понадобятся следующие компоненты:
ESP8266 (читайте Сравнение лучших плат ESP8266)
Внешний источник питания для моторов – мы будем использовать 4 батарейки AA
Вы можете использовать ссылки выше или перейти на MakerAdvisor.com/tools, чтобы найти все детали для ваших проектов по лучшей цене!
2) Arduino IDE и дополнение для плат ESP8266
Мы будем программировать ESP8266 с помощью Arduino IDE. Поэтому у вас должны быть установлены платы ESP8266 в вашей Arduino IDE, если вы этого еще не сделали.
Если вы хотите использовать VS Code с расширением PlatformIO, следуйте следующему руководству, чтобы узнать, как программировать ESP8266:
3) Плагин загрузки файловой системы
Для загрузки файлов HTML и CSS, необходимых для этого проекта, в файловую систему ESP8266 (LittleFS) мы будем использовать плагин для Arduino IDE: LittleFS Filesystem uploader. Следуйте следующему руководству, чтобы установить плагин загрузки файловой системы в Arduino 2, если вы этого еще не сделали:
Если вы используете VS Code с расширением PlatformIO, прочитайте следующее руководство, чтобы узнать, как загружать файлы в файловую систему:
4) Установка библиотек
Мы создадим веб-сервер, используя следующие библиотеки:
Вы можете установить эти библиотеки с помощью Arduino Library Manager. Перейдите в Sketch > Include Library > Manage Libraries и найдите названия библиотек.
4) Схема подключения
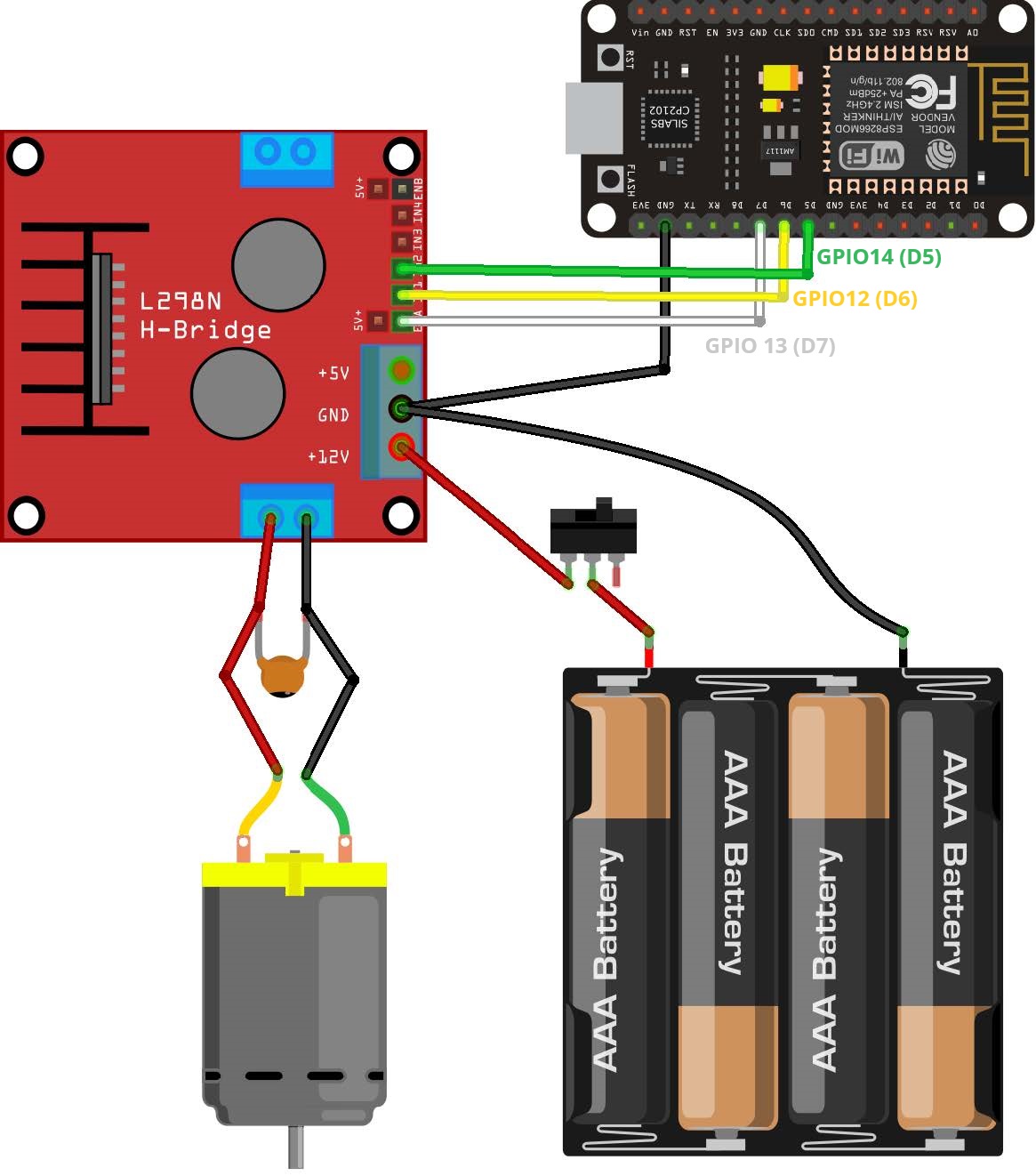
На следующей схеме показано, как подключить DC-мотор к ESP8266 с помощью драйвера L298N.
