Проект 1: Сборка робота Фобо
Введение
Добро пожаловать в первый проект! 🎉
В предыдущих уроках мы познакомились с набором робота и установили Arduino IDE. Теперь пришло время собрать робота Фобо — двухъярусную образовательную платформу, на которой мы будем учиться программировать автономные алгоритмы!
Что мы будем делать в этом проекте?
Мы полностью соберём механическую и электронную часть робота:
Установим 4 DC мотора с колёсами на деревянное шасси
Закрепим двухъярусную конструкцию
Установим все датчики: ультразвуковой, линейные, ИК-приёмник
Подключим драйвер моторов L298N
Установим Bluetooth модуль HM-10
Смонтируем Arduino Uno с Sensor Shield V5
Подключим питание от 2×18650 аккумуляторов
Организуем всю проводку
Почему робот называется Фобо?
Название происходит от слова «фобия» (φόβος — страх). В следующих 14 проектах робот Фобо научится «бояться» всего вокруг:
🚧 Боится столкновений — будет объезжать препятствия (Проект 7)
⬛ Боится сойти с линии — будет следовать по чёрной траектории (Проект 9)
👋 Боится потерять объект — будет следовать за рукой (Проект 6)
📡 Боится потерять связь — будет управляться по Bluetooth (Проект 13)
Предупреждение
Сборка займёт 3-4 часа. Не торопитесь! В этом проекте 66 фотографий — следуйте инструкциям пошагово и проверяйте каждое подключение.
Опасно
НЕ вставляйте батареи до конца сборки! Подключайте их только после полной проверки всех соединений в Шаге 20.
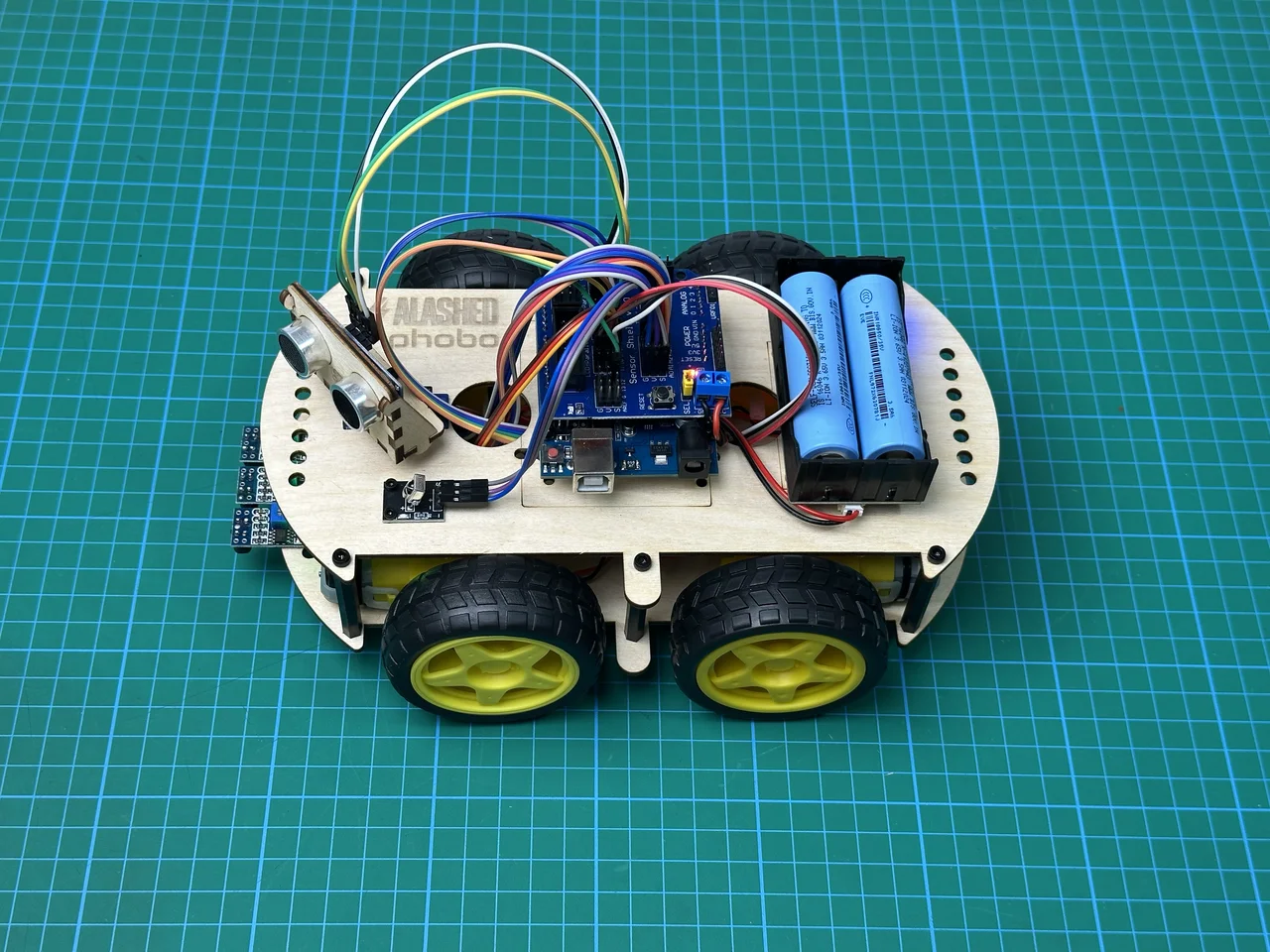
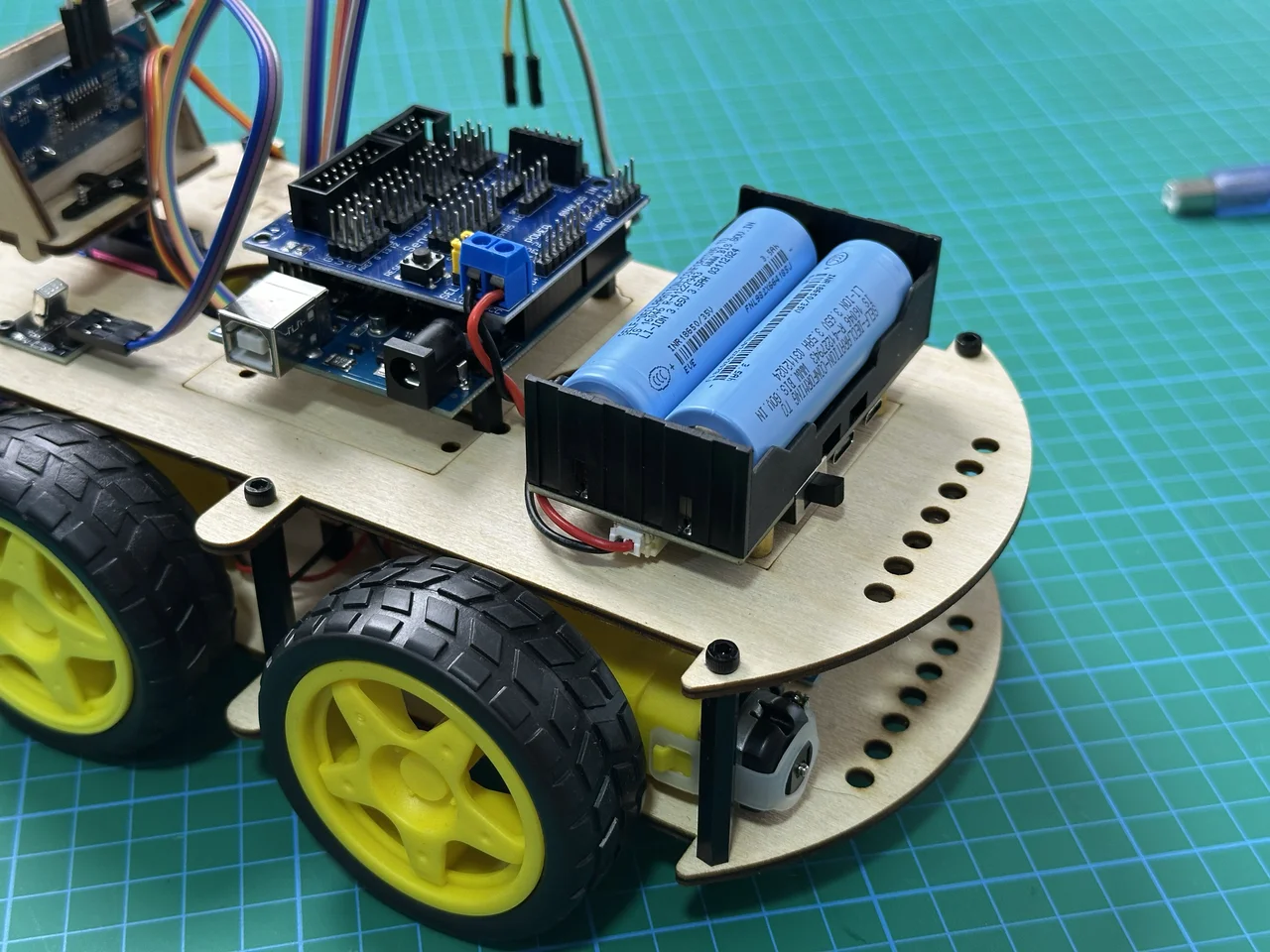
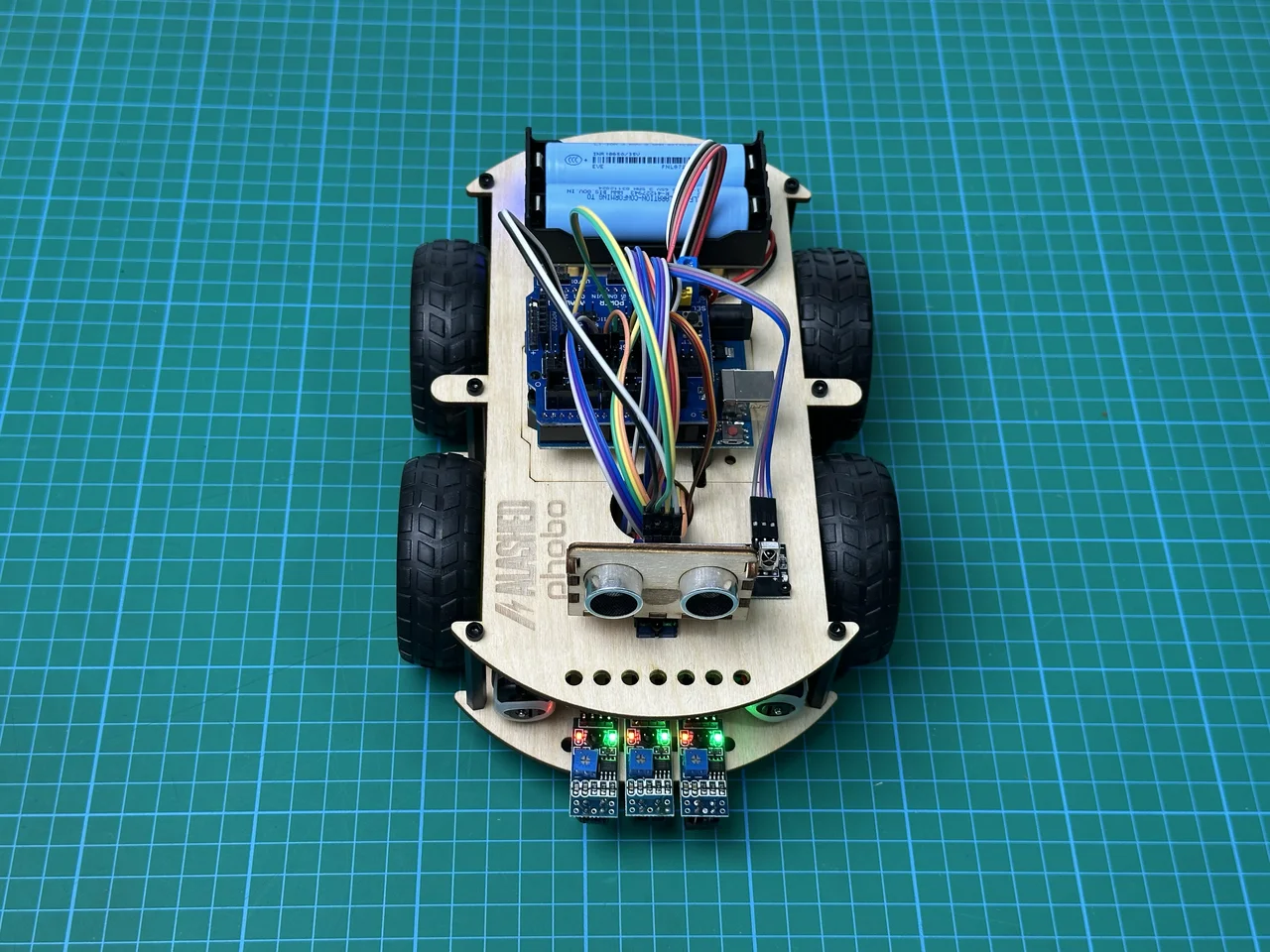
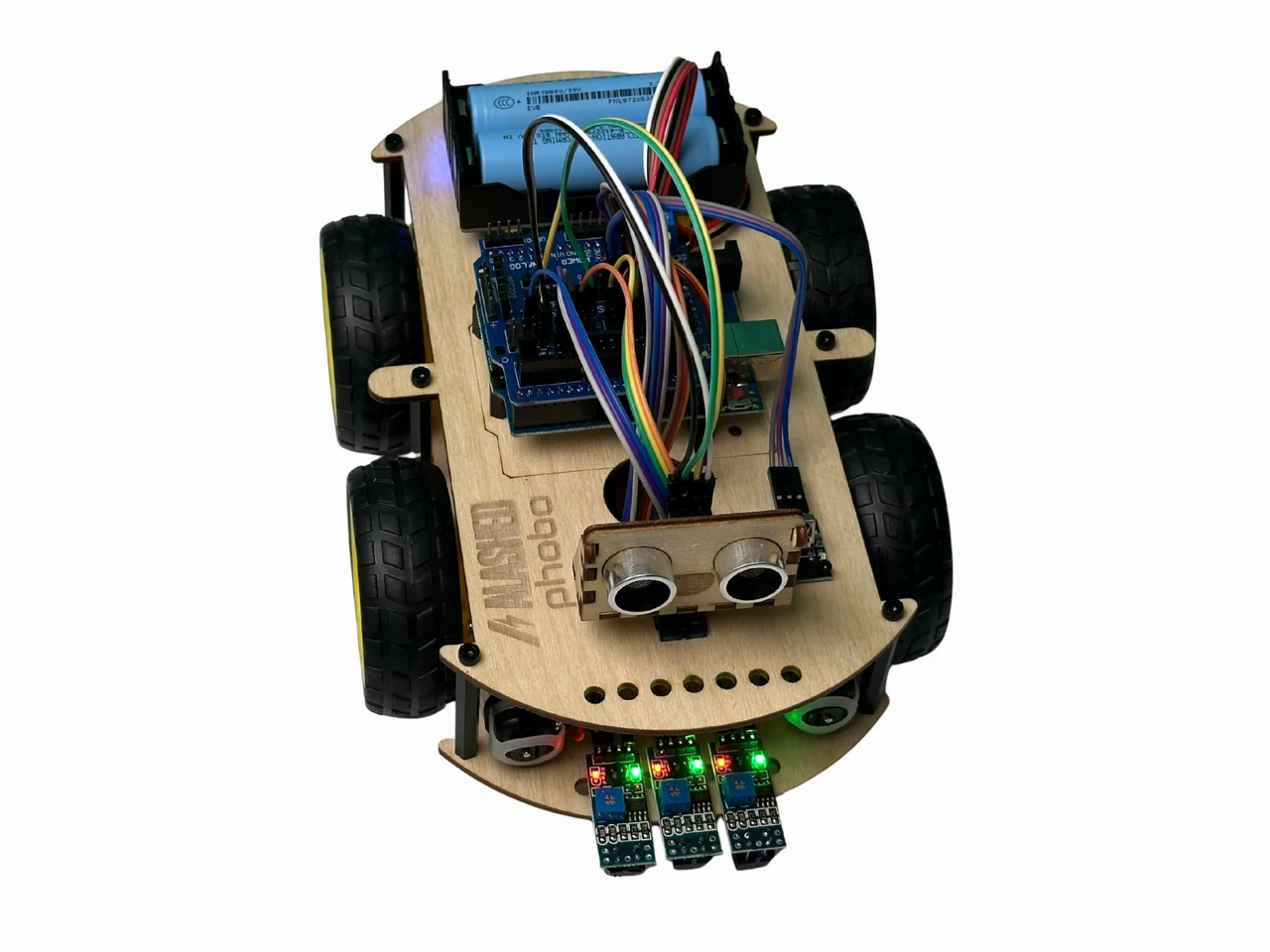
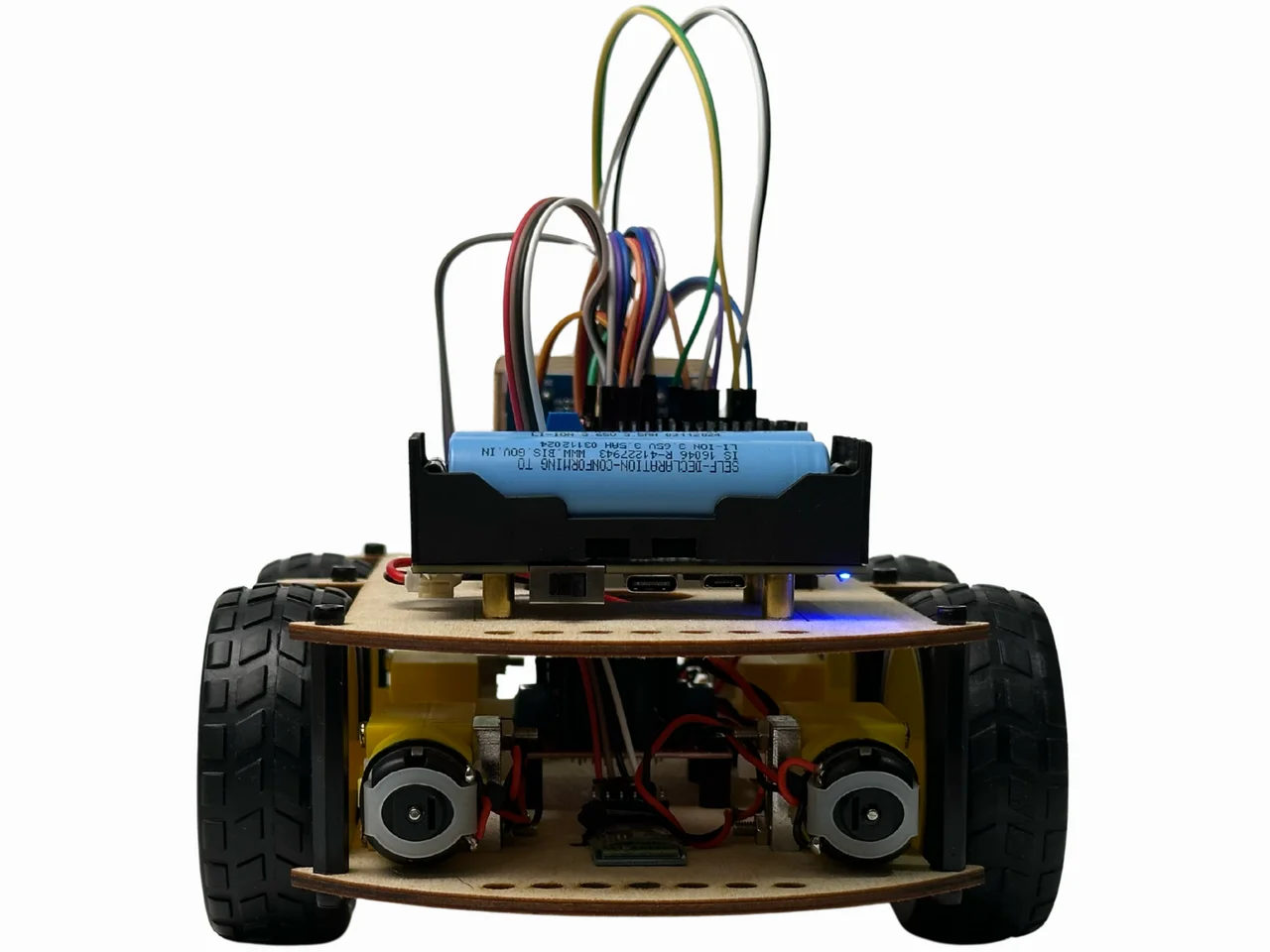
О роботе Фобо
Двухъярусная конструкция
Робот Фобо имеет двухъярусную конструкцию (два деревянных этажа):
Нижний ярус (Floor 1):
4 жёлтых DC мотора с колёсами (по углам платформы)
3 аналого-цифровых датчика линии (спереди, снизу, смотрят на поверхность)
L298N драйвер моторов (H-bridge, управление 4 моторами)
HM-10 Bluetooth 4.0 BLE модуль (сзади)
Верхний ярус (Floor 2):
Батарейный отсек 2×18650 Li-ion (7.4-8.4V, сзади)
Arduino Uno R3 с Sensor Shield V5 (центр)
Сервопривод SG92R 9g (спереди, поворачивает голову)
RCWL-9610A ультразвуковой датчик (на сервоприводе, сканирует 180°)
VS1838B ИК-приёмник (спереди сверху, для пульта)
Расстояние между ярусами: 40 мм (нейлоновые стойки)
Технические характеристики
Механика:
Шасси: 2-ярусное, лазерная резка фанеры 3 мм
Размеры: ~150×120×80 мм (Д×Ш×В)
Колёсная база: 4 колеса, полный привод (4WD)
Масса: ~350-400 г с батареями
Электроника:
Контроллер: Arduino Uno R3 (ATmega328P)
Расширение: Sensor Shield V5 (упрощает подключение датчиков)
Драйвер моторов: L298N (2 канала, 2A на канал)
Питание: 2×18650 Li-ion (7.4-8.4V, ~2000-3500 mAh)
Встроенный регулятор: L298N 5V output → Arduino + датчики
Датчики:
Дальномер: RCWL-9610A (3-500 см, GPIO режим)
Линия: 3× аналого-цифровые ИК-датчики
ИК-пульт: VS1838B (NEC протокол, 38 kHz)
Позиционирование: SG92R servo (180° сканирование)
Связь:
Bluetooth: HM-10 BLE 4.0 (CC2541, iOS+Android)
USB: CH340G или ATmega16U2 (для программирования)
Режимы работы (будут реализованы в Проектах 2-14):
Ручное управление (Bluetooth/IR)
Следование за рукой
