Проект 3: Движение по квадрату
Введение
Первый автономный режим! 🤖
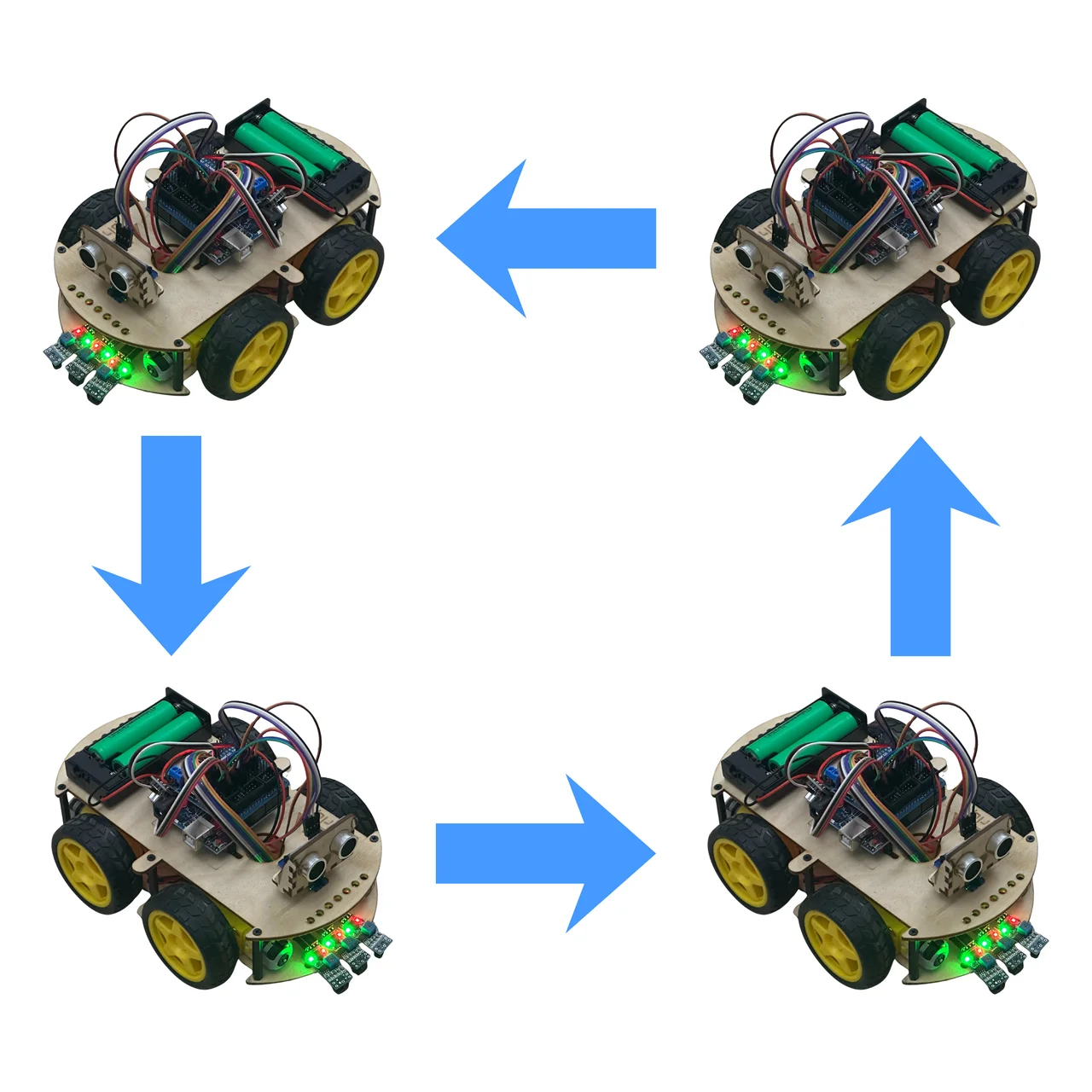
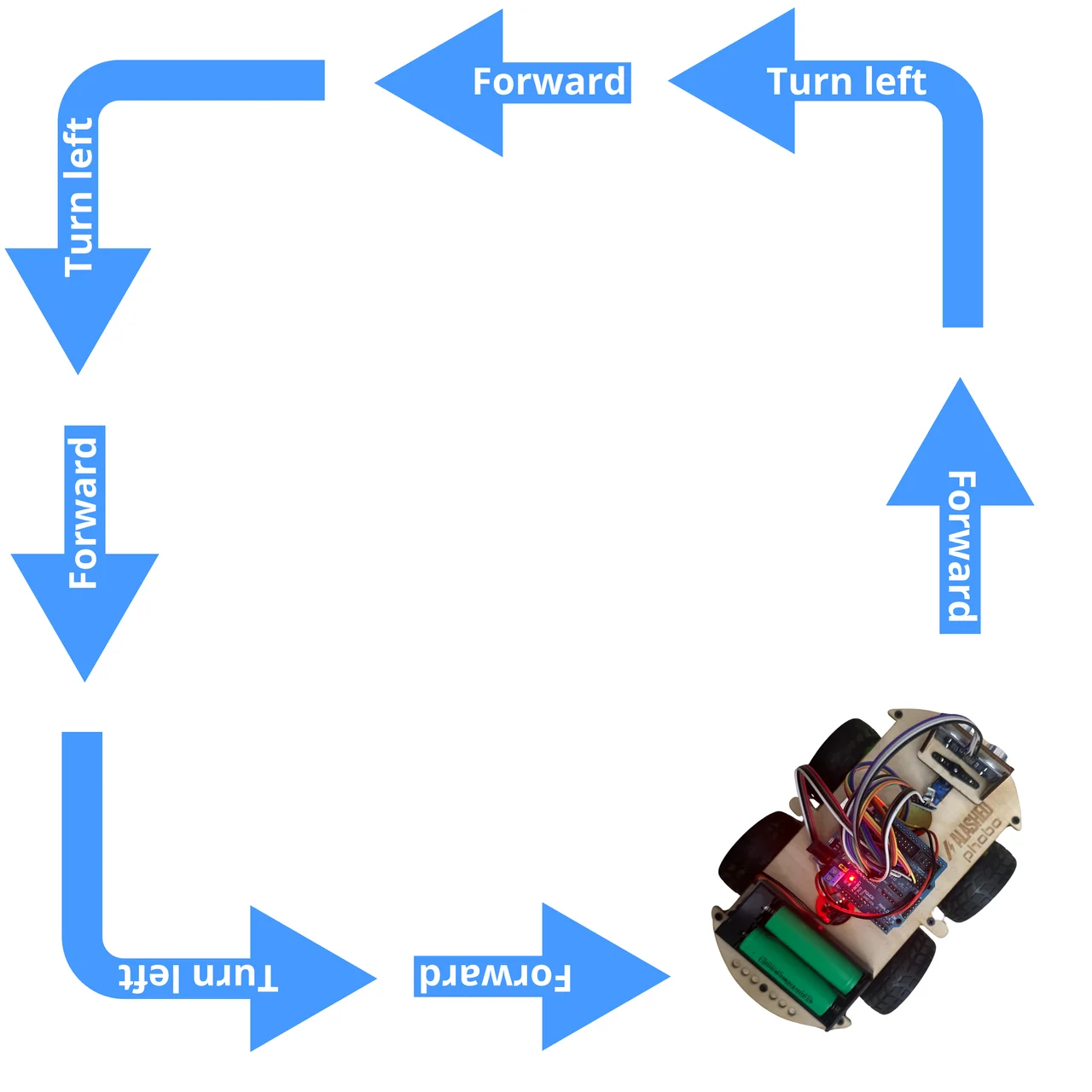
Робот Фобо сам поедет по квадрату: вперёд → поворот 90° → вперёд → поворот → 4 раза и вернётся примерно на старт!
Вариант 1: Простой код (на таймерах)
Этот код использует функции из Проекта 2. Можно менять время для калибровки.
/*
* Проект 3: Движение по квадрату
* Простой вариант на таймерах
* Использует функции из Проекта 2
*/
// Пины моторов (из Проекта 2)
const int IN1 = 4; // Motor A (правые моторы)
const int IN2 = 2;
const int IN3 = 8; // Motor B (левые моторы)
const int IN4 = 12;
const int ENA = 5; // PWM правых моторов
const int ENB = 6; // PWM левых моторов
// Калибровочные скорости из Проекта 2
int speedLeft = 200; // Скорость левых моторов (Motor B)
int speedRight = 180; // Скорость правых моторов (Motor A)
// Времена движения (можно менять для калибровки!)