Не знакомы с драйвером L298N? Сначала ознакомьтесь с этим руководством: ESP8266 NodeMCU с DC-мотором и драйвером L298N – управление скоростью и направлением (Arduino IDE)
Мотор, которым мы будем управлять, подключен к выходным контактам мотора A, поэтому нам нужно подключить контакты ENABLEA, INPUT1 и INPUT2 драйвера к ESP8266. Следуйте приведенной ниже схеме подключения DC-мотора и драйвера L298N к ESP8266.
Input 1 |
Input 2 |
Enable |
GND |
|
|---|---|---|---|---|
LN298N Motor Driver |
Input 1 |
Input 2 |
Enable |
GND |
ESP8266 |
GPIO 12 (D6) |
GPIO 14 (D5) |
GPIO 13 (D7) |
GND |
Мы используем GPIO, указанные в таблице выше, для подключения к драйверу мотора. Вы можете использовать любые другие подходящие GPIO, при условии, что вы соответствующим образом измените код. Узнайте больше о GPIO ESP8266: Справочник по распиновке ESP8266: какие GPIO следует использовать?
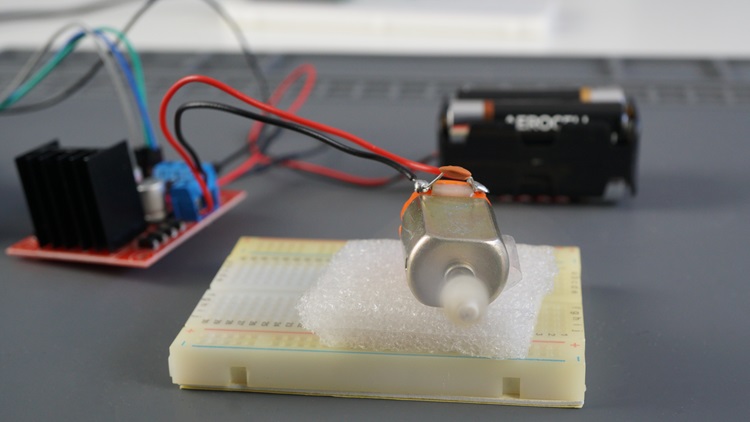
Питание драйвера LN298N
DC-мотор требует большого скачка тока для начала вращения, поэтому моторы должны питаться от внешнего источника питания, отдельного от ESP8266. В качестве примера мы используем 4 батарейки AA, но вы можете использовать любой другой подходящий источник питания. В этой конфигурации вы можете использовать источник питания напряжением от 6 В до 12 В.

Переключатель между батарейным отсеком и драйвером мотора является опциональным, но очень удобным для отключения и подачи питания. Таким образом вам не нужно постоянно подключать и отключать провода для экономии энергии.
Мы рекомендуем припаять керамический конденсатор емкостью 0,1 мкФ к положительному и отрицательному выводам DC-мотора, как показано на схеме, чтобы сгладить любые скачки напряжения. (Примечание: моторы также работают без конденсатора.)