Объезд препятствий
Следование по линии
Мастер-режим (все режимы вместе)
Что входит в набор

Распакуйте коробку:
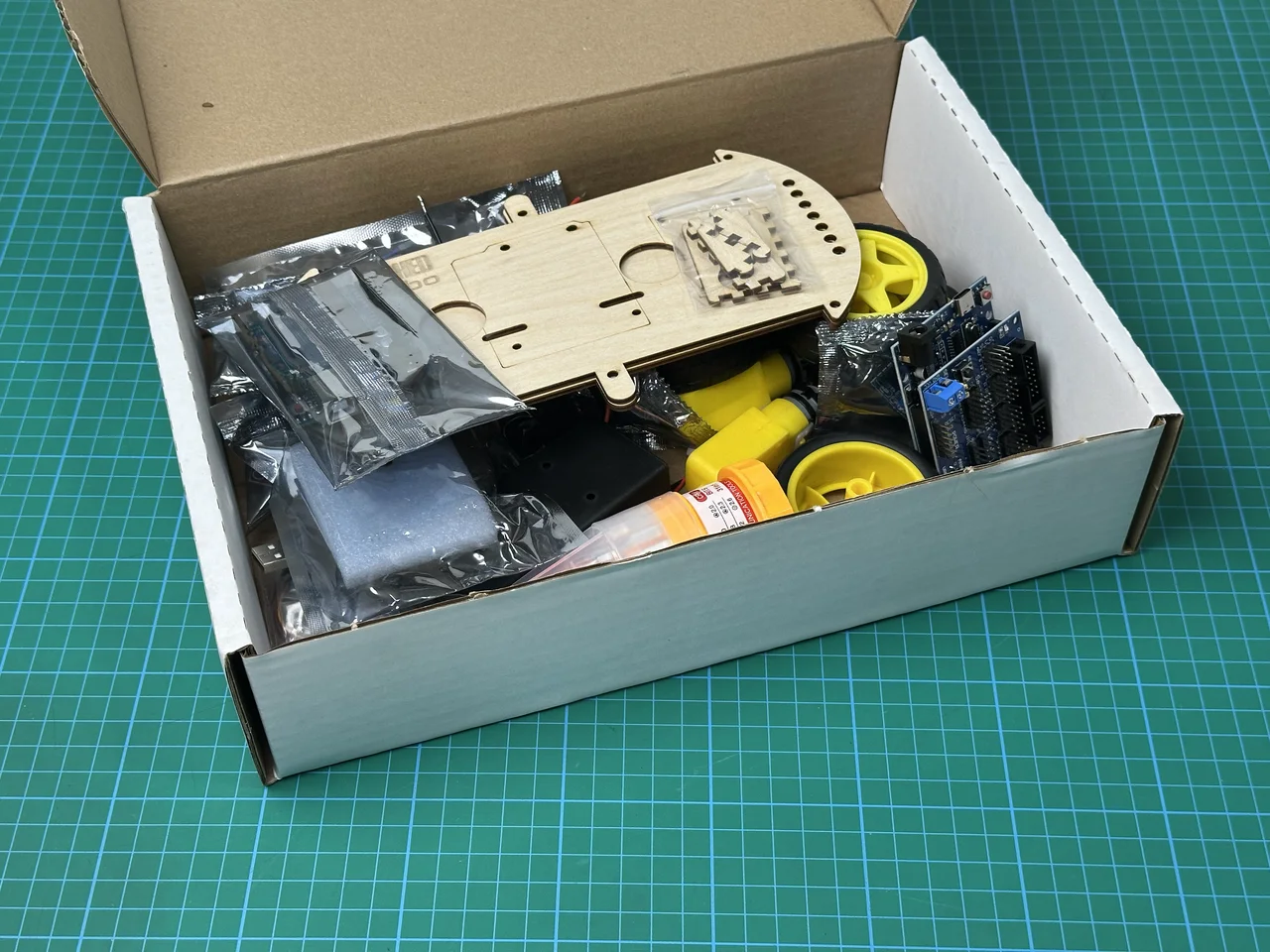
Извлеките компоненты в антистатических пакетах:

Распакуйте все компоненты:
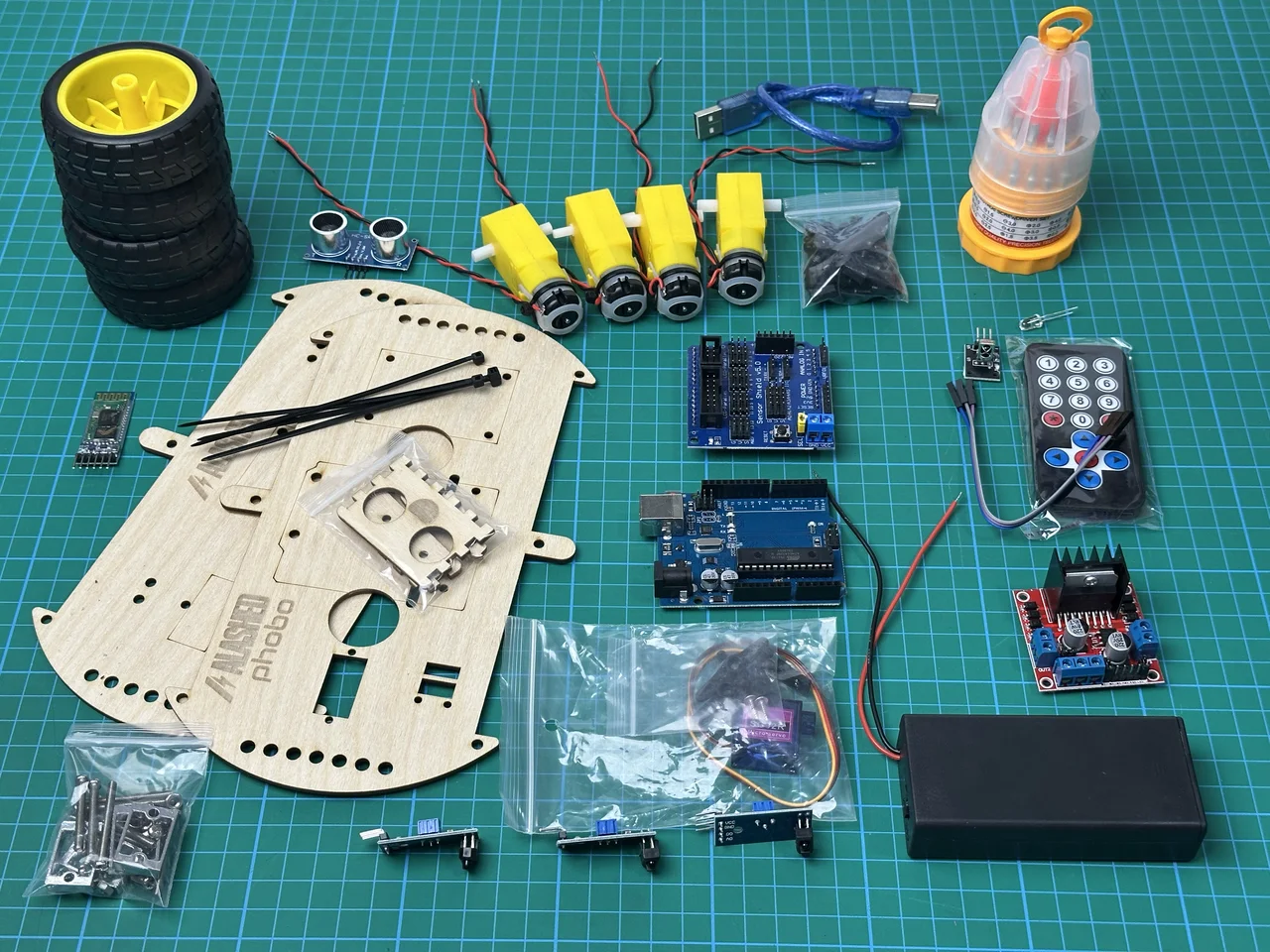
Полный список компонентов
Основные компоненты:
Компонент |
Кол-во |
Примечание |
|---|---|---|
Arduino Uno R3 |
1 шт |
Микроконтроллер ATmega328P |
Sensor Shield V5 |
1 шт |
Плата расширения для Arduino |
L298N драйвер моторов |
1 шт |
H-bridge, 2 канала |
DC моторы жёлтые + колёса |
4 комплекта |
3-6V, редуктор 1:48 |
Алюминиевые стойки для колёс |
4 шт |
D-образное отверстие |
SG92R сервопривод 9g |
1 шт |
180°, 2.5 кг·см |
RCWL-9610A ультразвук |
1 шт |
3-500 см, GPIO режим |
Датчики линии (аналог.) |
3 шт |
ИК, аналоговый + цифровой |
VS1838B ИК-приёмник |
1 шт |
NEC, 38 kHz |
HM-10 Bluetooth BLE |
1 шт |
BLE 4.0, CC2541 |
Батарейный отсек 2×18650 |
1 шт |
С выключателем |
Li-ion 18650 аккумуляторы |
2 шт |
3.7V, 2000+ mAh |
Деревянное шасси (фанера) |
2 этажа |
Лазерная резка 3 мм |
Корпус для ультразвука (лазерная резка) |
1 комплект |
4 детали для сборки |
Крепёж:
Тип крепежа |
Кол-во |
Назначение |
|---|---|---|
Болт M3×6 мм серебристый (крестовая головка) |
8 шт |
Крепление моторов |
Болт M3×30 мм серебристый + гайка M3 |
4 комплекта (по 2 шт) |
Крепление колёс |
Болт M3×6 мм чёрный (шестигранная головка) |
32 шт |
L298N, стойки между ярусами, Arduino, батарейный отсек |
Болт M3×9 мм + гайка M3 нейлоновая |
3 комплекта |
Датчики линии |
Болт M2×8 мм + гайка M2 |
4 комплекта |
ИК-приёмник, сервопривод |
Нейлоновая стойка 40 мм (M3) |
6 шт |
Между этажами |
Нейлоновая стойка 10 мм (M3) |
8 шт |
Под Arduino, под L298N |
Болты для сервопривода |
В комплекте серво |
Крепление головы |
Провода:
Тип провода |
Кол-во |
Назначение |
|---|---|---|
Провода Female-Female (20 см) |
28 шт |
Датчики → Sensor Shield |
Провод питания AWG (красный+чёрный) |
1 шт |
L298N → Sensor Shield |
Кабельные стяжки (хомуты) |
5 шт |
Организация проводов |
Первый этап сборки:
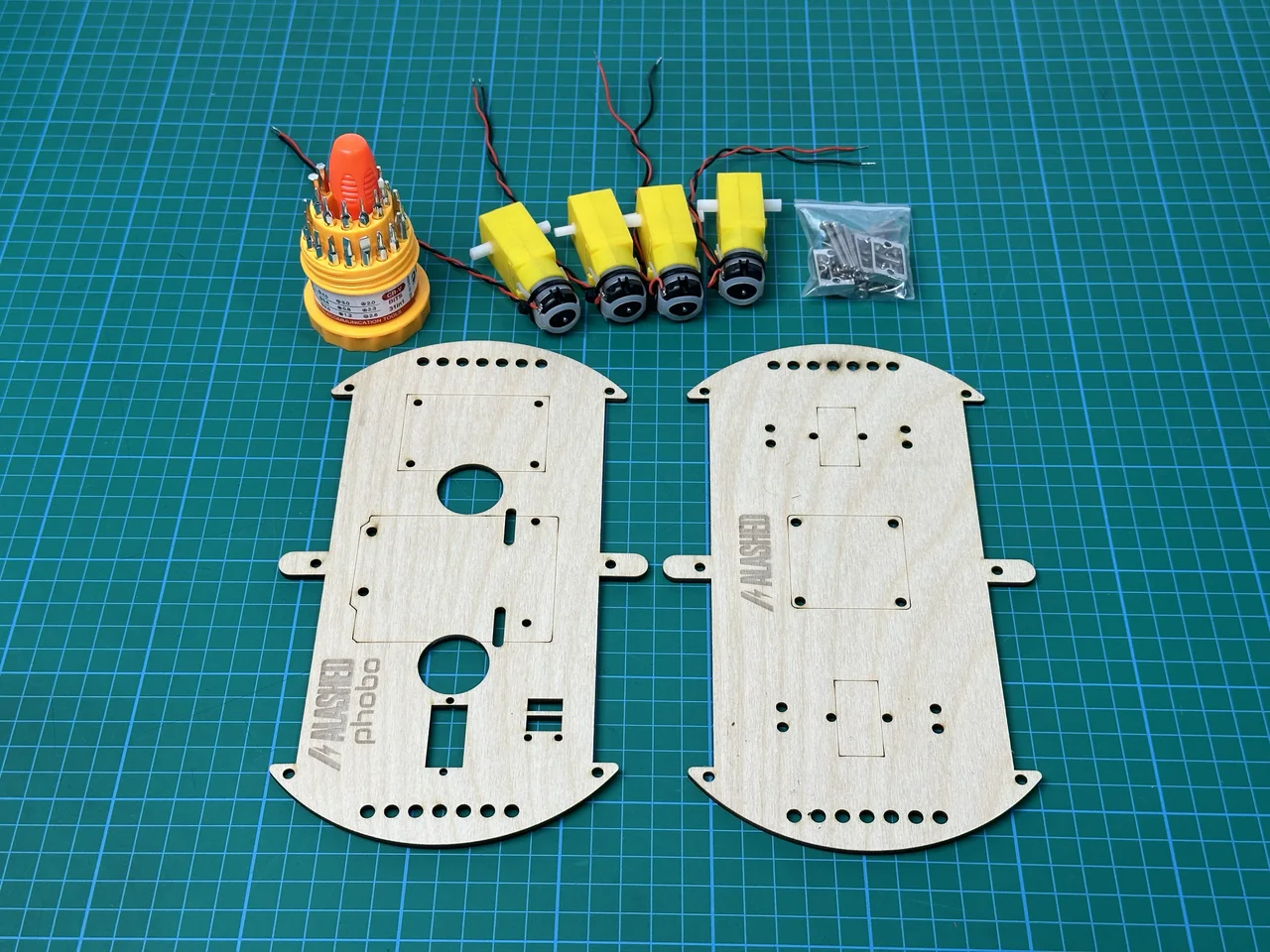
На фото: - Floor 1 (нижняя платформа) и Floor 2 (верхняя платформа) - 4 DC мотора с колёсами - Серебристые болты M3×6 мм и M3×30 мм для моторов и колёс - Набор отвёрток 31в1 с различными насадками (крестовая, шестигранная, плоская и др.)
Примечание
Набор отвёрток 31в1 — это всё, что нужно для сборки! Все болты и гайки можно затянуть насадками из набора.
Подготовка рабочего места
Перед началом сборки:
Освободите просторное место на столе (минимум 60×40 см)
Подготовьте хорошее освещение (настольная лампа)
Разложите все компоненты из набора
Подготовьте инструменты (отвёртки из набора)
Приготовьте небольшие контейнеры для сортировки крепежа (по типам)
Примечание
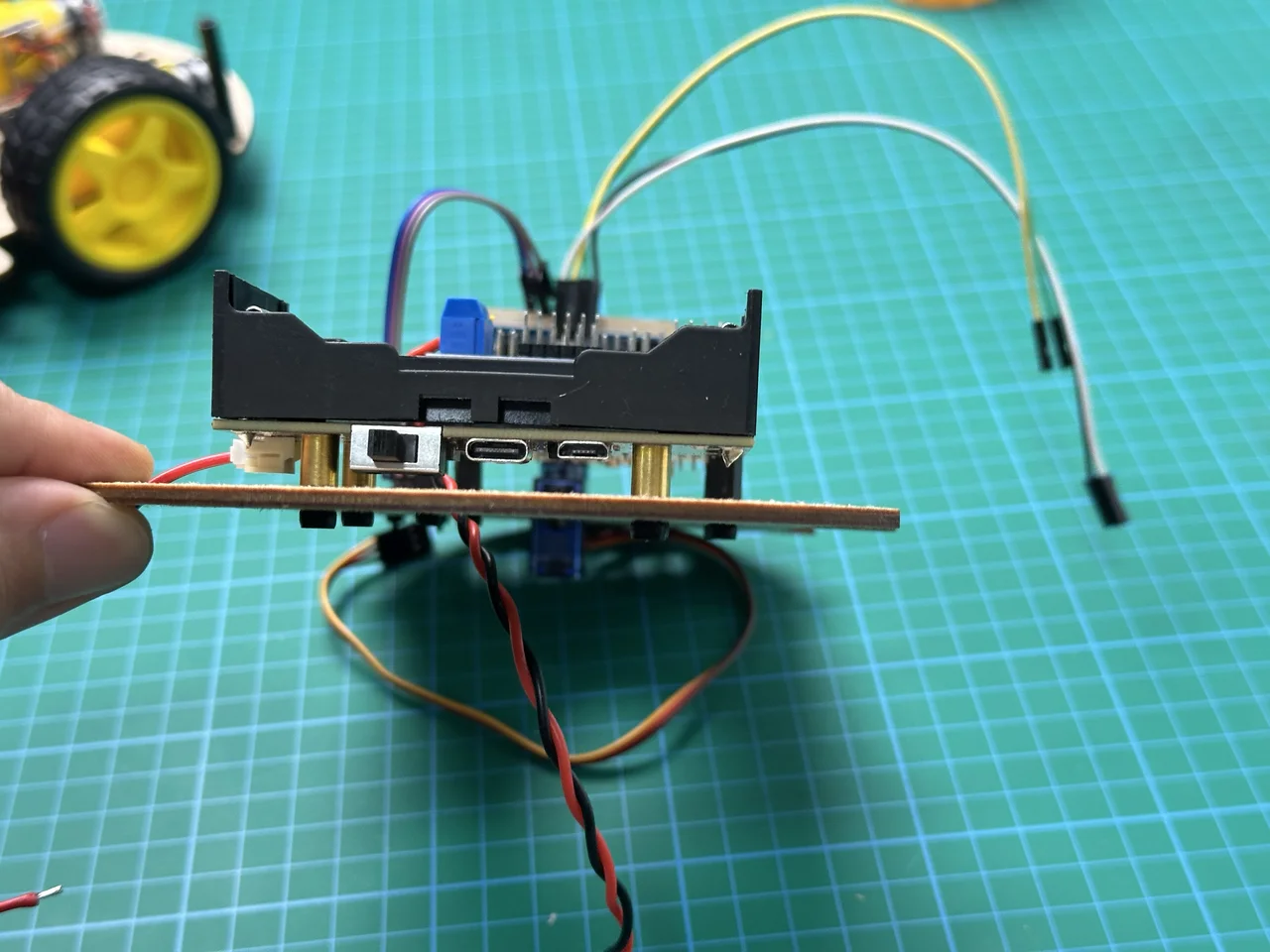
Зарядка: Холдер для батарей имеет встроенный модуль зарядки с Type-C/MicroUSB портами. После сборки вы сможете заряжать робота прямо через USB кабель, не вынимая батареи! Синий LED горит когда включен, зелёный LED горит при зарядке (гаснет когда готово).
Опасно
ВАЖНО: Аккумуляторы 18650 НЕ вставляйте в робота до окончания сборки! Храните их отдельно.