int turnTime90 = 500; // Время для поворота на 90° (мс)
int moveTime = 2000; // Время для проезда стороны (мс)
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
Serial.begin(9600);
Serial.println("Робот Фобо: Движение по квадрату");
Serial.println("Старт через 3 секунды!");
delay(3000);
}
// Движение вперёд (из Проекта 2)
void moveForward() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENA, speedRight); // Правые моторы
analogWrite(ENB, speedLeft); // Левые моторы
}
// Поворот налево (из Проекта 2)
void turnLeft() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW); // Правые моторы вперёд
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH); // Левые моторы назад
analogWrite(ENA, speedRight);
analogWrite(ENB, speedLeft);
}
// Остановка моторов
void stopMotors() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
analogWrite(ENA, 0);
analogWrite(ENB, 0);
}
void loop() {
Serial.println("\n--- Квадрат ---");
// 4 стороны квадрата
for (int side = 1; side <= 4; side++) {
Serial.print("Сторона ");
Serial.println(side);
moveForward();
delay(moveTime);
stopMotors();
delay(300);
turnLeft();
delay(turnTime90);
stopMotors();
delay(500);
}
Serial.println("✓ Готово!\n");
delay(10000); // Пауза 10 секунд перед следующим циклом
}
Как калибровать:
Если робот проезжает слишком мало/много — измените
moveTime(больше = дальше)Если поворот не 90° — измените
turnTime90(больше = больше угол)Если едет по дуге — вернитесь к Проекту 2, настройте
speedLeftиspeedRight
Вариант 2: С библиотекой
С AlashMotorControlLite (установка см. Проект 2):
Код:
/*
* Проект 3: Движение по квадрату
* С библиотекой AlashMotorControlLite
* Конфигурация из Проекта 2
*/
#include <AlashMotorControlLite.h>
// Создаём объекты моторов (конфигурация из Проекта 2)
// Left motor (Motor B): IN3=D8, IN4=D12, ENB=D6
// Right motor (Motor A): IN1=D4, IN2=D2, ENA=D5
AlashMotorControlLite motorLeft(DIR_DIR_PWM, 8, 12, 6);
AlashMotorControlLite motorRight(DIR_DIR_PWM, 4, 2, 5);
// Параметры движения
int speed = 80; // Скорость: -100...100
int turnTime = 500; // Время поворота на 90° (мс)
int moveTime = 2000; // Время движения вперёд (мс)
void setup() {
Serial.begin(9600);
Serial.println("Робот Фобо: Квадрат (с библиотекой)");
Serial.println("Старт через 3 секунды!");
delay(3000);
}
// Движение вперёд
void moveForward() {
motorLeft.setSpeed(speed);
motorRight.setSpeed(speed);
}
// Поворот налево (правые вперёд, левые назад)
void turnLeft() {
motorLeft.setSpeed(-speed); // Левые назад
motorRight.setSpeed(speed); // Правые вперёд
}
// Остановка моторов
void stopMotors() {
motorLeft.stop();
motorRight.stop();
}
void loop() {
Serial.println("\n--- Квадрат ---");
// 4 стороны квадрата
for (int i = 0; i < 4; i++) {
Serial.print("Сторона ");
Serial.println(i + 1);
moveForward();
delay(moveTime);
stopMotors();
delay(300);
turnLeft();
delay(turnTime);
stopMotors();
delay(500);
}
Serial.println("✓ Готово!\n");
delay(10000); // Пауза 10 секунд перед следующим циклом
}
Загрузка и тест
Загрузите код (без батарей!)
Найдите свободное место 2×2 метра
Поставьте робота, включите питание (старт через 3 сек!)
Робот проедет квадрат и вернётся примерно на старт (±10-20 см — норма для таймеров)
Эксперименты
1. Маленький квадрат
Уменьшите время: moveTime = 1000; (половина времени = половина расстояния)
2. Прямоугольник
// Длинная сторона
moveForward(); delay(moveTime); stopMotors(); delay(300);
turnLeft(); delay(turnTime90); stopMotors(); delay(500);
// Короткая сторона
moveForward(); delay(moveTime / 2); stopMotors(); delay(300);
turnLeft(); delay(turnTime90); stopMotors(); delay(500);
// Повторить 2 раза
3. Треугольник
Измените поворот на 120°: delay(turnTime90 * 4 / 3);
Сделайте 3 стороны вместо 4:
for (int i = 0; i < 3; i++) {
moveForward(); delay(moveTime); stopMotors(); delay(300);
turnLeft(); delay(turnTime90 * 4 / 3); stopMotors(); delay(500);
}
4. Восьмёрка
Два круга: левый + правый. Для круга — 8 поворотов по 45° (turnTime90 / 2).
Поиск неисправностей
Робот не вернулся на старт: Подберите moveTime или turnTime90. Ошибка ±15 см — нормально для таймеров.
Робот едет по дуге: Откалибруйте моторы (см. Проект 2).
Разные поверхности: На ковре/линолеуме разное трение — подберите свои значения.
Заключение
🎉 Первый автономный режим готов! Сохраните откалиброванные значения — пригодятся в следующих проектах.
Что дальше: Проект 4 (сервопривод), Проект 5 (ультразвуковой датчик), Проект 6 (следование за рукой).