Обзор проекта
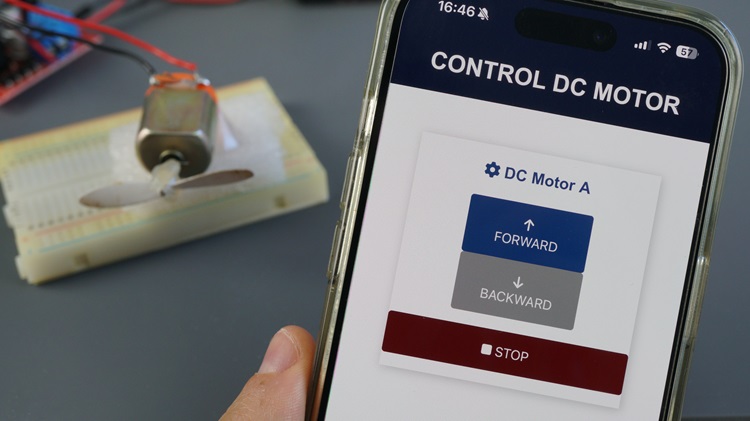
На следующем изображении показана веб-страница, которую вы создадите для этого проекта.
Веб-страница имеет три кнопки для управления DC-мотором. Каждая кнопка отправляет запрос на разный URL, чтобы ESP8266 знал, какая кнопка была нажата, и действовал соответствующим образом.
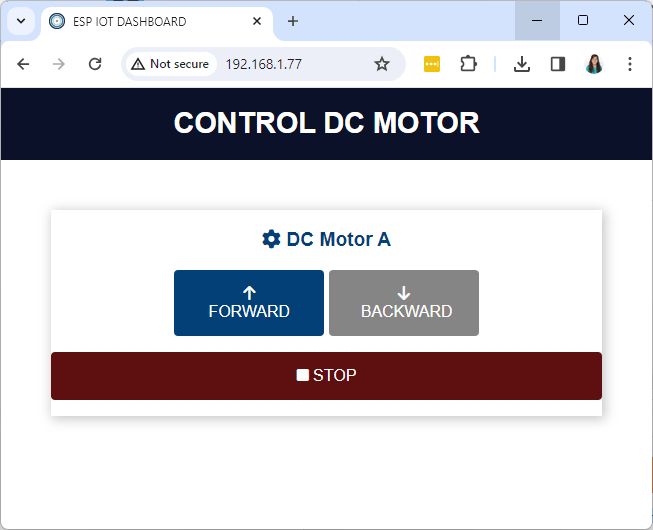
Кнопка Forward: отправляет запрос на URL /forward – мотор будет вращаться вперед
Кнопка Backward: отправляет запрос на URL /backward – мотор будет вращаться назад
Кнопка Stop: отправляет запрос на URL /stop – мотор остановится
Для создания этой веб-страницы мы создадим HTML-файл (index.html) и CSS-файл (style.css), которые будут сохранены в файловой системе ESP8266 (LittleFS).
Организация файлов
Файлы, которые вы хотите загрузить в файловую систему ESP, должны быть помещены в папку data внутри папки проекта. Мы переместим два файла в эту папку:
index.html для создания веб-страницы;
style.css для стилизации веб-страницы;
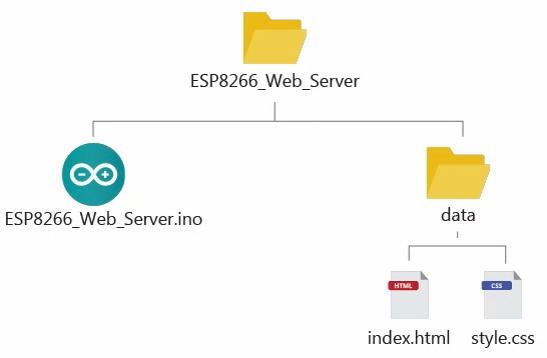
Вы должны сохранить файлы HTML, CSS и JavaScript внутри папки data в папке скетча Arduino, как показано на предыдущей схеме. Мы загрузим эти файлы в файловую систему ESP8266 (LittleFS).