Пошаговая инструкция сборки
Этап 1: Нижний ярус (Floor 1)
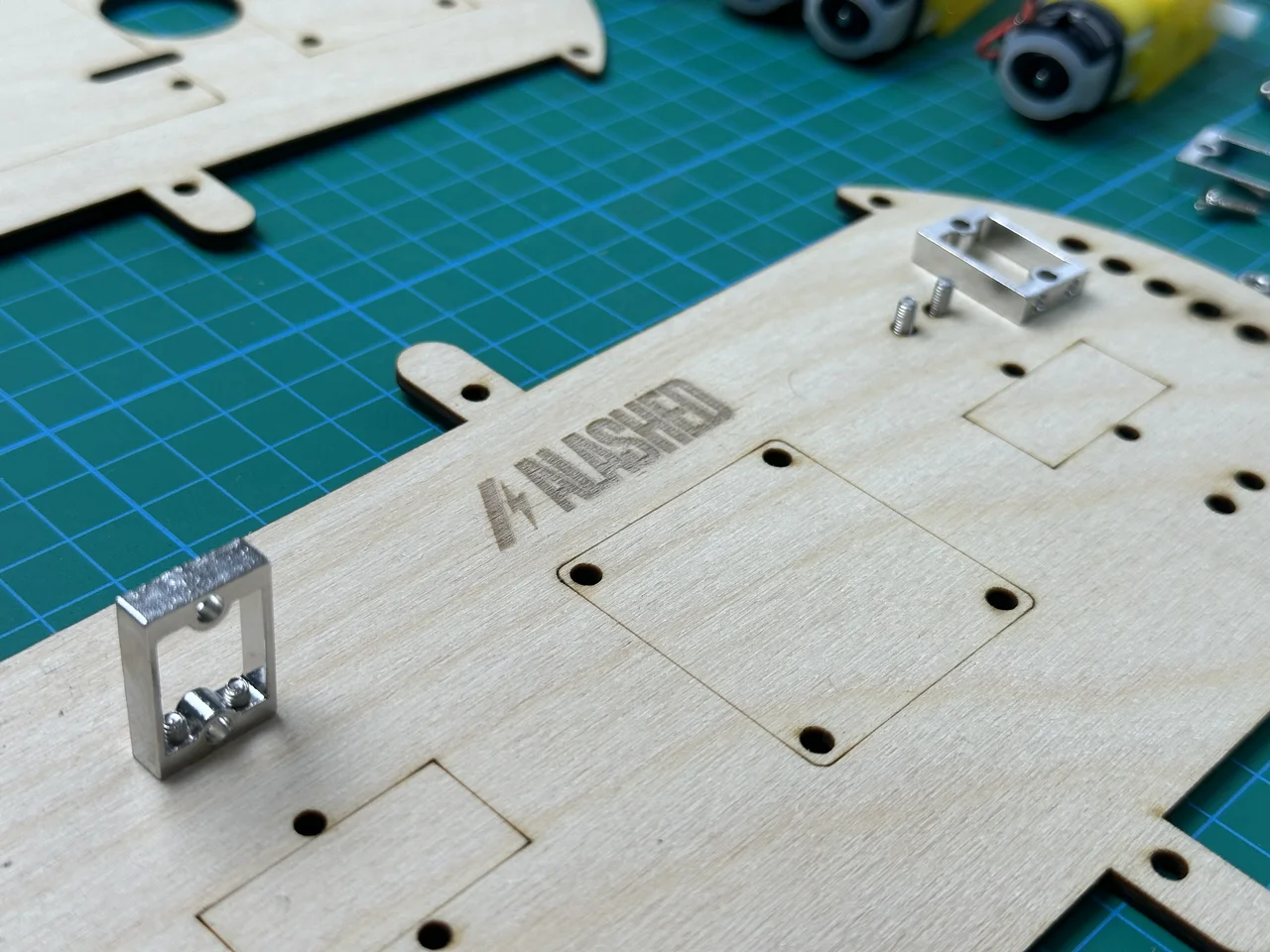
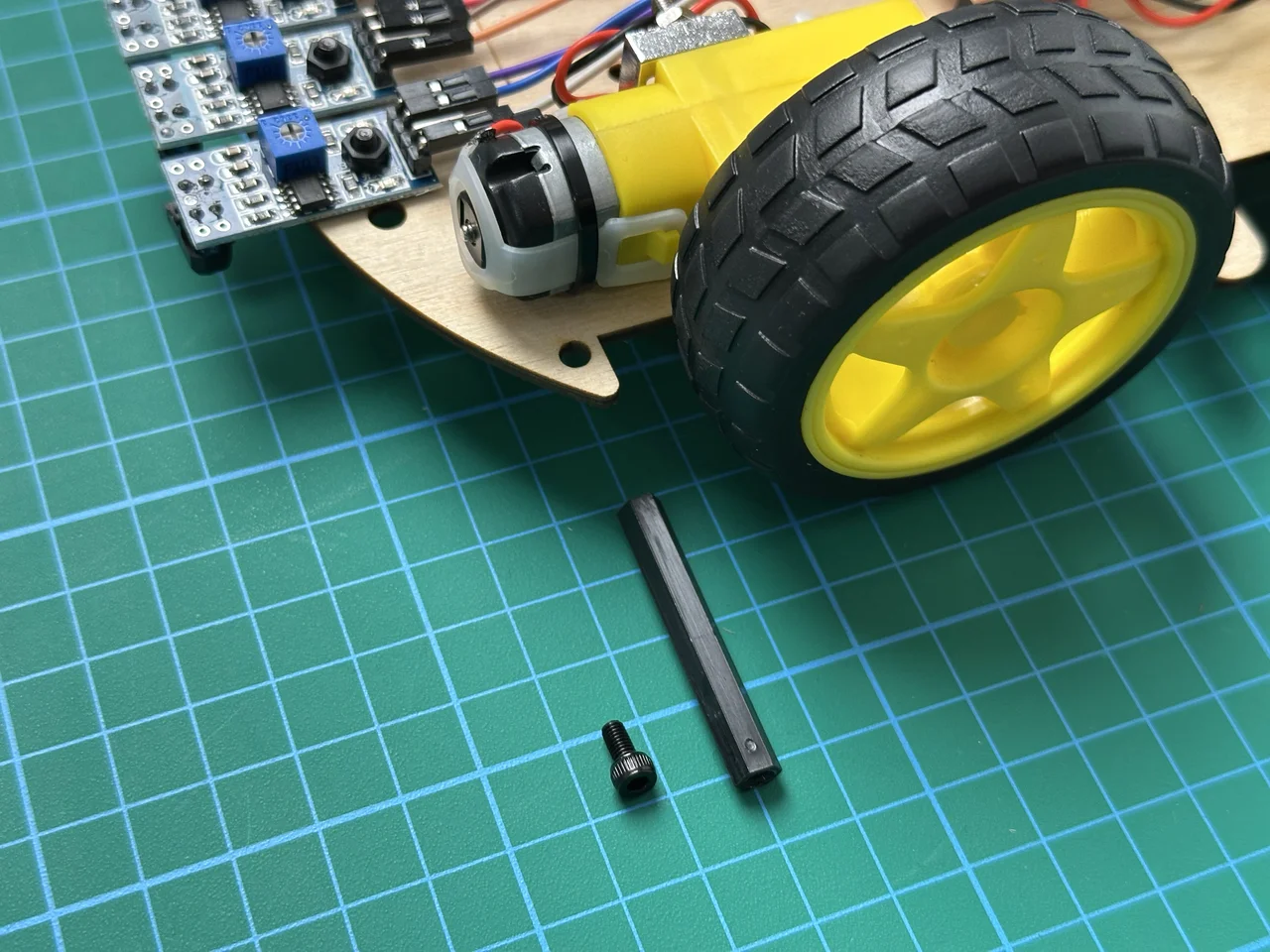
Шаг 1: Подготовка Floor 1 и алюминиевых стоек
Возьмите нижнюю деревянную платформу (Floor 1) и 4 алюминиевые стойки для колёс:
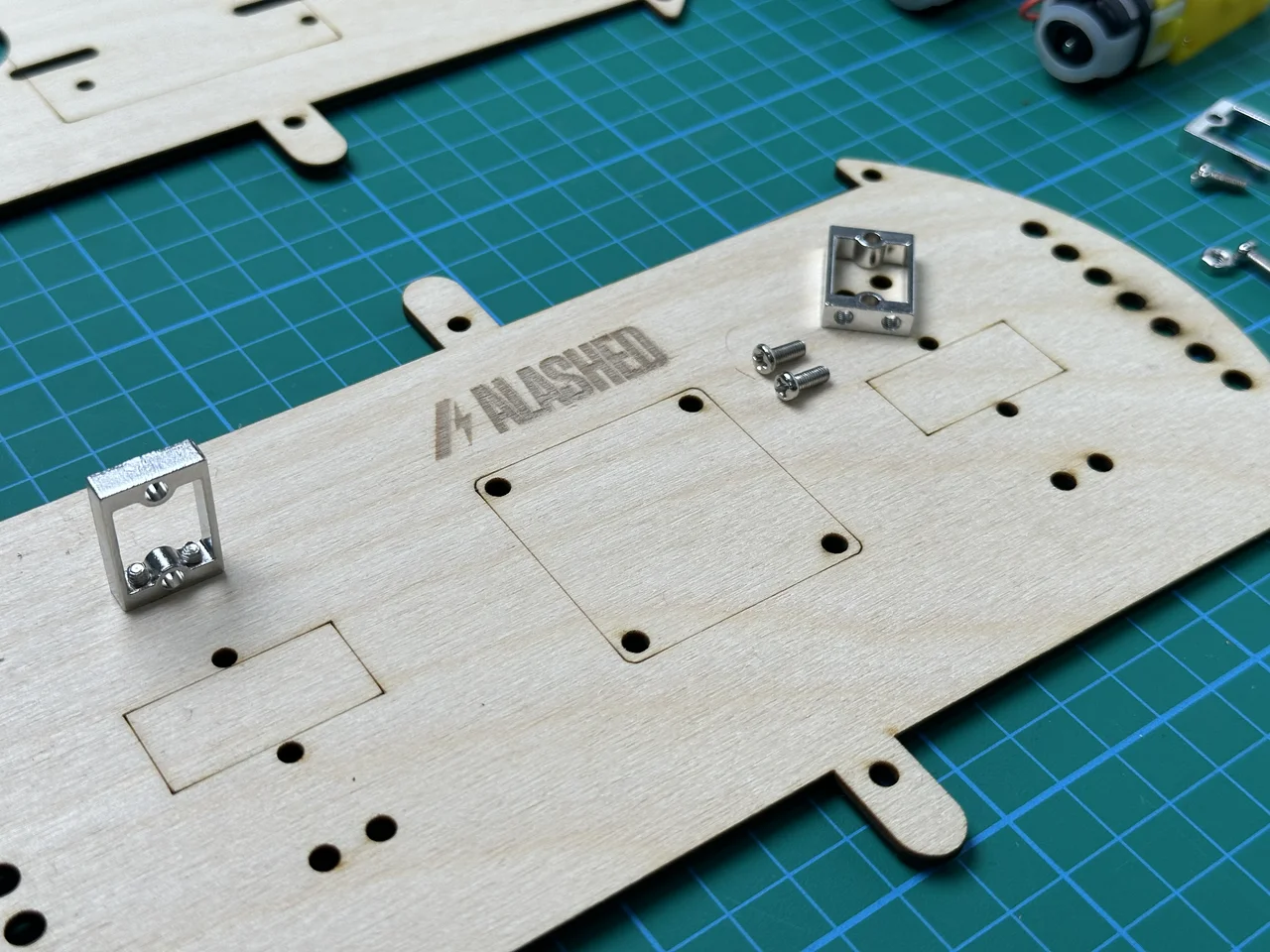
Подготовьте 8 серебристых болтов M3×6 мм для крепления моторов (по 2 на каждый мотор):
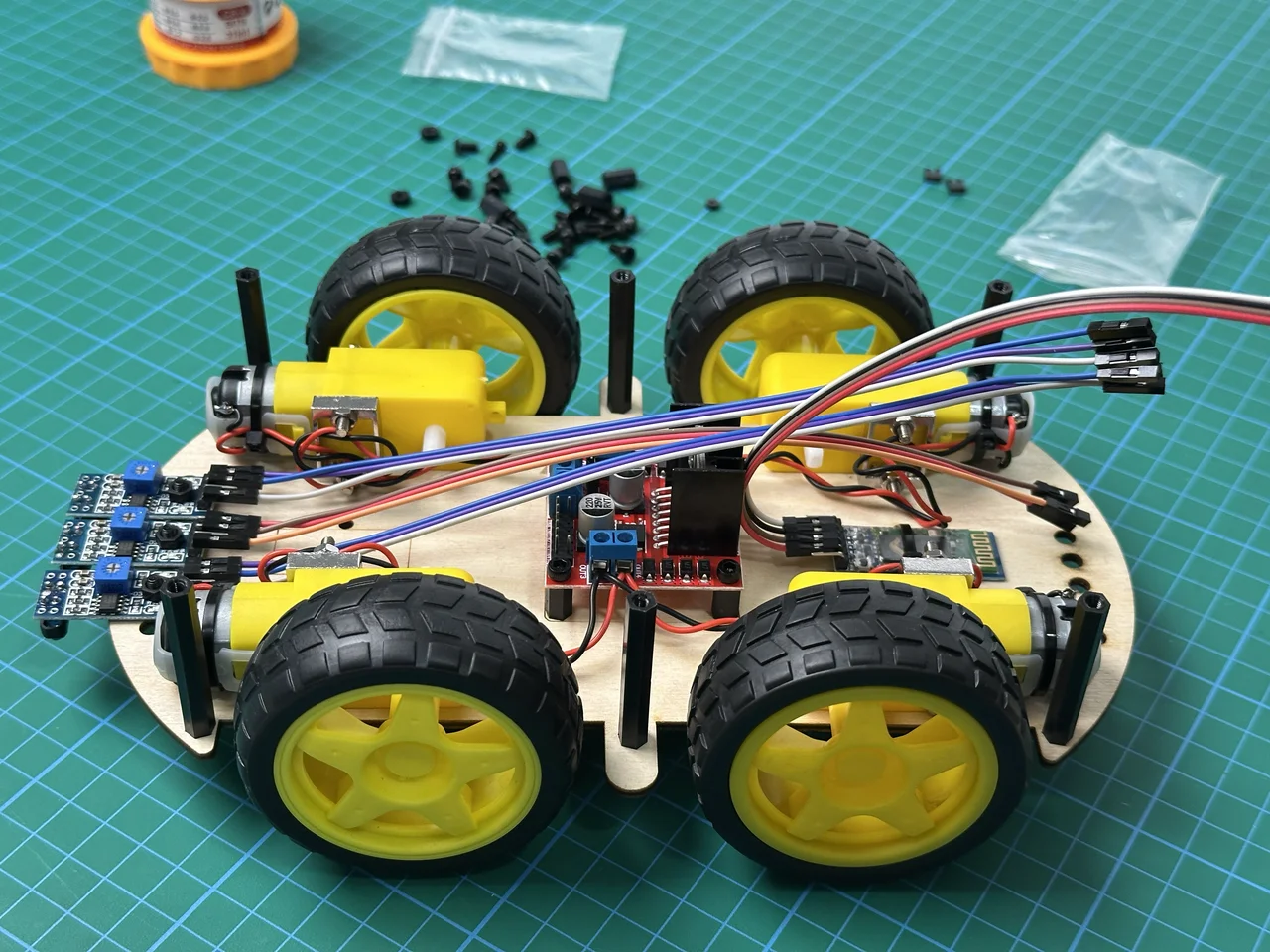
Шаг 2: Установка моторов на Floor 1
2.1. Правильная ориентация моторов
КРИТИЧЕСКИ ВАЖНО: Моторы должны быть установлены в правильной ориентации!
Валы моторов направлены НАРУЖУ (к углам платформы)
Провода моторов направлены ВНУТРЬ (к центру платформы)
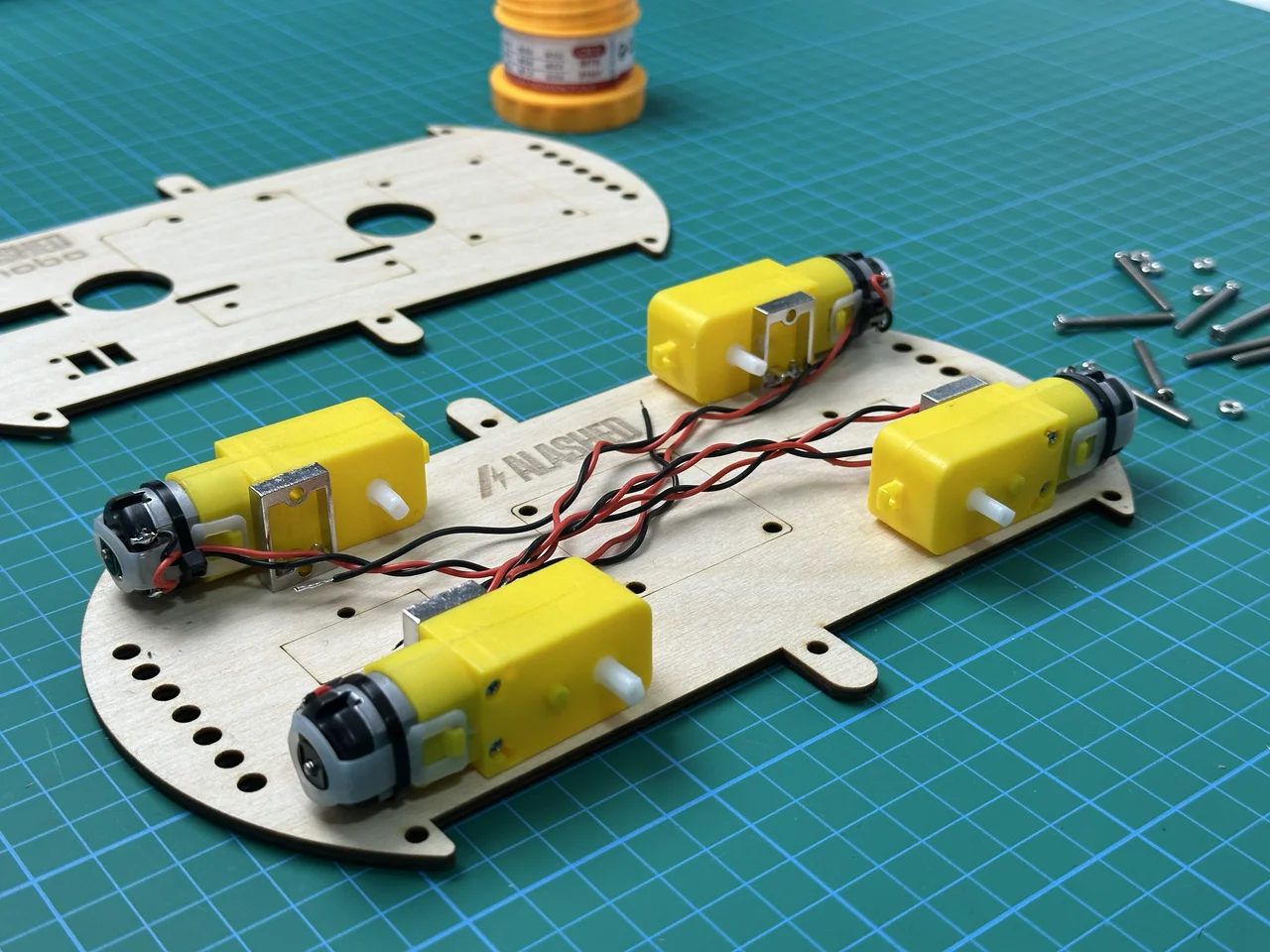
2.2. Крепление моторов к платформе
Для каждого из 4 моторов выполните:
Вставьте мотор в угловое отверстие платформы
Совместите отверстия мотора с отверстиями в дереве
Вкрутите 2 серебристых болтика M3×30 мм (крестовая головка) с обратной стороны
Примечание
Колёса будут установлены позже (после установки всех компонентов нижнего яруса). Сейчас переходим к установке электроники.
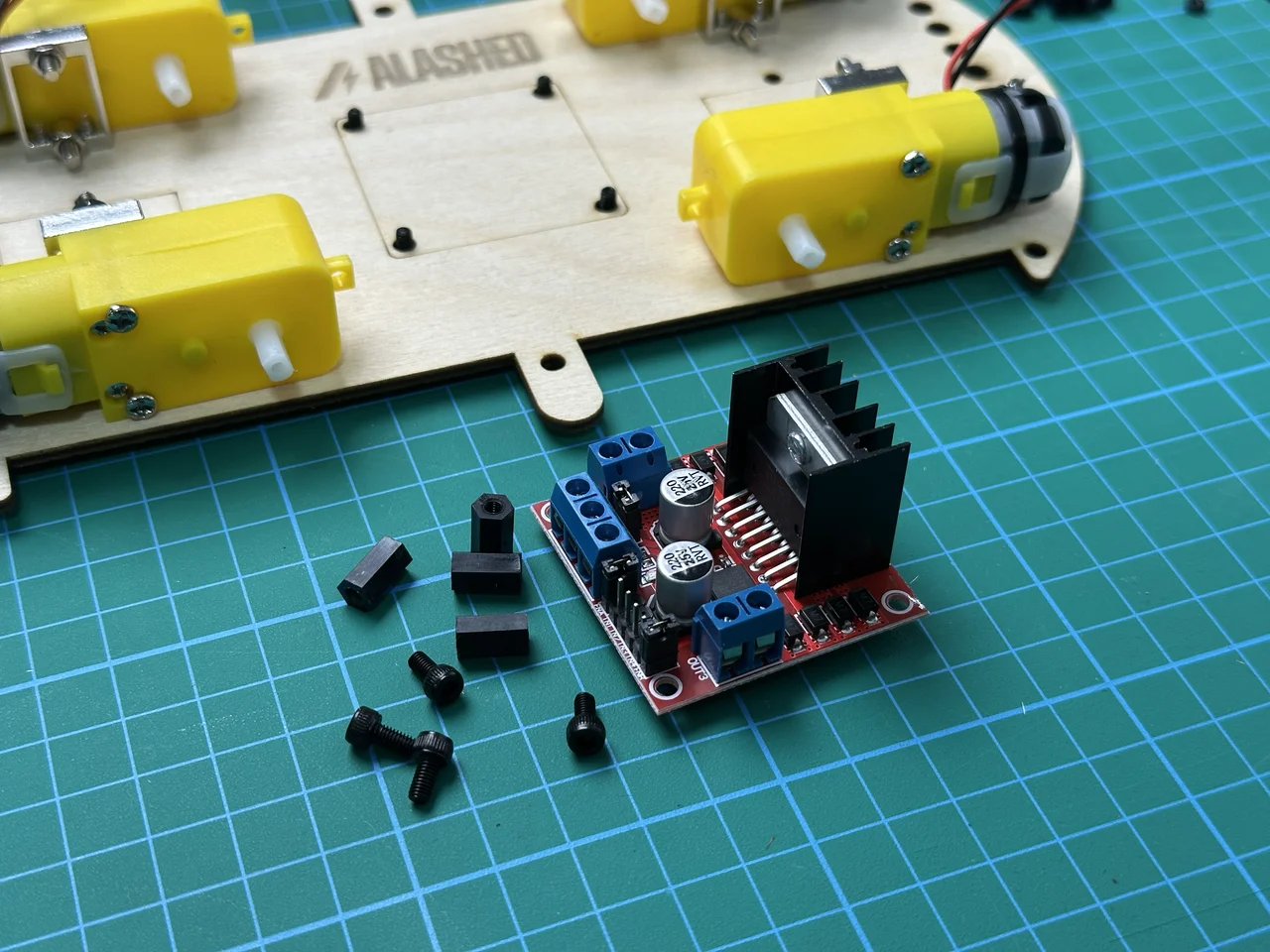
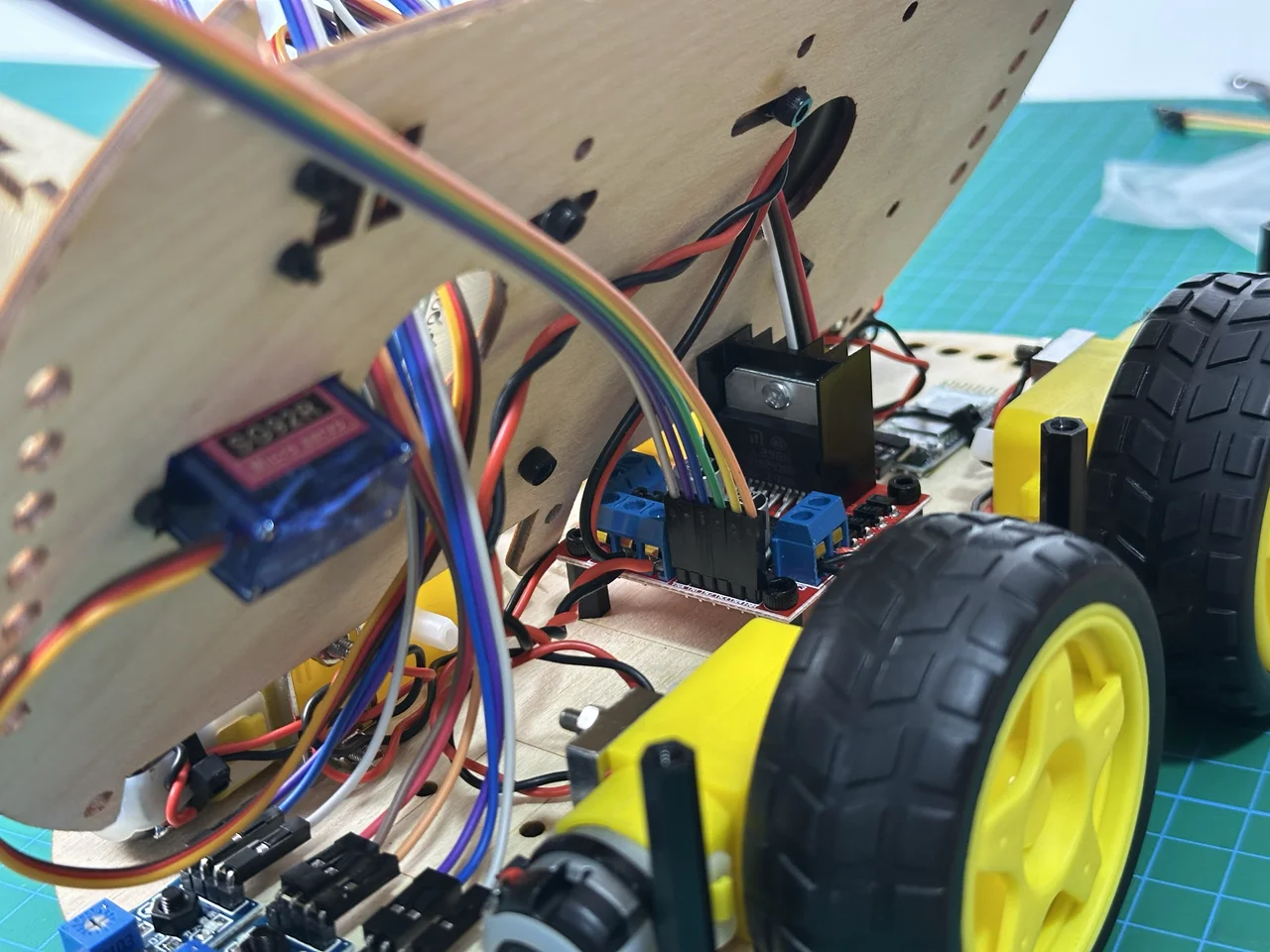
Шаг 3: Установка L298N на Floor 1
Подготовьте:
Плату L298N
4 нейлоновые стойки 10 мм
8 чёрных болтов M3×6 мм
3.1. Крепление стоек к L298N
Вставьте 4 чёрных болта M3×6 мм сверху L298N
Снизу накрутите 4 нейлоновые стойки 10 мм
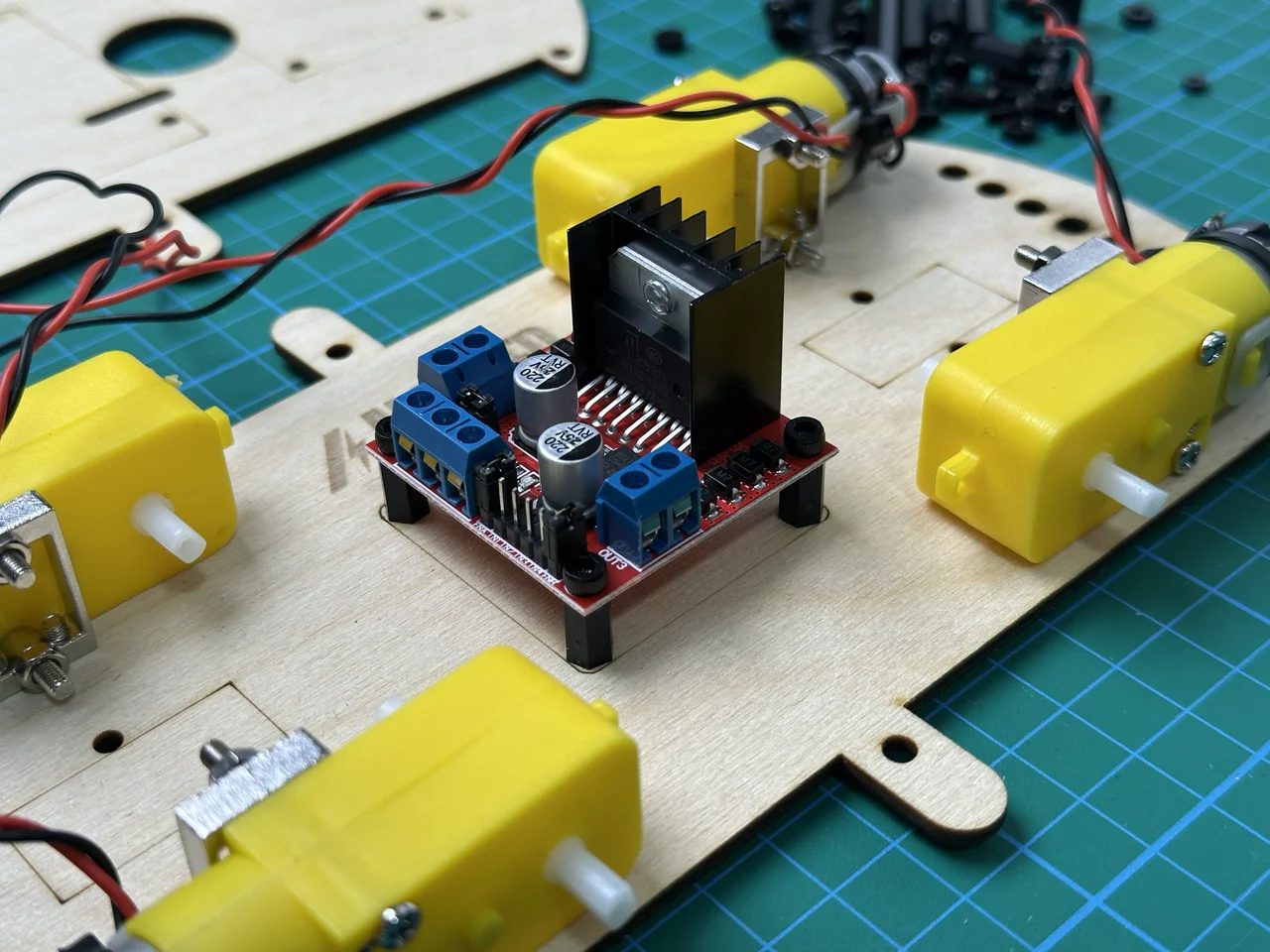
3.2. Крепление L298N к платформе
Поставьте L298N со стойками на центр Floor 1
Совместите стойки с отверстиями
Снизу вкрутите 4 чёрных болта M3×6 мм
Шаг 4: Подключение моторов к L298N
4.1. Принцип подключения
У нас 4 мотора, но L298N имеет 2 канала (Motor A и Motor B).
Решение: подключить моторы параллельно по бортам:
Motor A (OUT1, OUT2): Правый передний + Правый задний мотор
Motor B (OUT3, OUT4): Левый передний + Левый задний мотор
4.2. Подключение правых моторов
Скрутите провода правого переднего мотора
Скрутите провода правого заднего мотора
Соедините чёрные провода вместе → вставьте в OUT1
Соедините красные провода вместе → вставьте в OUT2
Затяните винтовые клеммы
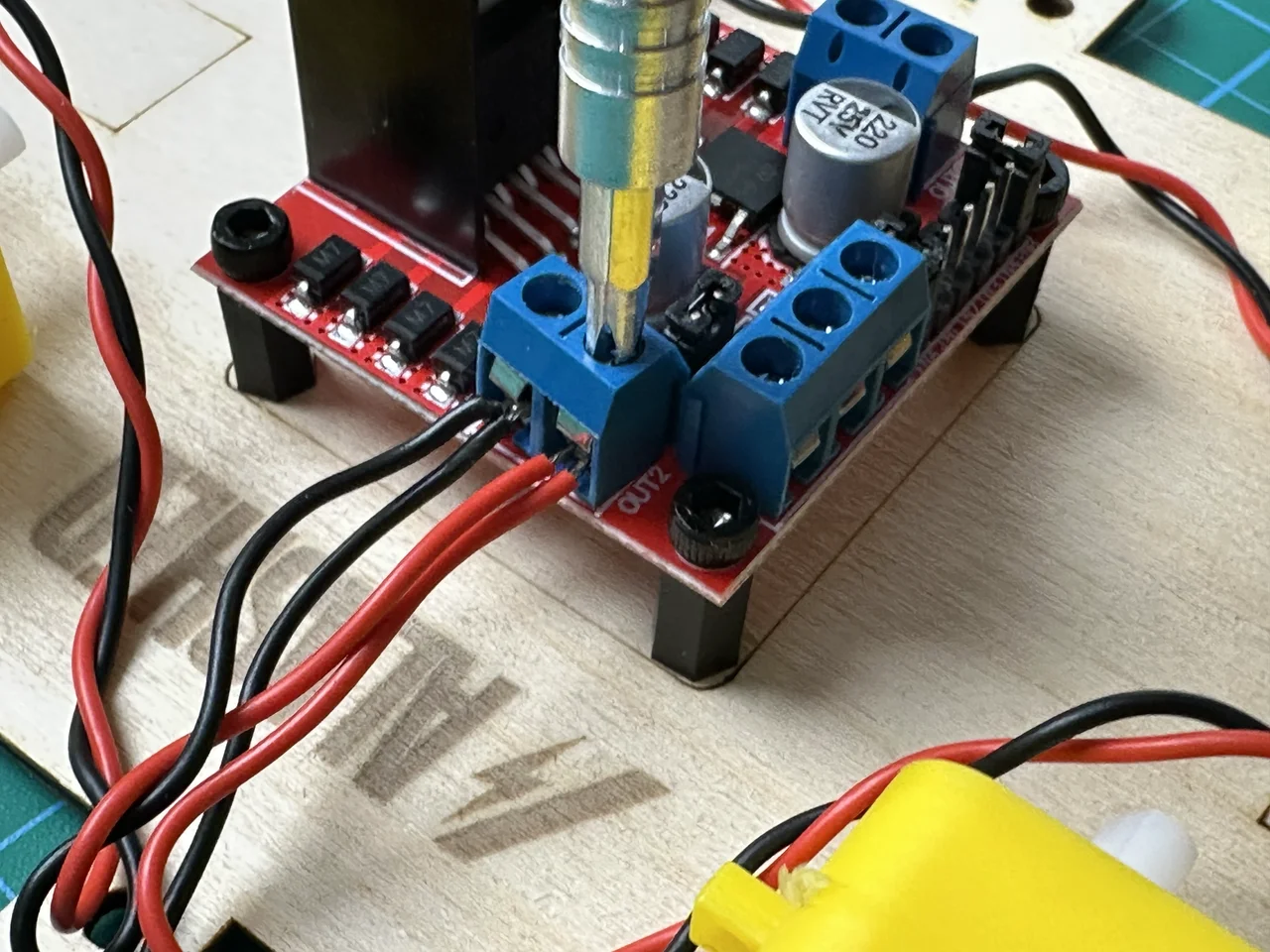
4.3. Подключение левых моторов
Скрутите провода левого переднего мотора
Скрутите провода левого заднего мотора
Соедините чёрные провода вместе → вставьте в OUT3
Соедините красные провода вместе → вставьте в OUT4
Затяните винтовые клеммы
4.4. Все моторы подключены
Примечание
Полярность моторов НЕ критична! Если робот поедет назад вместо вперёд — это легко исправить в коде (Проект 2), поменяв HIGH и LOW местами для IN1-IN4.
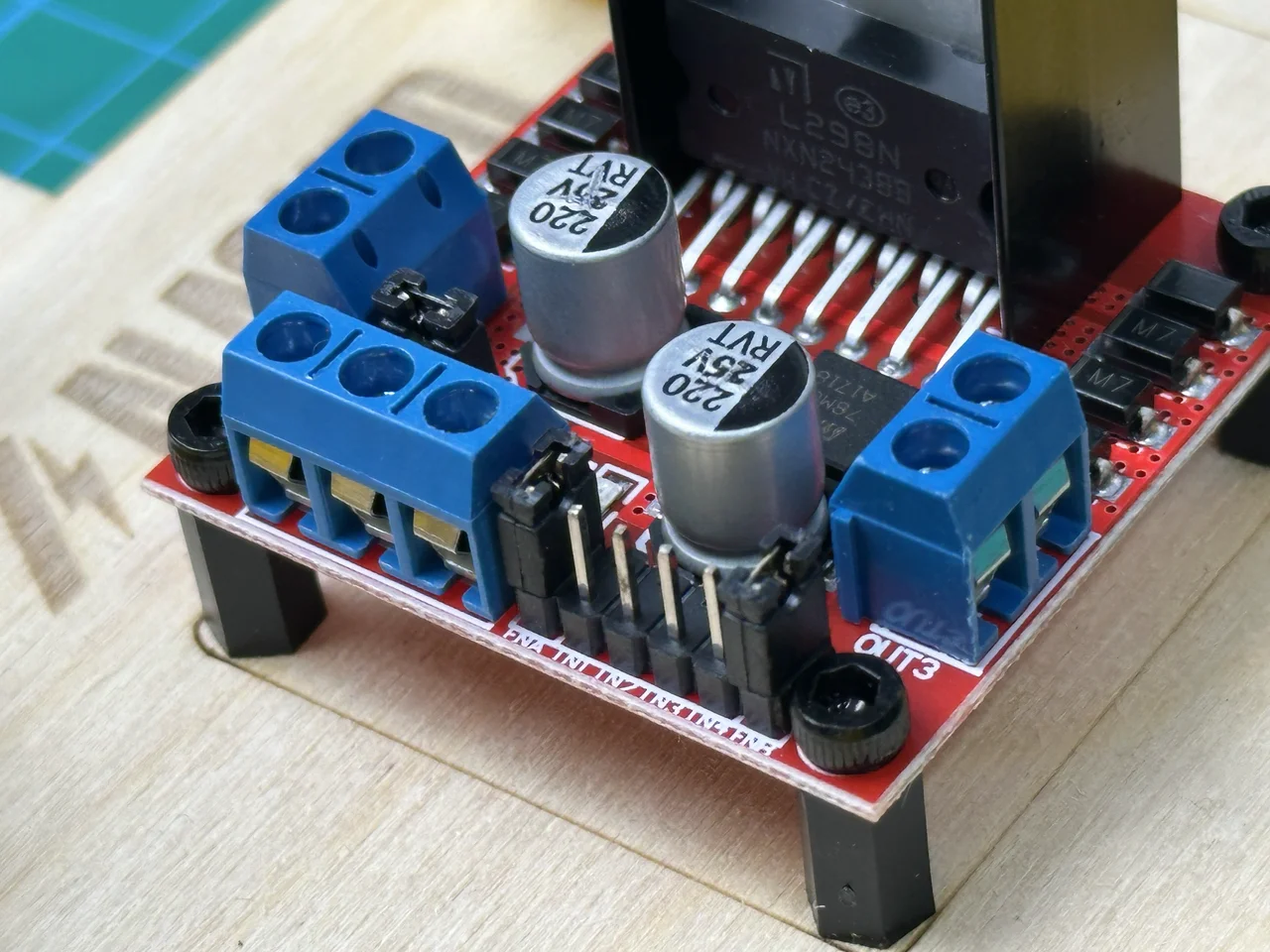
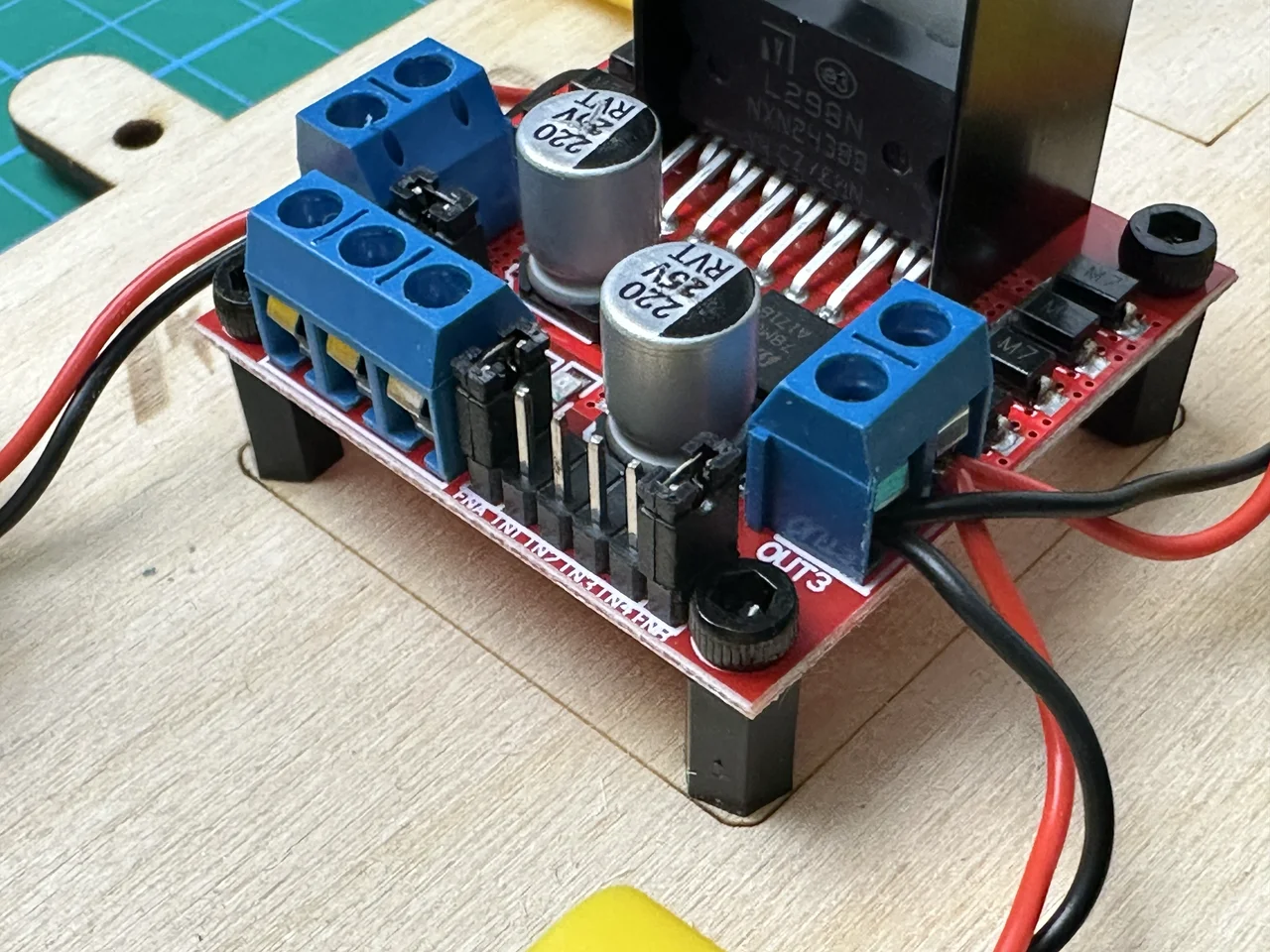
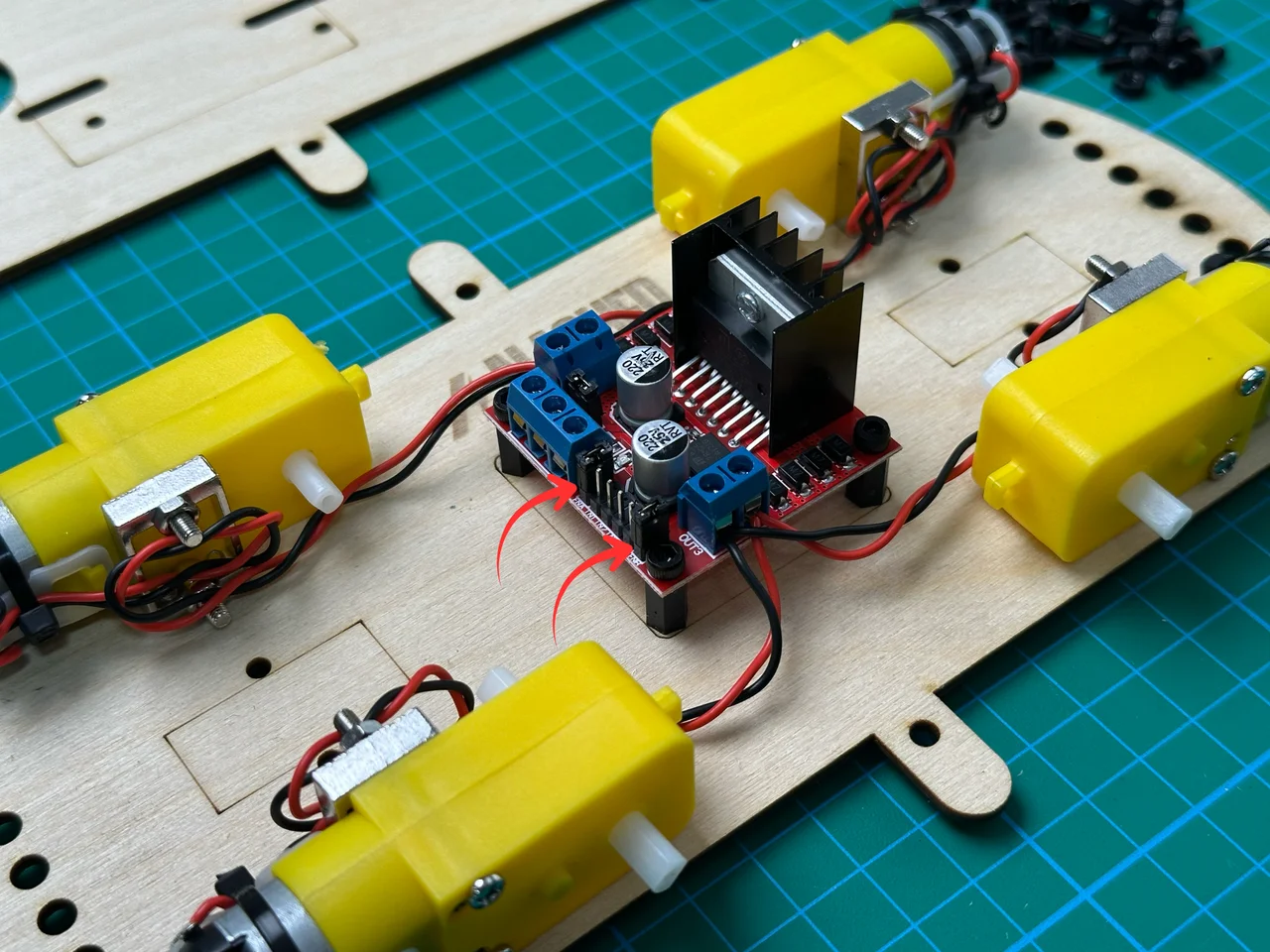
Шаг 5: Удаление перемычек ENA и ENB
Опасно
КРИТИЧЕСКИ ВАЖНО для управления скоростью!