Вы можете скачать все файлы проекта:
HTML-файл
Создайте файл с именем index.html со следующим содержимым:
<!DOCTYPE html>
<html>
<head>
<title>ESP IOT DASHBOARD</title>
<meta name="viewport" content="width=device-width, initial-scale=1">
<link rel="stylesheet" type="text/css" href="style.css">
<link rel="icon" type="image/png" href="favicon.png">
<script src="https://kit.fontawesome.com/0294e3a09e.js" crossorigin="anonymous"></script>
</head>
<body>
<div class="topnav">
<h1>CONTROL DC MOTOR</h1>
</div>
<div class="content">
<div class="card-grid">
<div class="card">
<p class="card-title"><i class="fa-solid fa-gear"></i> DC Motor A</p>
<p>
<a href="forward"><button class="button-on"><i class="fa-solid fa-arrow-up"></i> FORWARD</button></a>
<a href="backward"><button class="button-off"><i class="fa-solid fa-arrow-down"></i> BACKWARD</button></a>
</p>
<p>
<a href="stop"><button class="button-stop"><i class="fa-solid fa-stop"></i> STOP</button></a>
</p>
</div>
</div>
</div>
</body>
</html>
В этом HTML-файле мы создаем три кнопки, которые при нажатии отправляют запрос на разные URL.
FORWARD: /forward
BACKWARD: /backward
STOP: /stop
<p>
<a href="forward"><button class="button-on"><i class="fa-solid fa-arrow-up"></i> FORWARD</button></a>
<a href="backward"><button class="button-off"><i class="fa-solid fa-arrow-down"></i> BACKWARD</button></a>
</p>
<p>
<a href="stop"><button class="button-stop"><i class="fa-solid fa-stop"></i> STOP</button></a>
</p>
CSS-файл
Создайте файл с именем style.css со следующим содержимым для стилизации веб-страницы.
html {
font-family: Arial, Helvetica, sans-serif;
text-align: center;
}
h1 {
font-size: 1.8rem;
color: white;
}
.topnav {
overflow: hidden;
background-color: #0A1128;
}
body {
margin: 0;
}
.content {
padding: 50px;
}
.card-grid {
max-width: 800px;
margin: 0 auto;
display: grid;
grid-gap: 2rem;
grid-template-columns: repeat(auto-fit, minmax(200px, 1fr));
}
.card {
background-color: white;
box-shadow: 2px 2px 12px 1px rgba(140,140,140,.5);
}
.card-title {
font-size: 1.2rem;
font-weight: bold;
color: #034078
}
.state {
font-size: 1.2rem;
color:#1282A2;
}
button {
border: none;
color: #FEFCFB;
padding: 15px 32px;
text-align: center;
font-size: 16px;
width: 150px;
border-radius: 4px;
transition-duration: 0.4s;
}
.button-on {
background-color:#034078;
}
.button-on:hover {
background-color: #1282A2;
}
.button-off {
background-color:#858585;
}
.button-off:hover {
background-color: #252524;
}
.button-stop {
background-color:#5e0f0f;
width: 100%;
}
.button-stop:hover {
background-color: #9b332c;
}
Веб-сервер ESP8266: управление DC-мотором – скетч Arduino
Следующий код создает веб-сервер, который обслуживает веб-страницу, созданную ранее, для удаленного управления DC-мотором через веб-браузер в локальной сети.
/*********
Rui Santos & Sara Santos - Random Nerd Tutorials
Complete instructions at https://RandomNerdTutorials.com/esp8266-nodemcu-web-server-dc-motor-arduino/
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files.