На L298N проверьте перемычки ENA и ENB (сбоку платы):
Если перемычки установлены → моторы будут работать только на максимальной скорости (100%)
Если перемычки удалены → можем управлять скоростью через Arduino (PWM 0-100%)
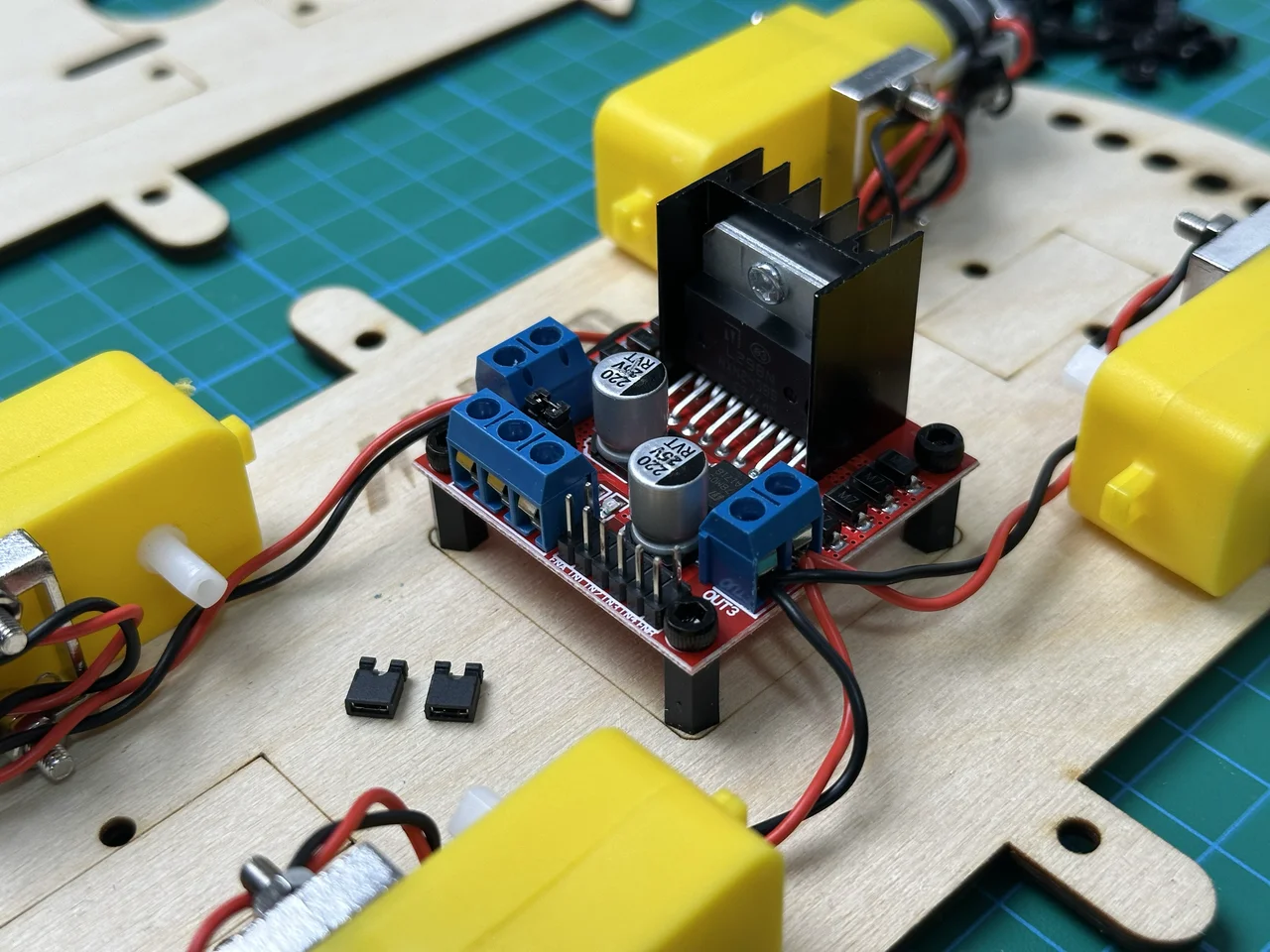
Что делать:
Найдите перемычки ENA и ENB на L298N
Снимите обе перемычки
Сохраните их (могут пригодиться для других проектов)
Теперь пины ENA и ENB свободны и мы подключим их к Arduino (D5 и D6) для управления скоростью моторов.
Шаг 6: Установка HM-10 Bluetooth модуля и колёс
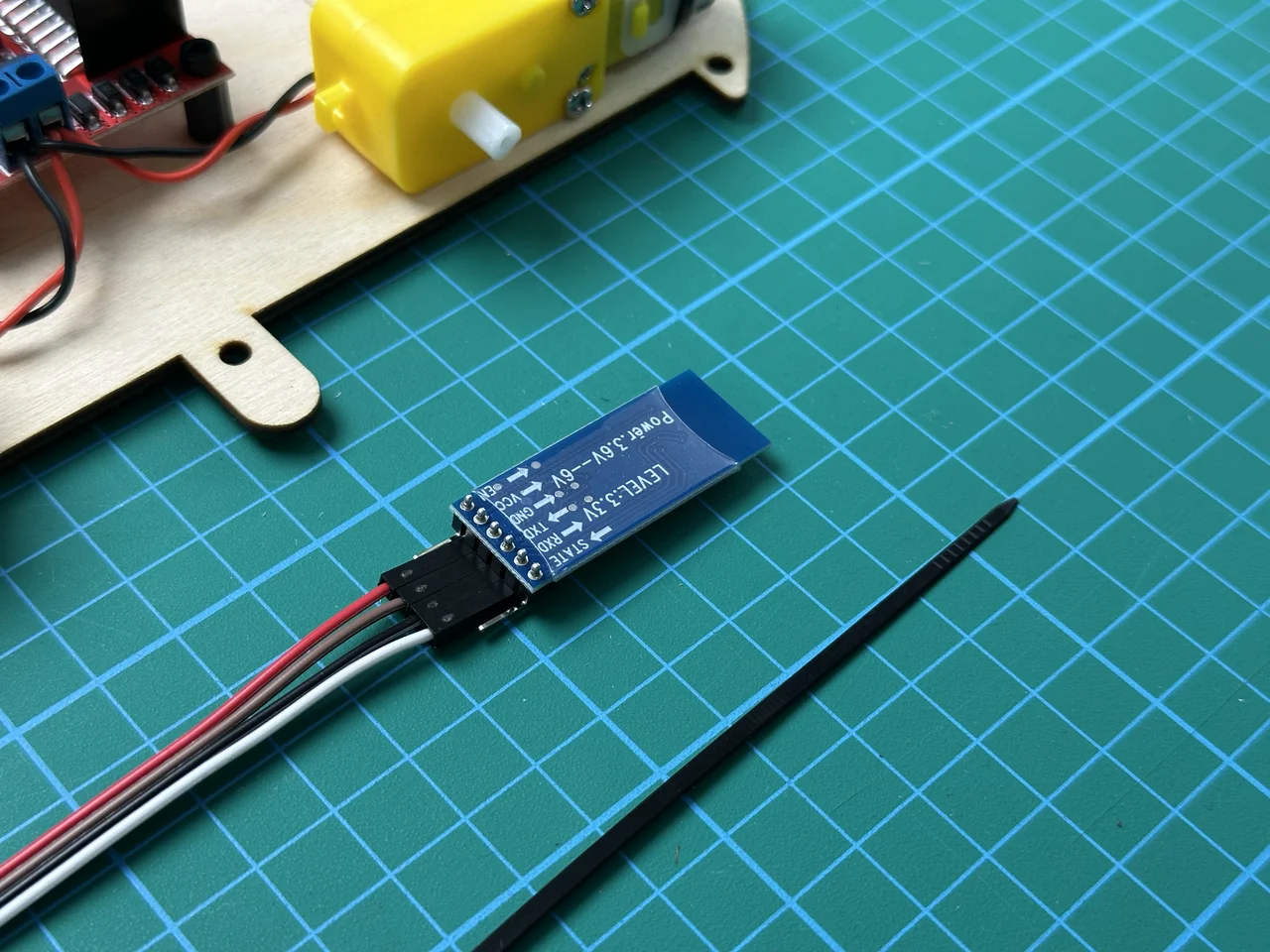
6.1. Подготовка проводов для HM-10
Подготовьте 4 провода Female-Female и 1 пластиковый хомут:
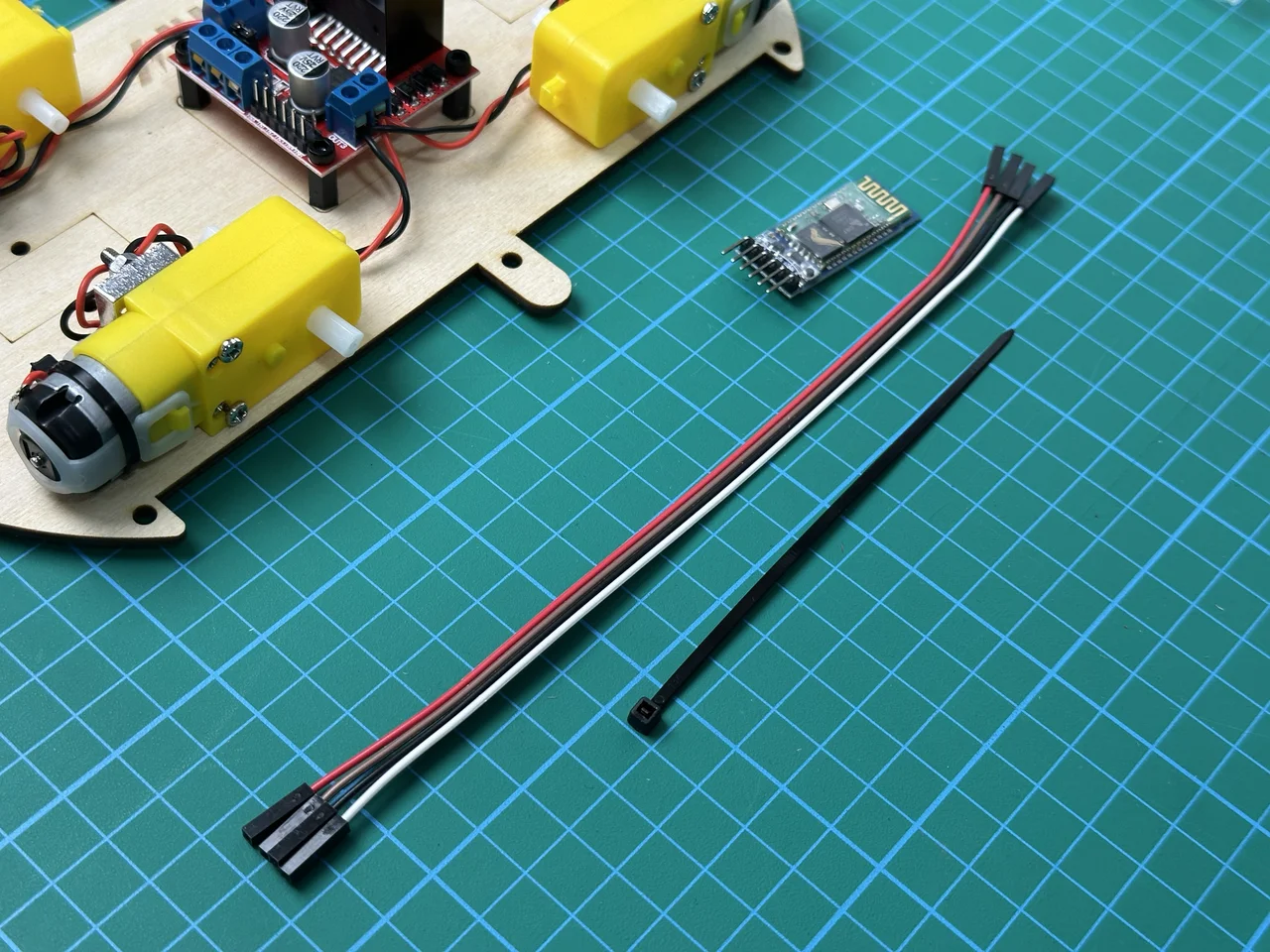
6.2. Подключение проводов к HM-10
Подключите провода к HM-10:
Красный → VCC (питание +5V)
Коричневый → GND (земля)
Черный → TXD (передача данных HM-10 → Arduino)
Белый → RXD (приём данных HM-10 ← Arduino)
Примечание
Провода пока НЕ подключаем к Sensor Shield! Сначала закрепим модуль на платформе.
6.3. Крепление HM-10 к Floor 1
HM-10 крепится сзади платформы пластиковым хомутом:
Выберите место сзади Floor 1 (не мешает L298N и моторам)
Проденьте хомут через отверстия в платформе
Оберните хомут вокруг HM-10
Затяните хомут (умеренно!)
Отломите или обрежьте лишний хвостик
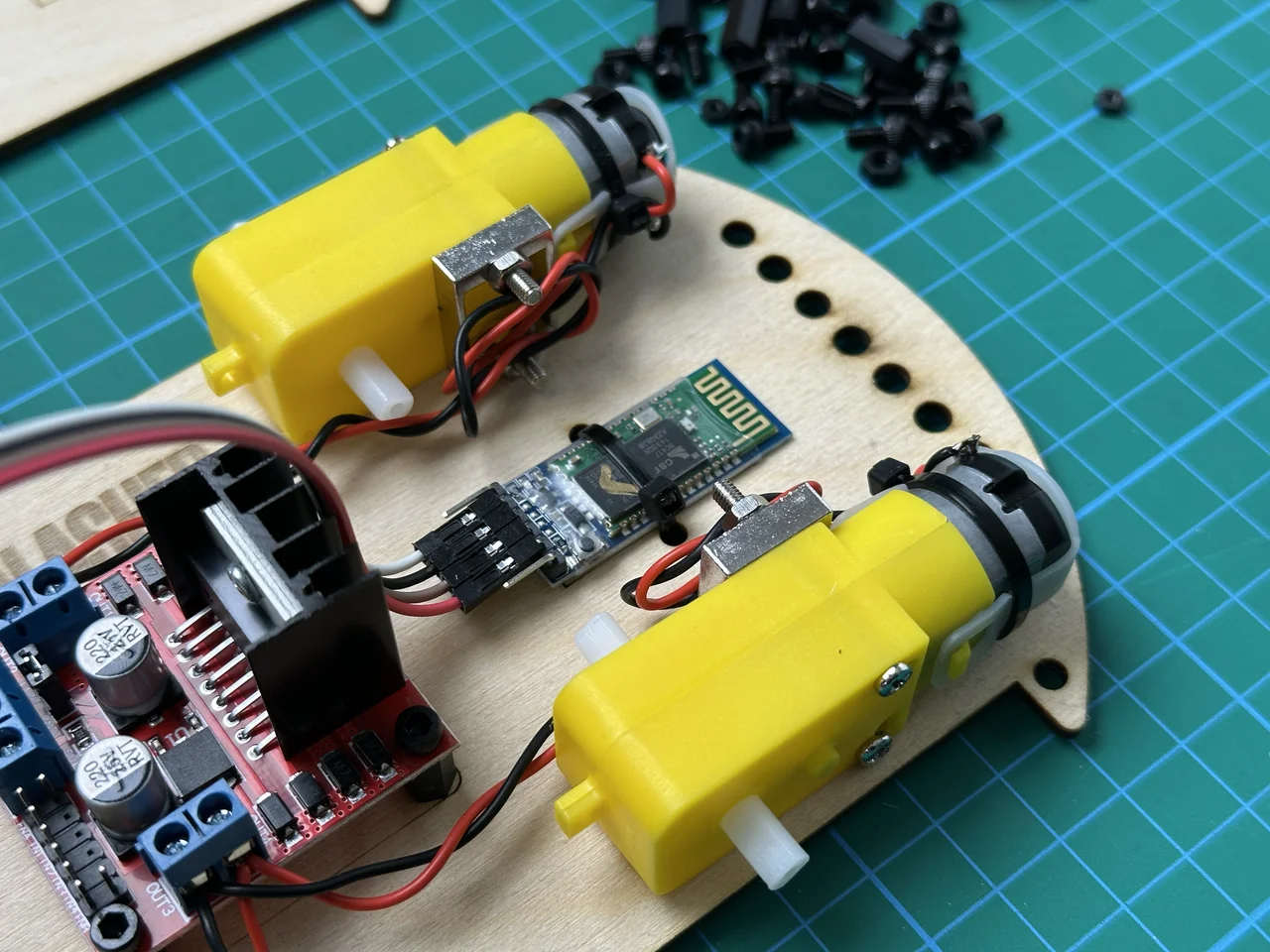
6.4. HM-10 установлен и колеса надеты
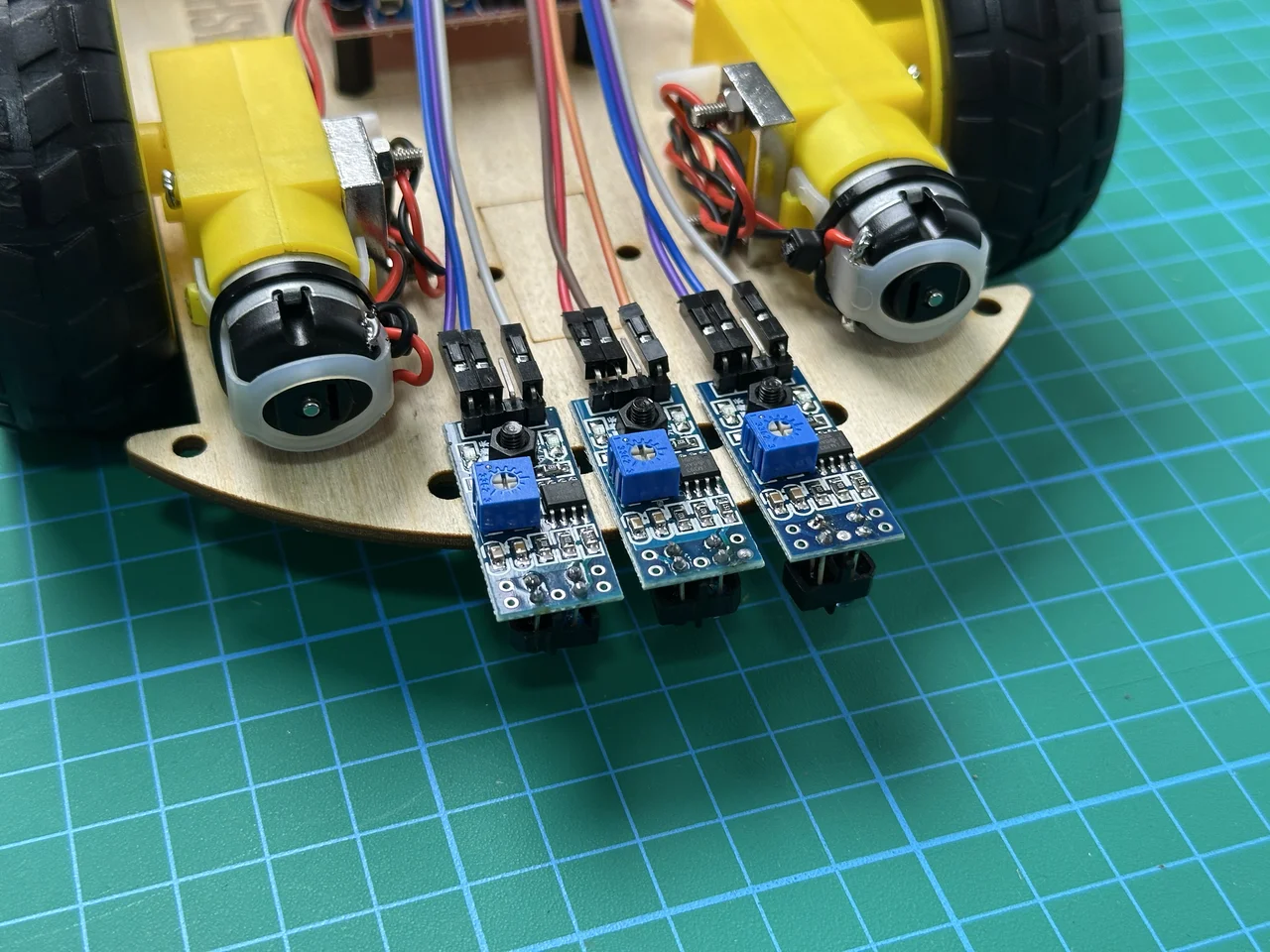
Шаг 7: Установка датчиков линии
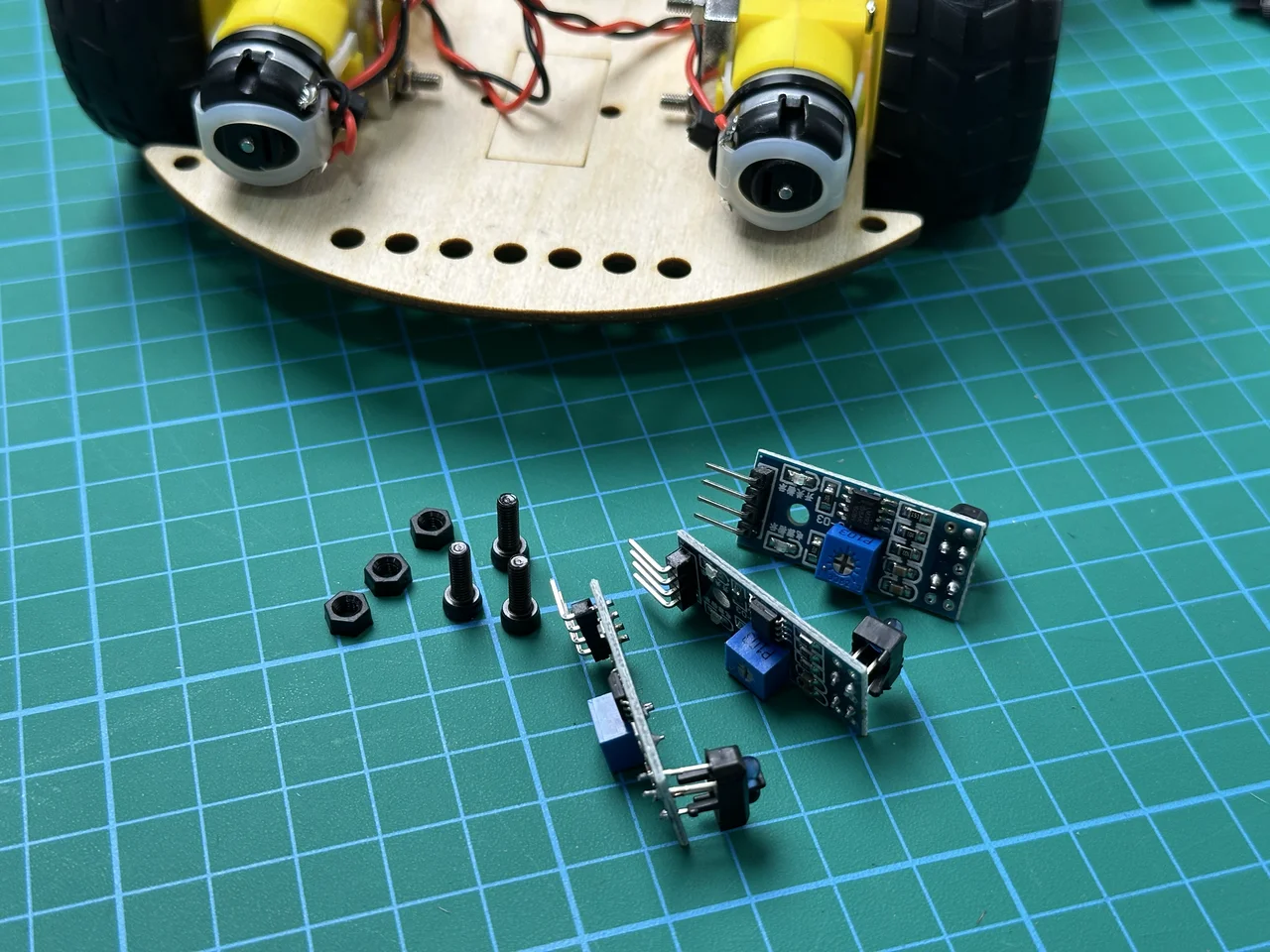
7.1. Подготовка датчиков и крепежа
Подготовьте:
3 датчика линии (аналого-цифровые ИК-датчики)
3 болта M3×9 мм
3 нейлоновые гайки M3
7.2. Расположение датчиков
Датчики устанавливаются спереди нижней платформы в 3 отверстия:
Левый датчик (слева по ходу робота)
Центральный датчик (по центру)
Правый датчик (справа по ходу робота)
7.3. Крепление датчиков
Для каждого из 3 датчиков:
Вставьте болт M3×9 мм снизу Floor 1
Наденьте датчик сверху на болт (синяя плата направлена вверх)
Накрутите нейлоновую гайку M3 сверху
Затяните умеренно
Предупреждение
Высота датчиков над поверхностью должна быть 5-10 мм! Если робот стоит на колёсах, датчики должны быть близко к полу, но не касаться его.
7.4. Подключение проводов
От каждого датчика используем 3 провода Female-Female:
Серый → A0 (аналоговый выход, используем ТОЛЬКО его!)
Фиолетовый → VCC (питание +5V)
Синий → GND (земля)
D0 НЕ подключаем! (цифровой выход с потенциометром — не используется)
Маркировка (запомните для Шага 23):
Левый датчик → будет подключён к A0 на Sensor Shield
Центральный датчик → будет подключён к A1
Правый датчик → будет подключён к A2
Примечание
Провода пока НЕ подключаем к Sensor Shield! Сначала соберём верхний ярус.
Шаг 8: Установка стоек между ярусами
8.1. Подготовка стоек
Подготовьте для соединения двух этажей:
6 нейлоновых стоек 40 мм (M3, чёрные)
6 чёрных болтов M3×6 мм
8.2. Расположение стоек
Стойки устанавливаются в 6 отверстий на Floor 1:
4 стойки по углам (рядом с моторами)
2 стойки посередине (слева и справа)
8.3. Крепление стоек к Floor 1
Для каждой из 6 стоек:
Вставьте чёрный болт M3×6 мм снизу Floor 1
Сверху накрутите нейлоновую стойку 40 мм
Затяните руками (стойка должна стоять вертикально)
8.4. Все стойки установлены
Примечание
Floor 2 пока НЕ устанавливаем! Сначала подготовим все компоненты верхнего яруса.
Этап 2: Верхний ярус (Floor 2)
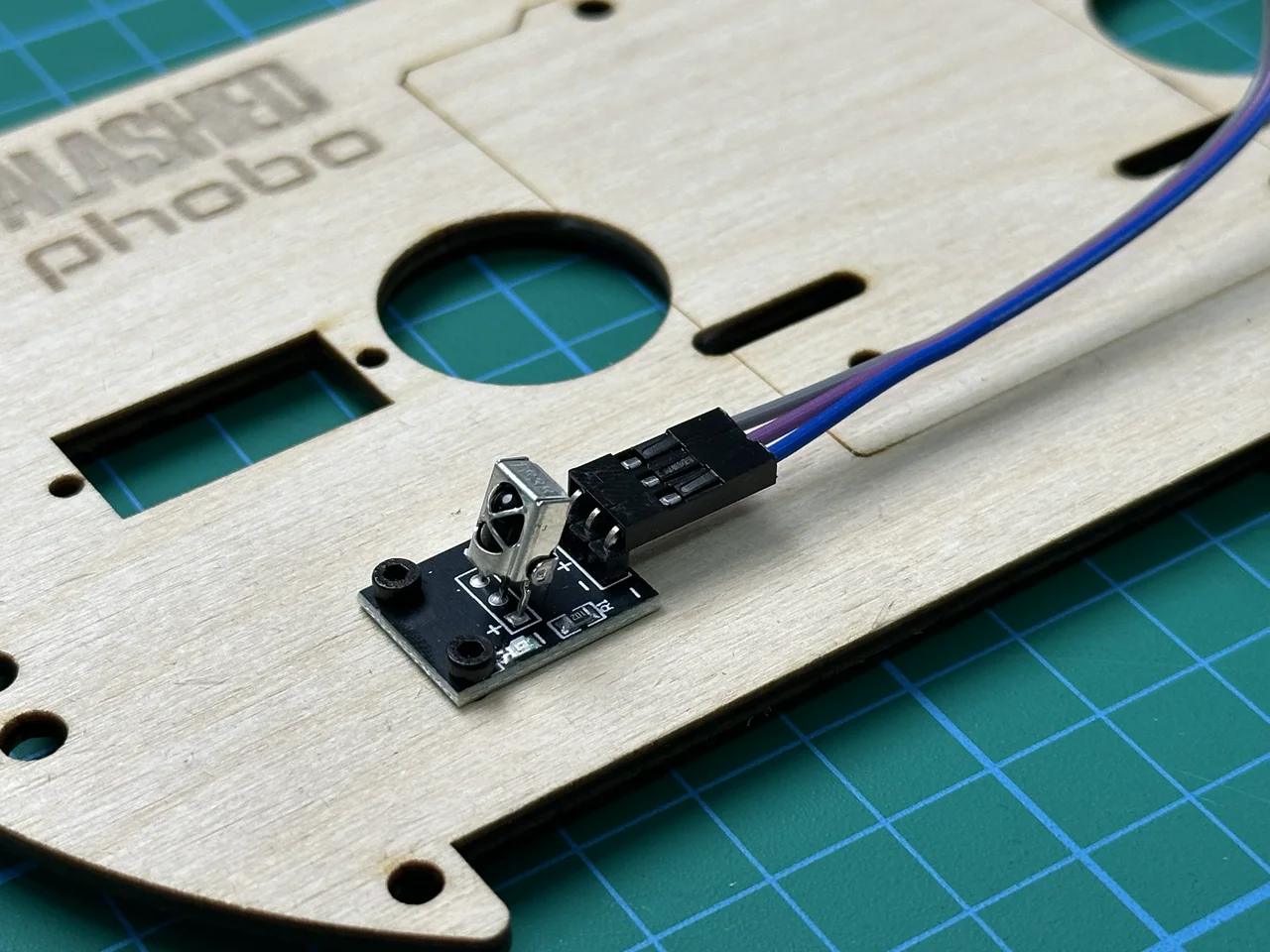
Шаг 9: Установка ИК-приёмника на Floor 2
9.1. Подготовка ИК-приёмника
Подготовьте:
VS1838B ИК-приёмник (3 вывода)
2 болта M2×8 мм
2 гайки M2
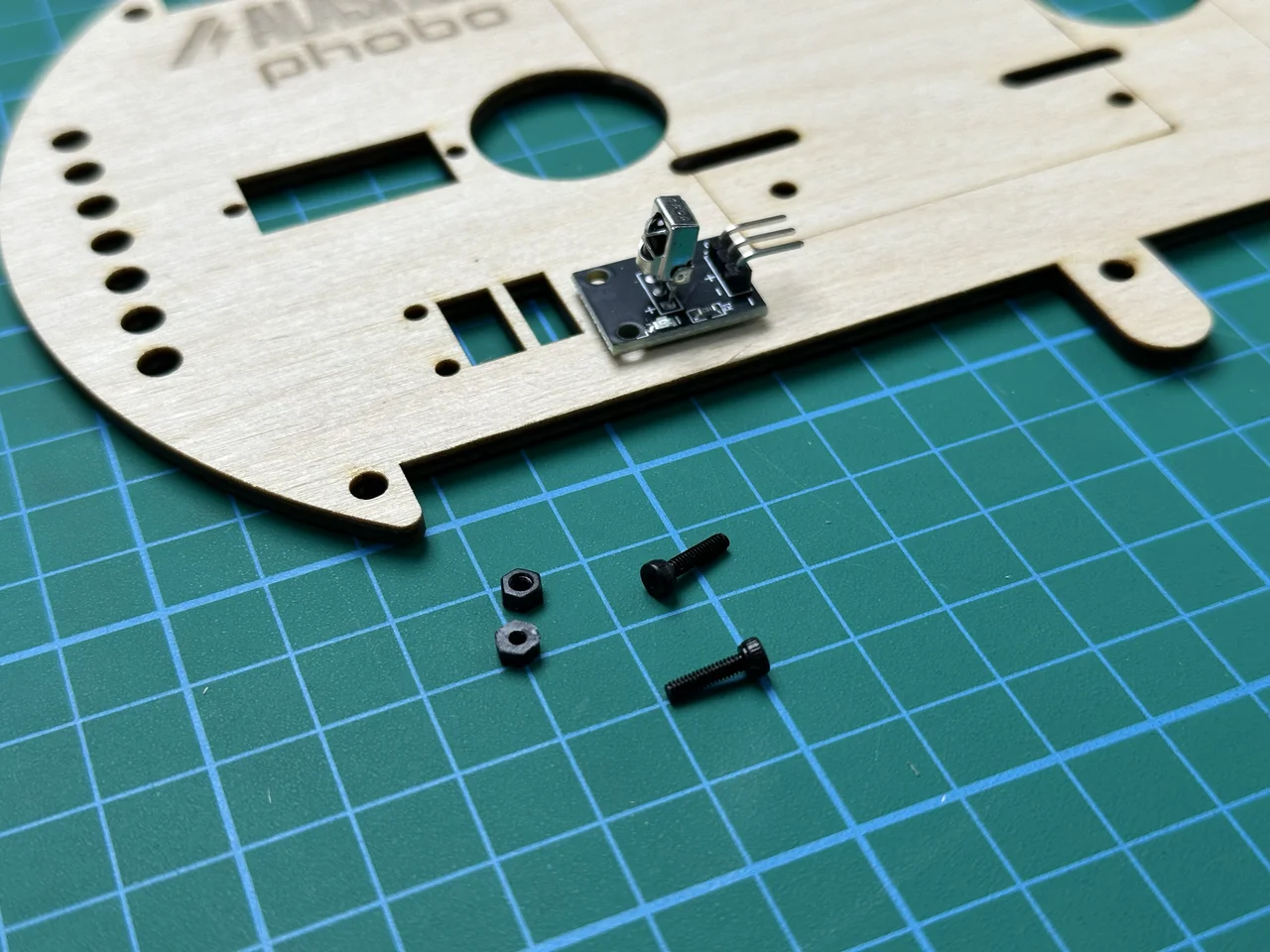
9.2. Расположение ИК-приёмника
ИК-приёмник устанавливается:
Место: спереди Floor 2 (над датчиками линии)
Ориентация: купол приёмника смотрит вперёд/вверх
9.3. Крепление ИК-приёмника
Вставьте 2 болта M2×8 мм сверху Floor 2
Наденьте ИК-приёмник на болты снизу
Накрутите 2 гайки M2 снизу
Затяните умеренно
Предупреждение
Проверьте распиновку вашего VS1838B! Порядок выводов может отличаться в зависимости от производителя. Обычная распиновка (слева направо, приёмник смотрит на вас): OUT (сигнал), VCC (+5V), GND (земля).
9.4. Подключение проводов
Подготовьте 3 провода Female-Female и подключите к ИК-приёмнику:
Серый → OUT (сигнал)
Фиолетовый → VCC (+5V)
Синий → GND (земля)
Примечание
Провода пока НЕ подключаем к Sensor Shield! Подключим в Шаге 22.
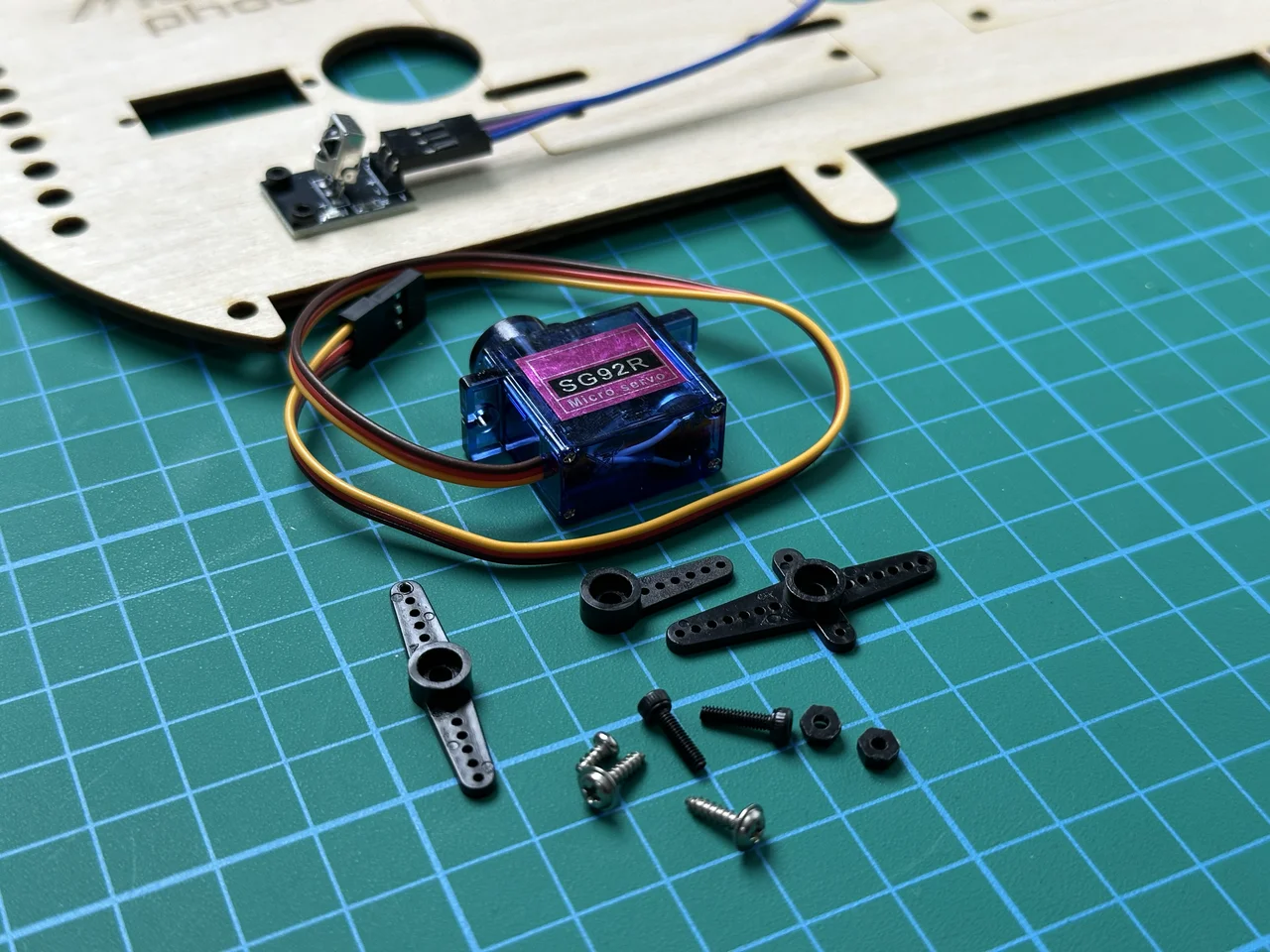
Шаг 10: Установка сервопривода на Floor 2
10.1. Подготовка сервопривода
Подготовьте:
SG92R сервопривод 9g (с комплектом рычагов и винтов)
2 болта M2×8 мм
2 гайки M2
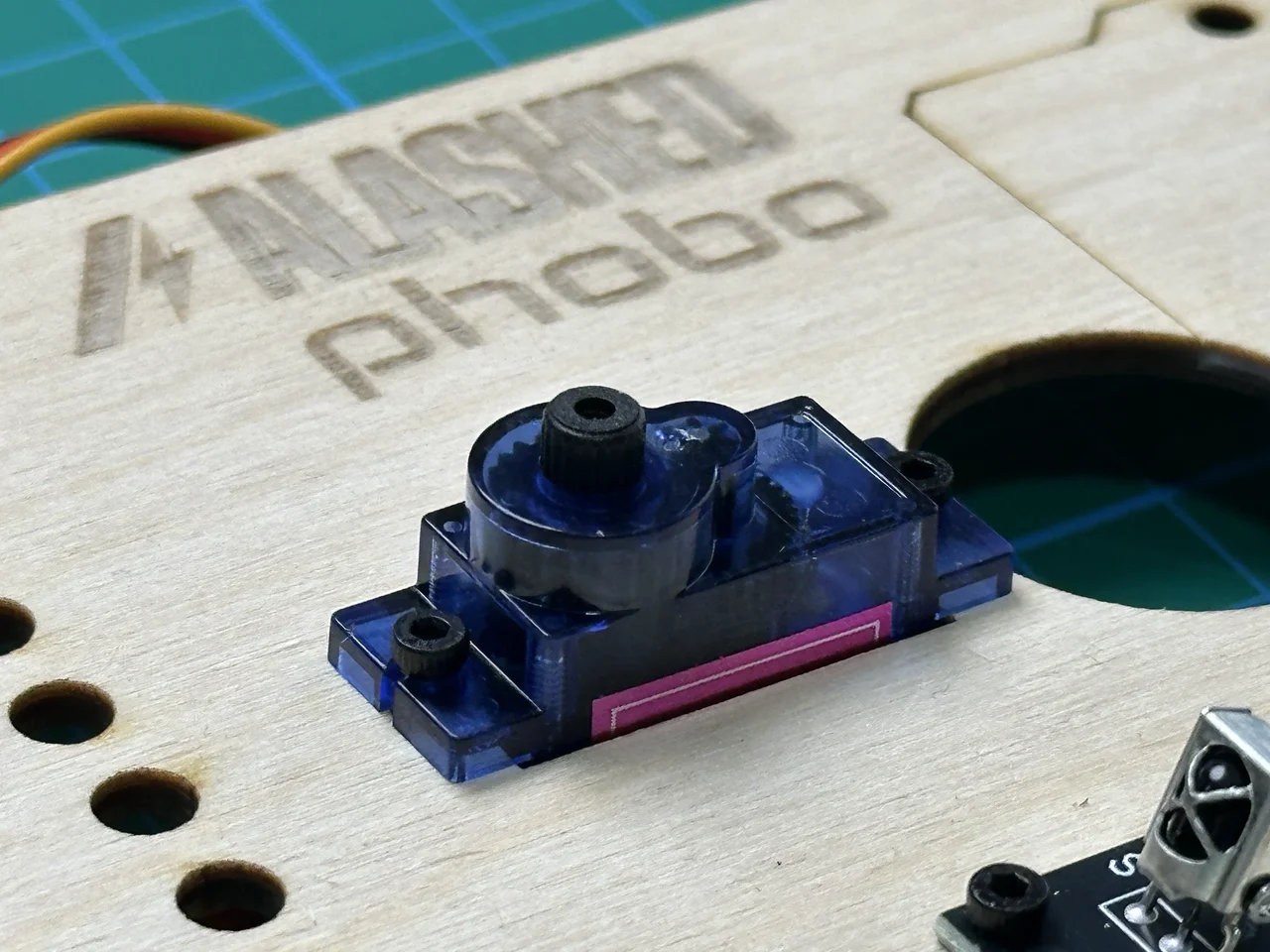
10.2. Расположение сервопривода
Сервопривод устанавливается:
Место: спереди Floor 2 (рядом с ИК-приёмником)
Ориентация: вал сервопривода смотрит вперёд (перпендикулярно платформе)
10.3. Крепление сервопривода
Вставьте 2 болта M2×8 мм сверху Floor 2 (в отверстия для серво)
Поставьте сервопривод на болты снизу (вал вперёд!)