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
*********/
#include <Arduino.h>
#include <ESP8266WiFi.h>
#include <ESPAsyncTCP.h>
#include <ESPAsyncWebServer.h>
#include <LittleFS.h>
// Motor A pins
int motor1Pin1 = 12;
int motor1Pin2 = 14;
int enable1Pin = 13;
// Replace with your network credentials
const char* ssid = "REPLACE_WITH_YOUR_SSID";
const char* password = "REPLACE_WITH_YOUR_PASSWORD";
// Create AsyncWebServer object on port 80
AsyncWebServer server(80);
// Initialize LittleFS
void initFS() {
if (!LittleFS.begin()) {
Serial.println("An error has occurred while mounting LittleFS");
}
else {
Serial.println("LittleFS mounted successfully");
}
}
void initWiFi() {
WiFi.mode(WIFI_STA);
WiFi.begin(ssid, password);
Serial.println("Connecting to WiFi ..");
while (WiFi.status() != WL_CONNECTED) {
Serial.print('.');
delay(1000);
}
Serial.println(WiFi.localIP());
}
void moveForward(){
Serial.println("Moving Forward");
digitalWrite(enable1Pin, HIGH);
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
}
void moveBackward(){
Serial.println("Moving Backward");
digitalWrite(enable1Pin, HIGH);
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
}
void stopMotor(){
digitalWrite(enable1Pin, LOW);
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
}
void setup() {
Serial.begin(115200);
// Set motor pins as outputs
pinMode(motor1Pin1, OUTPUT);
pinMode(motor1Pin2, OUTPUT);
pinMode(enable1Pin, OUTPUT);
initWiFi();
initFS();
server.on("/", HTTP_GET, [](AsyncWebServerRequest *request){
request->send(LittleFS, "/index.html", "text/html");
});
server.serveStatic("/", LittleFS, "/");
server.on("/forward", HTTP_GET, [](AsyncWebServerRequest *request) {
moveForward();
request->send(LittleFS, "/index.html", "text/html", false);
});
server.on("/backward", HTTP_GET, [](AsyncWebServerRequest *request) {
moveBackward();
request->send(LittleFS, "/index.html", "text/html", false);
});
server.on("/stop", HTTP_GET, [](AsyncWebServerRequest *request) {
stopMotor();
request->send(LittleFS, "/index.html", "text/html", false);
});
server.begin();
}
void loop() {
}
Вам нужно только вставить ваши сетевые учетные данные и загрузить образ файловой системы, и код сразу заработает.
const char* ssid = "REPLACE_WITH_YOUR_SSID";
const char* password = "REPLACE_WITH_YOUR_SSID";
Как работает код
Продолжайте читать, чтобы узнать, как работает код, или перейдите к разделу Демонстрация.
Подключение библиотек
Сначала подключите необходимые библиотеки для подключения к Wi-Fi, создания веб-сервера и использования файловой системы LittleFS.
#include <Arduino.h>
#include <ESP8266WiFi.h>
#include <ESPAsyncTCP.h>
#include <ESPAsyncWebServer.h>
#include <LittleFS.h>
Контакты мотора
Определите GPIO, которые будут управлять мотором.
// Motor A pins
int motor1Pin1 = 12;
int motor1Pin2 = 14;
int enable1Pin = 13;
Сетевые учетные данные
Вставьте ваши сетевые учетные данные в следующие переменные, чтобы ESP8266 мог подключиться к вашей сети.
// Replace with your network credentials
const char* ssid = "REPLACE_WITH_YOUR_SSID";
const char* password = "REPLACE_WITH_YOUR_SSID";
Создание объекта сервера
Создайте объект AsyncWebServer с именем server на порту 80.
AsyncWebServer server(80);
Инициализация LittleFS
Следующая функция initFS() инициализирует файловую систему LittleFS. Мы вызовем её позже в setup().
void initFS() {
if (!LittleFS.begin()) {
Serial.println("An error has occurred while mounting LittleFS");
}
else {
Serial.println("LittleFS mounted successfully");
}
}
Инициализация Wi-Fi
Функция initWiFi() подключается к Wi-Fi, используя SSID и пароль, которые вы определили ранее.
void initWiFi() {
WiFi.mode(WIFI_STA);
WiFi.begin(ssid, password);
Serial.println("Connecting to WiFi ..");
while (WiFi.status() != WL_CONNECTED) {
Serial.print('.');
delay(1000);
}
Serial.println(WiFi.localIP());
}
Функции управления DC-мотором
Мы создаем три функции для управления DC-мотором.
Функция moveForward() будет вращать мотор вперед.
void moveForward(){
Serial.println("Moving Forward");
digitalWrite(enable1Pin, HIGH);
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
}
Функция moveBackward() вращает мотор назад.
void moveBackward(){
Serial.println("Moving Backward");
digitalWrite(enable1Pin, HIGH);
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
}
Наконец, функция stopMotor() останавливает мотор, устанавливая все контакты мотора в LOW.
void stopMotor(){
Serial.print("Motor Stopped")
digitalWrite(enable1Pin, LOW);
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
}
setup()
В setup() инициализируйте Serial Monitor для отладки.
Serial.begin(115200);
Установите контакты мотора как выходы.
// Set motor pins as outputs
pinMode(motor1Pin1, OUTPUT);
pinMode(motor1Pin2, OUTPUT);
pinMode(enable1Pin, OUTPUT);
Инициализируйте Wi-Fi, вызвав функцию initWiFi().
initWiFi();
Инициализируйте файловую систему LittleFS, вызвав функцию initFS(), которую мы создали ранее.
initFS();
Обработка запросов
Затем настройте веб-сервер. Когда вы получаете запрос на корневой (/) URL – это происходит, когда вы обращаетесь к IP-адресу ESP – отправьте HTML-текст для создания веб-страницы:
server.on("/", HTTP_GET, [](AsyncWebServerRequest *request){
request->send(LittleFS, "/index.html", "text/html");
});
Когда HTML-файл загружается в вашем браузере, он отправляет запрос на CSS-файл. Это статический файл, сохраненный в том же каталоге (LittleFS). Поэтому мы можем просто добавить следующую строку для обслуживания файлов в каталоге по запросу корневого URL – таким образом, CSS-файл будет обслуживаться автоматически.
server.serveStatic("/", LittleFS, "/");
Когда вы нажимаете кнопку Forward, вы отправляете запрос по пути /forward. Когда ESP8266 получает этот запрос, он вызывает функцию moveForward(), чтобы заставить мотор вращаться вперед.
server.on("/forward", HTTP_GET, [](AsyncWebServerRequest *request) {
moveForward();
request->send(LittleFS, "/index.html", "text/html", false);
});
Аналогично, когда вы нажимаете кнопку Backward, ESP8266 получает запрос по пути /backward. Когда это происходит, вызывается функция moveBackward(), чтобы заставить мотор вращаться в другом направлении.
server.on("/backward", HTTP_GET, [](AsyncWebServerRequest *request) {
moveBackward();
request->send(LittleFS, "/index.html", "text/html", false);
});
Когда вы нажимаете кнопку Stop, ESP8266 получает запрос по пути /stop и вызывает функцию stopMotor().
server.on("/stop", HTTP_GET, [](AsyncWebServerRequest *request) {
stopMotor();
request->send(LittleFS, "/index.html", "text/html", false);
});
Инициализация сервера
Наконец, вызовите метод begin() на объекте server для инициализации сервера.
server.begin();
Загрузка кода и файлов
После ввода ваших сетевых учетных данных сохраните код. Перейдите в Sketch > Show Sketch Folder и создайте папку с именем data.
Внутри этой папки вы должны сохранить файлы HTML и CSS.
Загрузка файлов в файловую систему
Сохранив файлы HTML и CSS в папке data, вы можете загрузить их на плату. Убедитесь, что у вас установлен плагин загрузки файловой системы.
Выберите плату ESP8266, которую вы используете (Tools > Board), и выберите правильный COM-порт (Tools > Port).
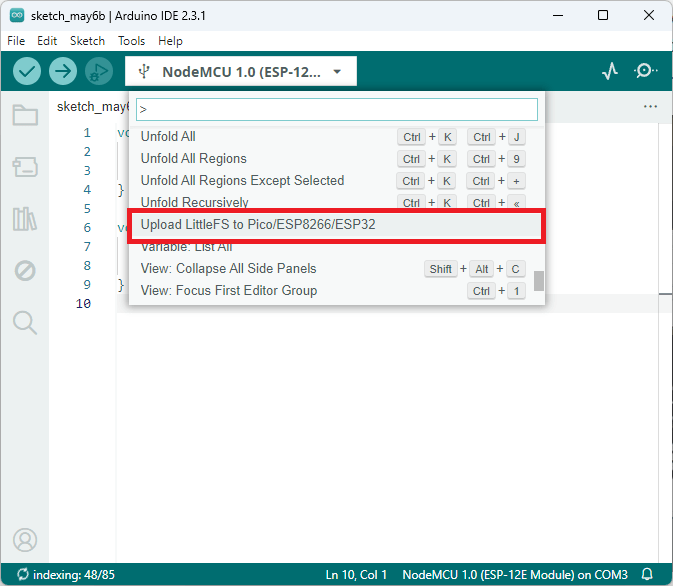
Затем загрузите файлы на плату ESP8266. Нажмите [Ctrl] + [Shift] + [P] в Windows или [Cmd] + [Shift] + [P] в MacOS, чтобы открыть палитру команд. Найдите Upload LittleFS to Pico/ESP8266/ESP32 и нажмите на нее.