Накрутите 2 гайки M2 снизу (в боковые отверстия серво)
Затяните умеренно
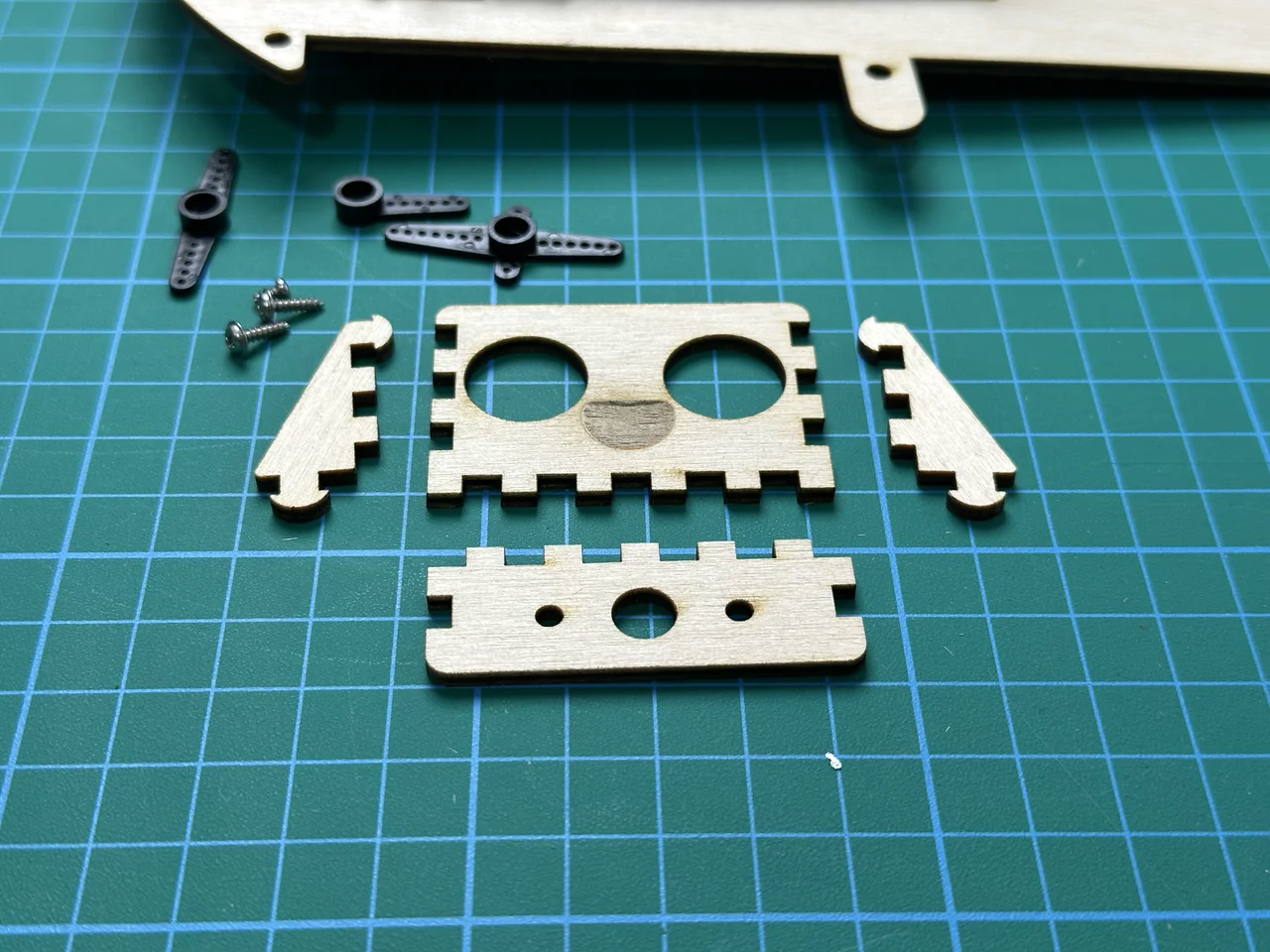
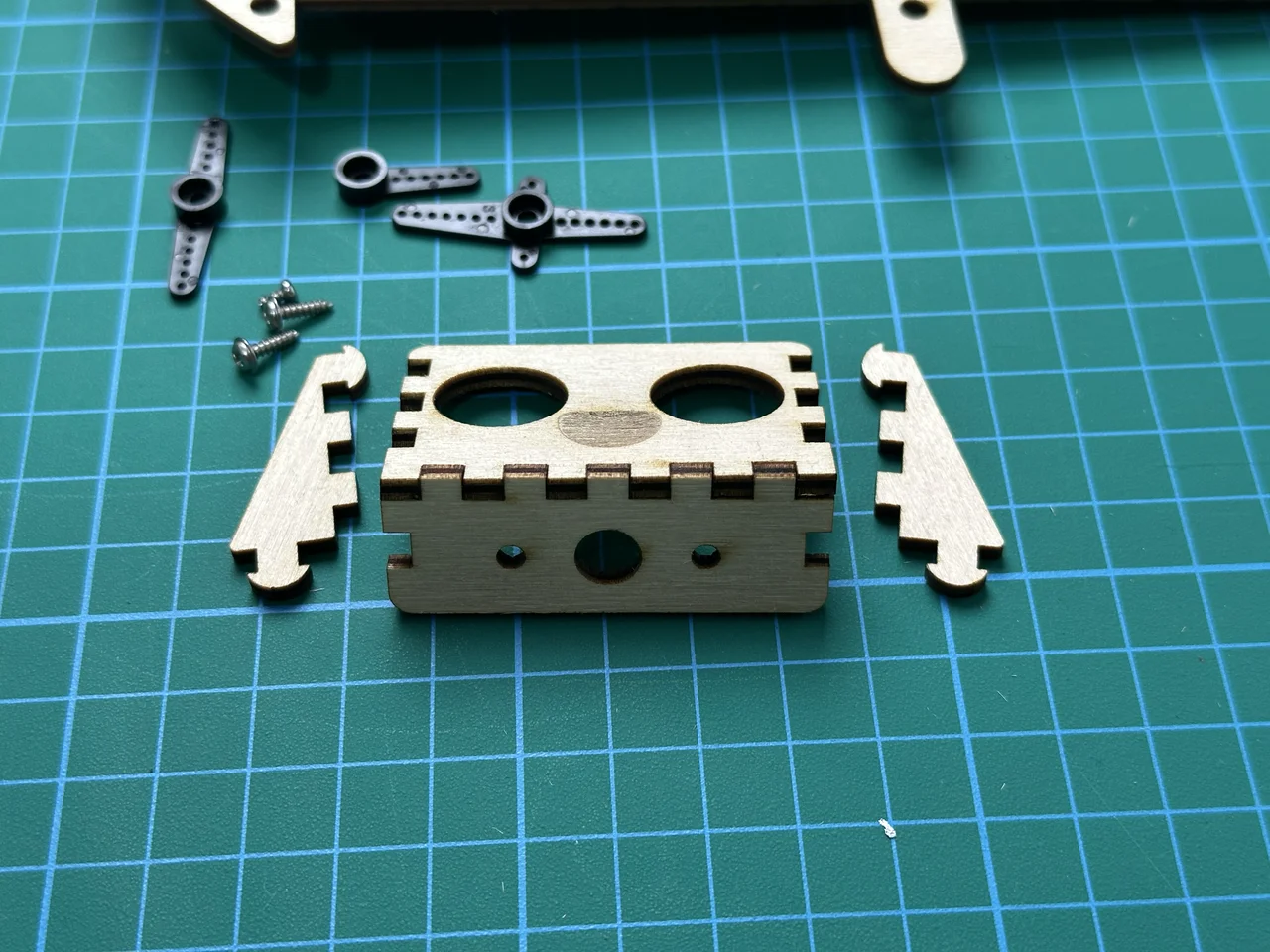
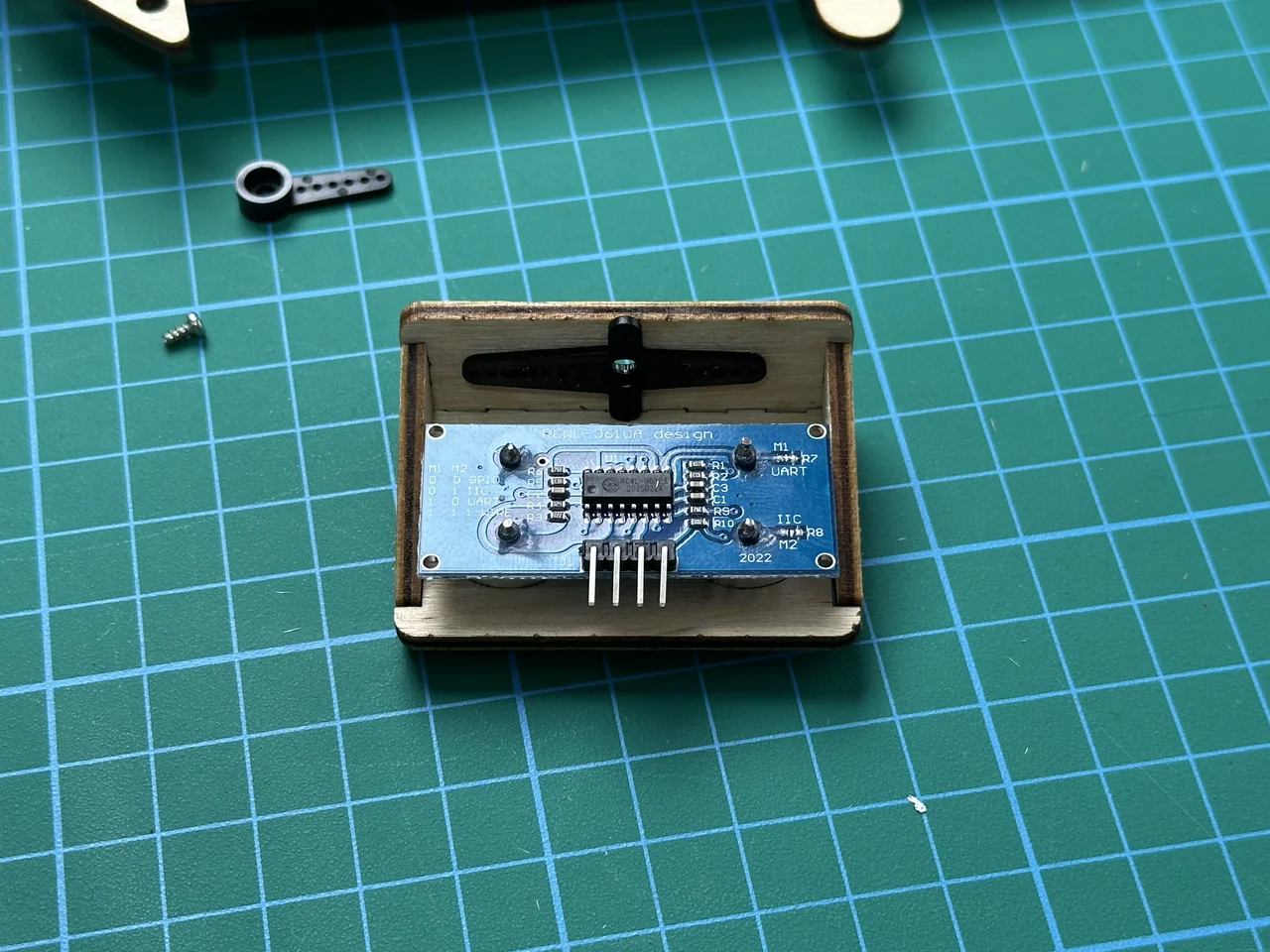
Шаг 11: Сборка головы для ультразвукового датчика
11.1. Подготовка деталей
Лазерно-резанная голова состоит из 4 деталей фанеры:
Нижняя пластина (основание, крепится к сервоприводу)
Передняя пластина (с отверстиями для RCWL-9610A)
Левая боковая пластина
Правая боковая пластина
11.2. Сборка нижней и передней пластин
Возьмите нижнюю пластину (основание)
Возьмите переднюю пластину (с отверстиями для датчика)
Вставьте выступы передней пластины в пазы нижней пластины
Защёлкните (должно плотно держаться)
11.3. Установка боковых пластин
Вставьте левую боковую пластину в пазы
Вставьте правую боковую пластину в пазы
Защёлкните обе боковые пластины
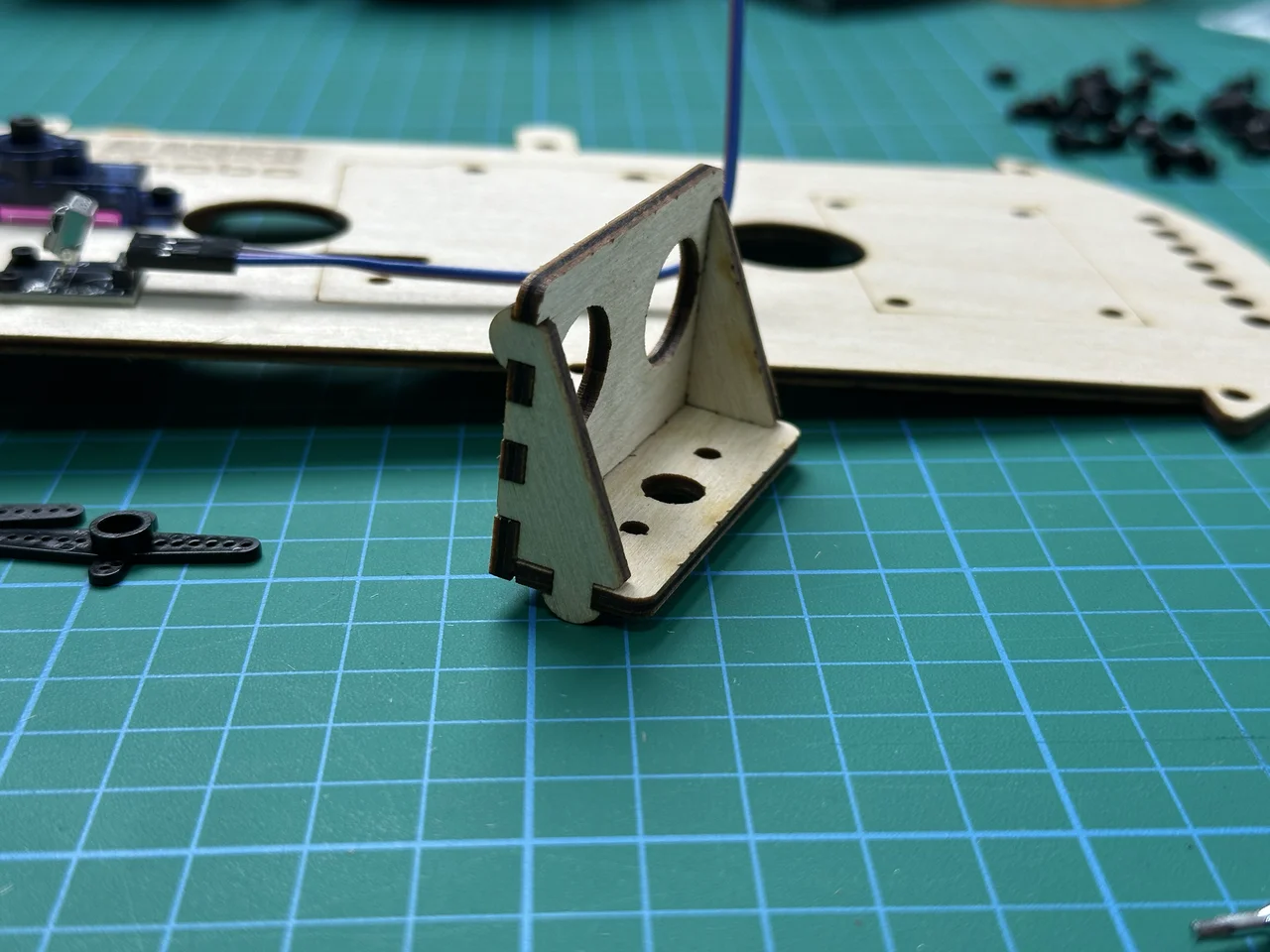
Примечание
Клей НЕ нужен! Конструкция держится за счёт пазов и выступов (соединение «на шип»).
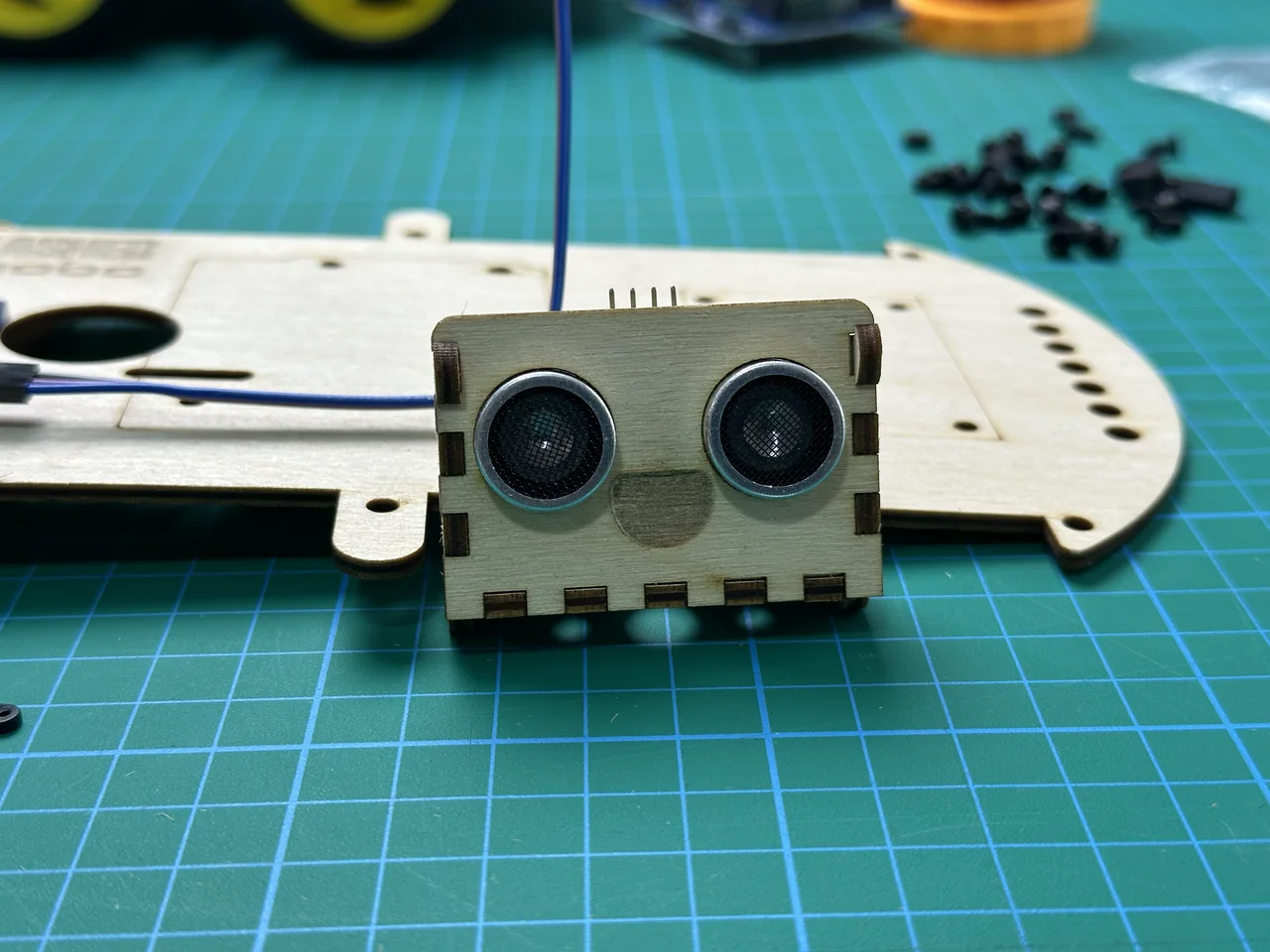
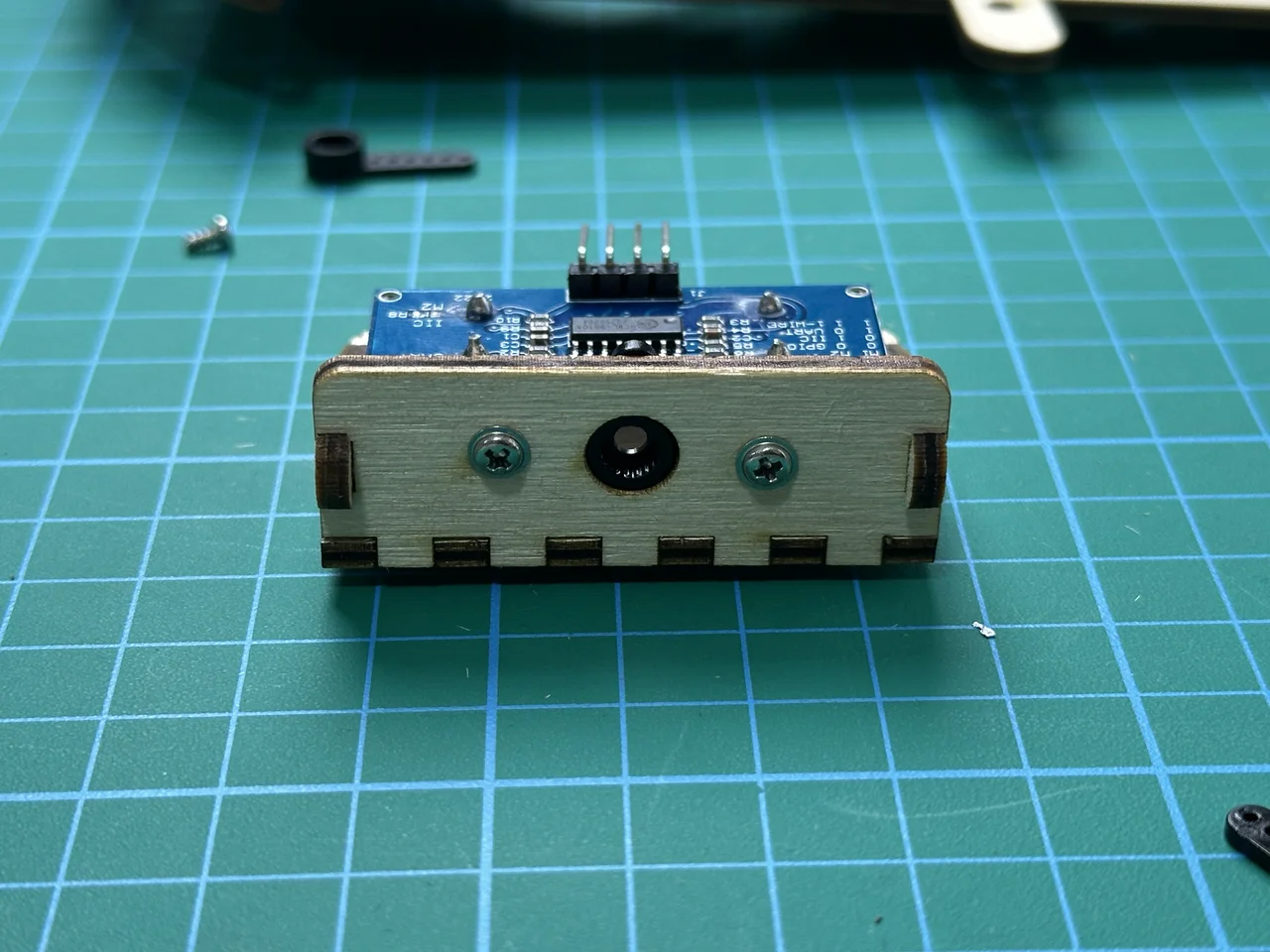
11.4. Установка RCWL-9610A в голову
Возьмите RCWL-9610A ультразвуковой датчик
Вставьте излучатель и приёмник в 2 круглых отверстия передней пластины
Протолкните плату датчика до упора (плата должна зайти за переднюю пластину)
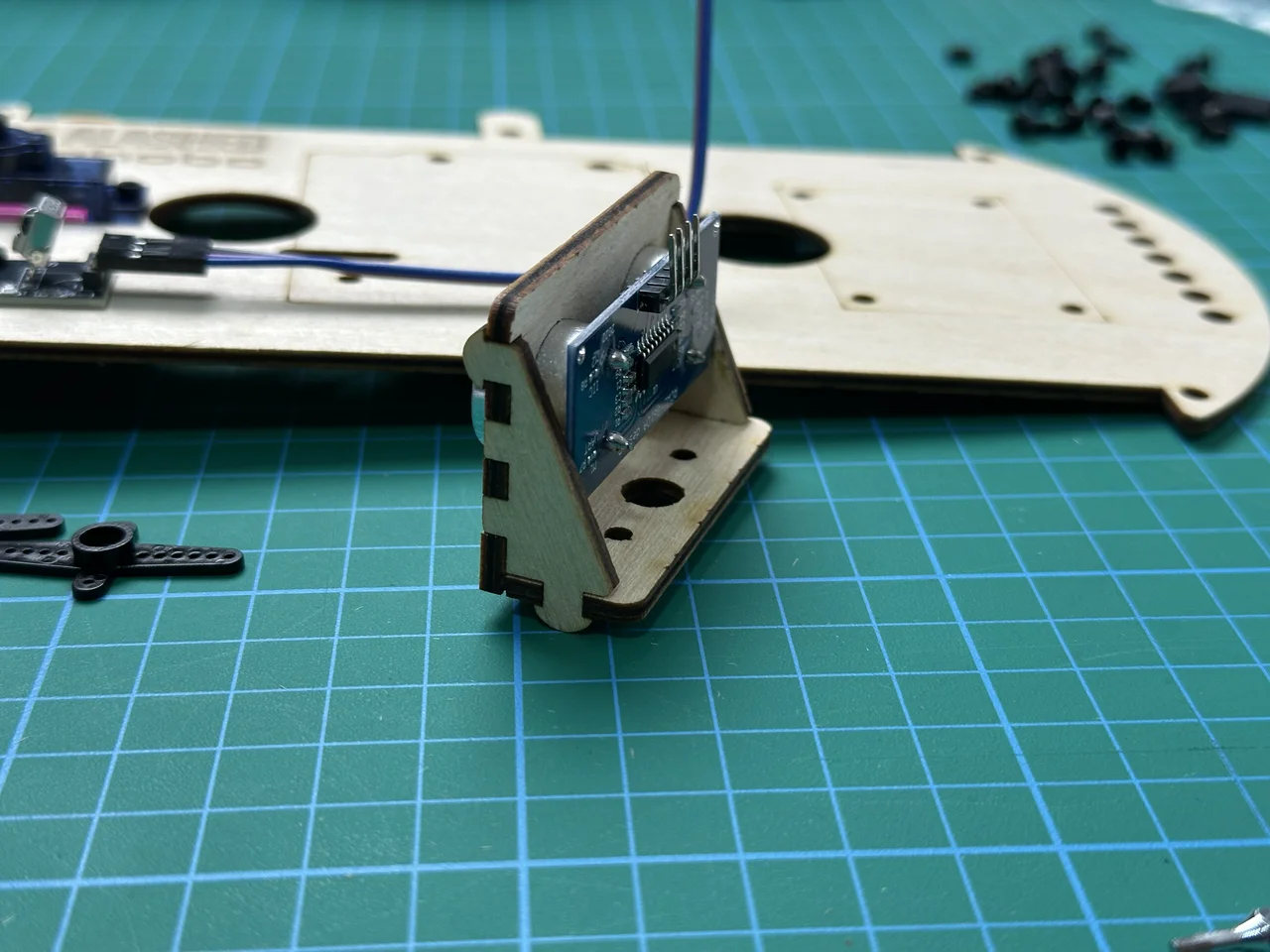
11.5. RCWL-9610A установлен
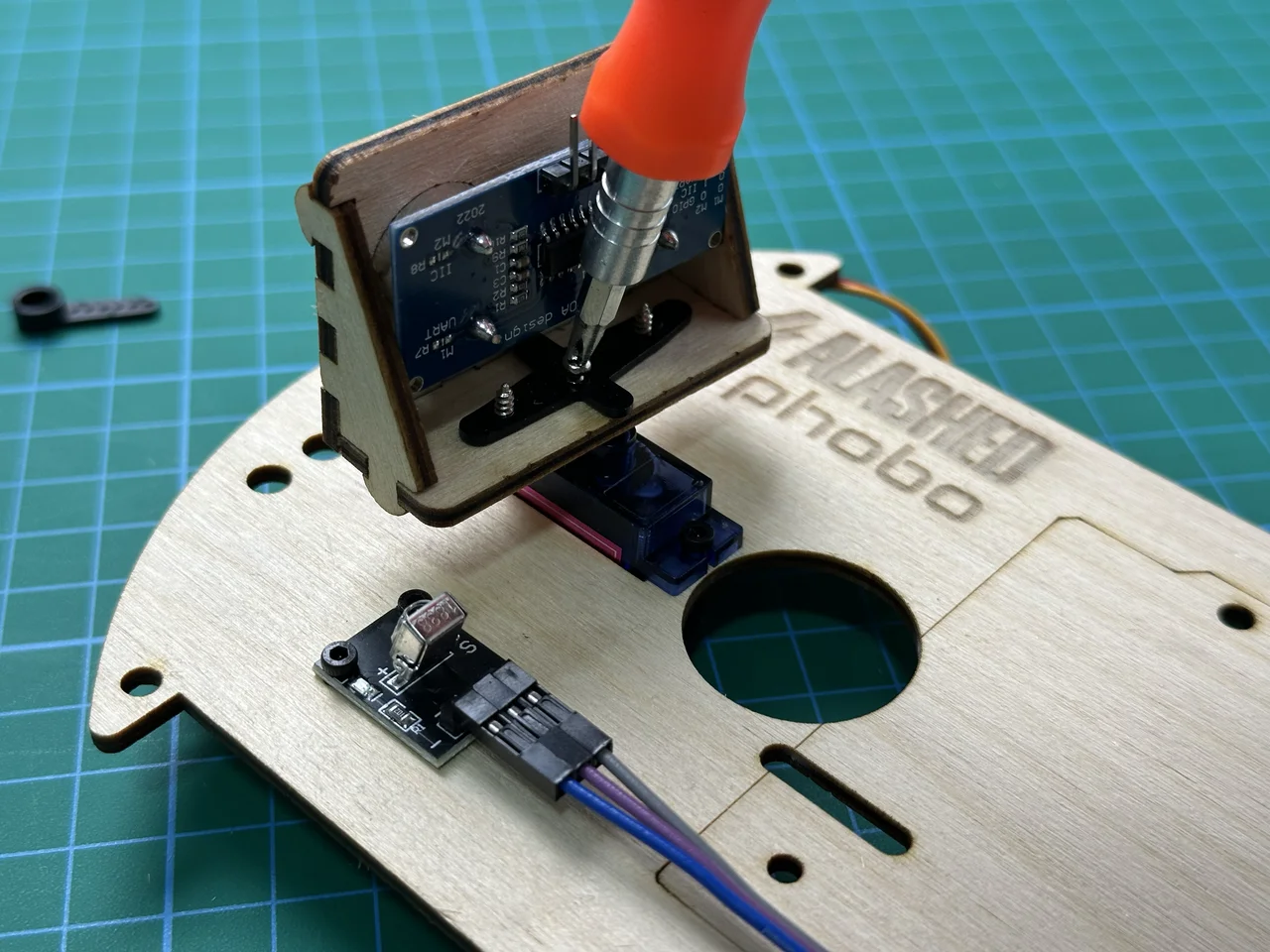
Шаг 12: Крепление головы к сервоприводу
12.1. Подготовка рычага серво
Из комплекта сервопривода возьмите:
Длинный рычаг (крестообразный или одинарный длинный)
2 маленьких винта (из комплекта серво)
12.2. Установка рычага на голову
Положите голову нижней пластиной вверх
Положите рычаг серво на нижнюю пластину (отверстие рычага по центру)
Вкрутите 2 маленьких винта из комплекта серво через фанеру в рычаг
12.3. Установка головы на вал сервопривода
Наденьте голову (с рычагом) на вал сервопривода
Ориентация: голова смотрит вперёд (датчик направлен вперёд)
Вкрутите маленький винт из комплекта серво (рычаг → вал серво)
Предупреждение
НЕ перетягивайте винт! Можно сорвать резьбу пластикового вала сервопривода.