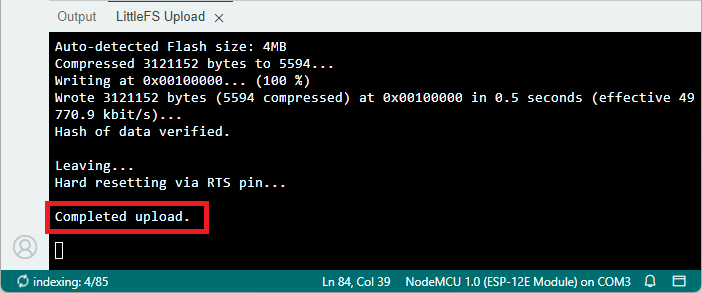
Важно: убедитесь, что Serial Monitor закрыт. В противном случае загрузка не удастся.
После нескольких секунд вы должны получить сообщение «Completed upload.». Файлы были успешно загружены в файловую систему ESP8266.
Загрузка кода
Затем загрузите код на плату ESP8266 (убедитесь, что вы добавили ваши сетевые учетные данные в код).

Демонстрация
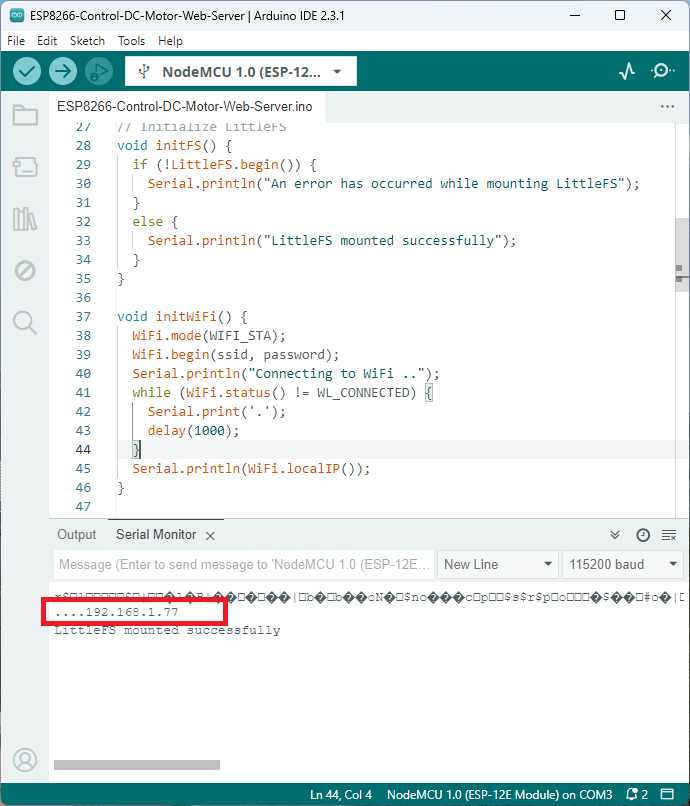
Когда все успешно загружено, откройте Serial Monitor на скорости 115200 бод.
Нажмите кнопку RST на ESP8266, и он должен вывести IP-адрес ESP8266.
Подключив мотор к ESP8266 через драйвер L298N и подав питание от внешнего источника, откройте любой браузер в вашей локальной сети и введите IP-адрес ESP8266. Загрузится следующая веб-страница.
Нажимайте на кнопки для управления DC-мотором.
Сервер может обрабатывать несколько клиентов одновременно. Вы также можете управлять DC-мотором со своего смартфона, при условии, что он подключен к вашей локальной сети.
Заключение
В этом руководстве вы узнали, как создать простой асинхронный веб-сервер на ESP8266 для удаленного управления DC-мотором с компьютера или смартфона. Теперь вы можете расширить этот проект для управления большим количеством моторов или другими выходами, или даже для отображения показаний датчиков. Вы можете ознакомиться со следующими руководствами:
Веб-сервер ESP8266: отображение показаний датчиков в виде индикаторов
Веб-сервер ESP8266: управление шаговым двигателем (WebSocket)
Веб-сервер ESP8266 (WebSocket) с несколькими слайдерами: управление яркостью светодиодов (PWM)
Если вы хотите узнать больше о создании веб-серверов с ESP8266 с нуля, мы рекомендуем ознакомиться с нашей эксклюзивной электронной книгой:
Спасибо за чтение.