12.4. Подключение проводов RCWL-9610A
Подготовьте 4 провода Female-Female для RCWL-9610A:
Белый → VCC (питание +5V)
Жёлтый → Trig (триггер)
Зелёный → Echo (эхо)
Чёрный → GND (земля)
Примечание
Провода пока НЕ подключаем к Sensor Shield! Подключим в Шаге 25.
Шаг 13: Подготовка Arduino Uno
13.1. Подготовка стоек для Arduino
Подготовьте:
Arduino Uno R3
4 нейлоновые стойки 10 мм (M3)
4 чёрных болта M3×6 мм
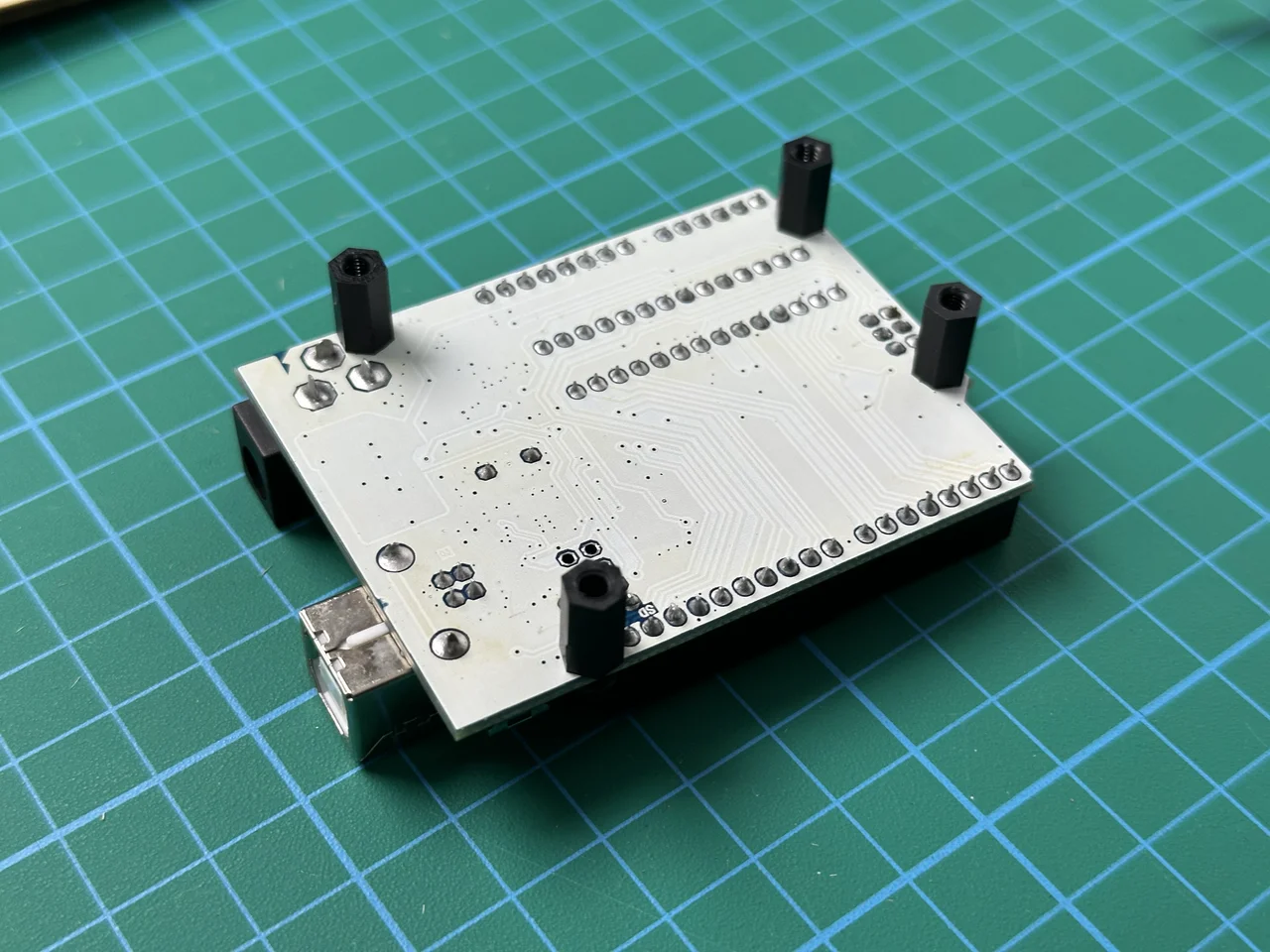
13.2. Установка стоек на Arduino
Переверните Arduino (пины вниз)
Вставьте 4 чёрных болта M3×6 мм снизу (в 4 отверстия по углам Arduino)
Сверху накрутите 4 нейлоновые стойки 10 мм
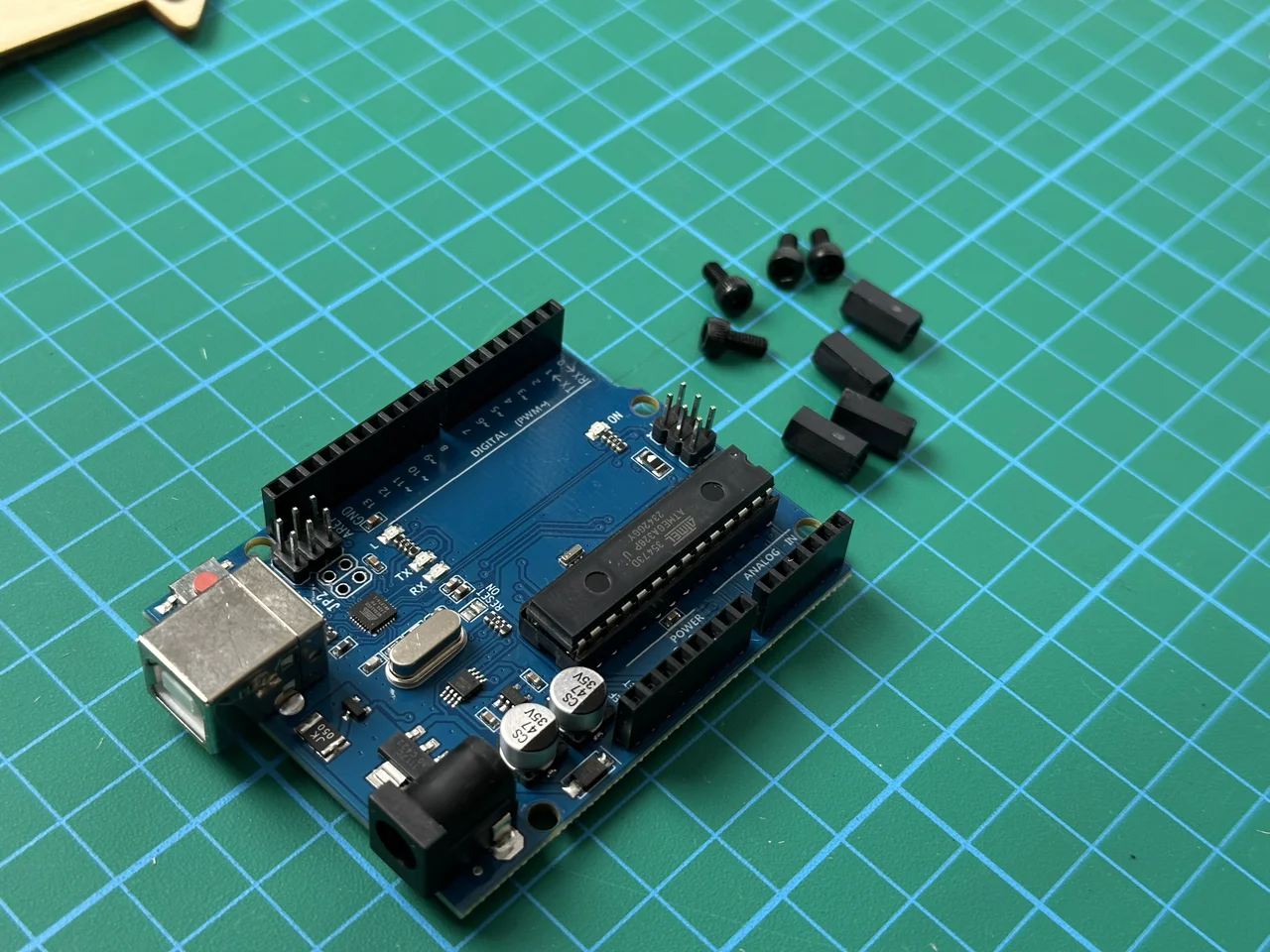
13.3. Стойки установлены
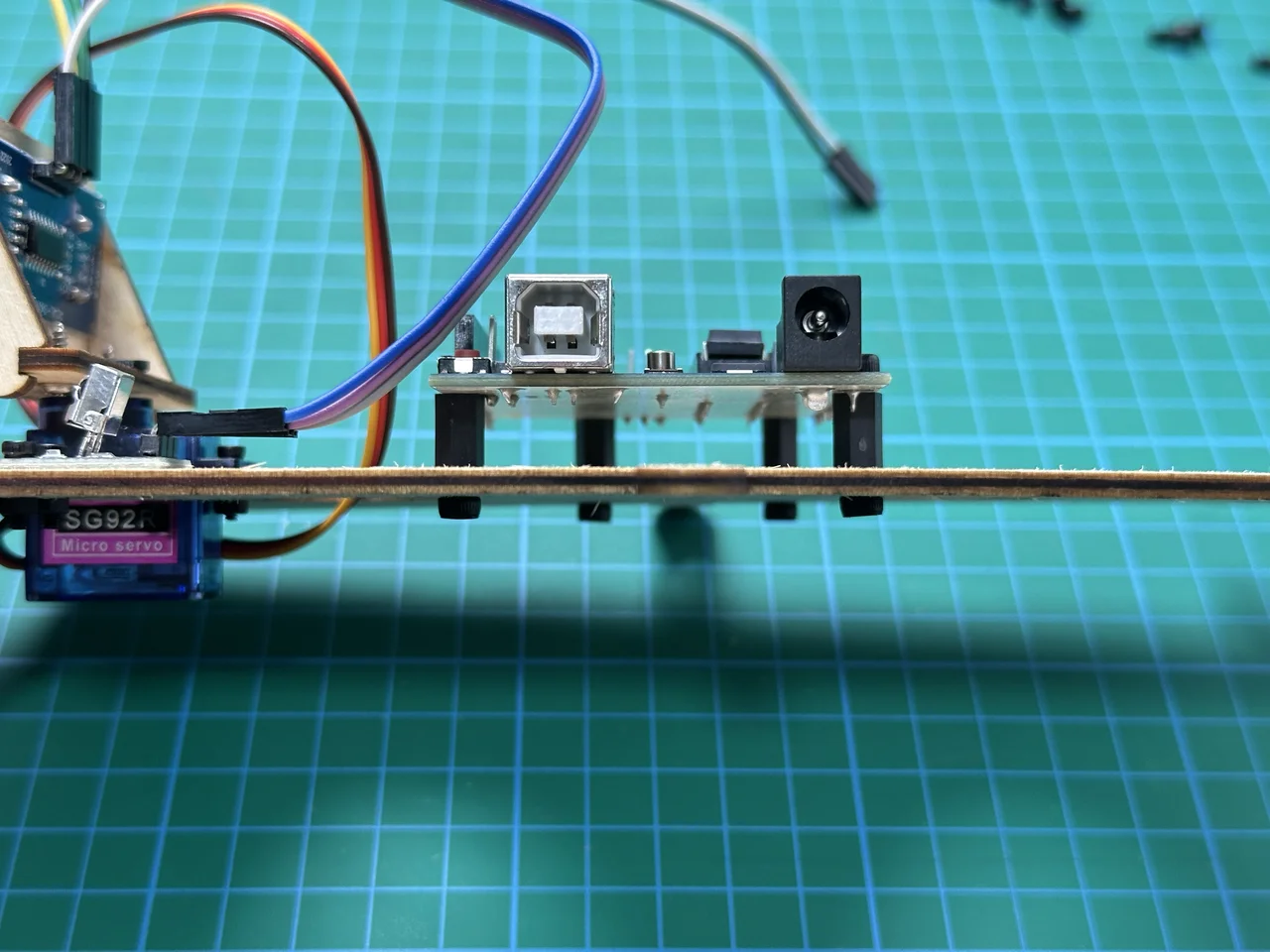
Шаг 14: Установка Arduino на Floor 2
14.1. Крепление Arduino к Floor 2
Поставьте Arduino (со стойками) на Floor 2
Совместите 4 стойки с 4 отверстиями в платформе
Снизу вкрутите 4 чёрных болта M3×6 мм (болты → стойки)
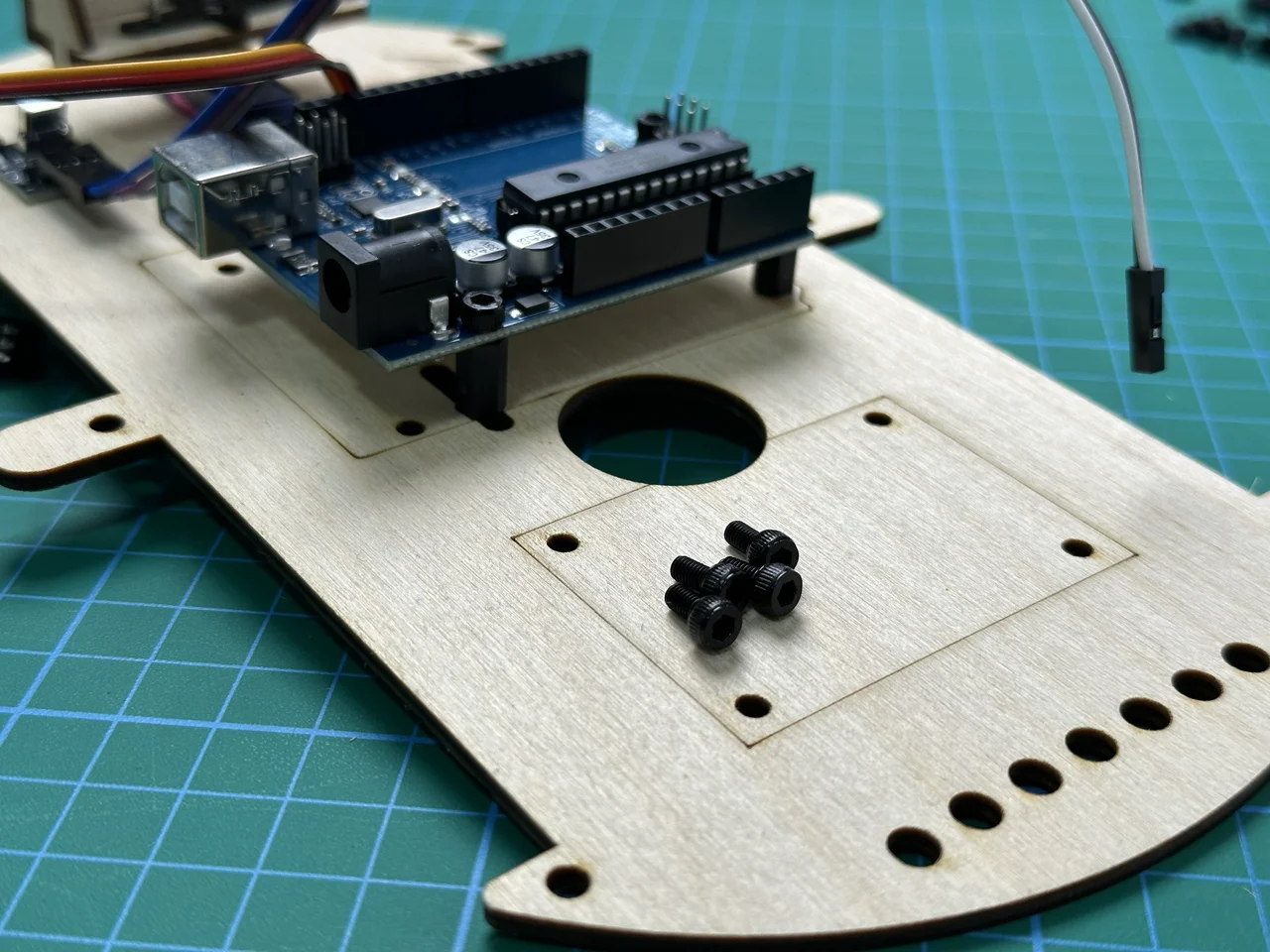
14.2. Arduino установлена
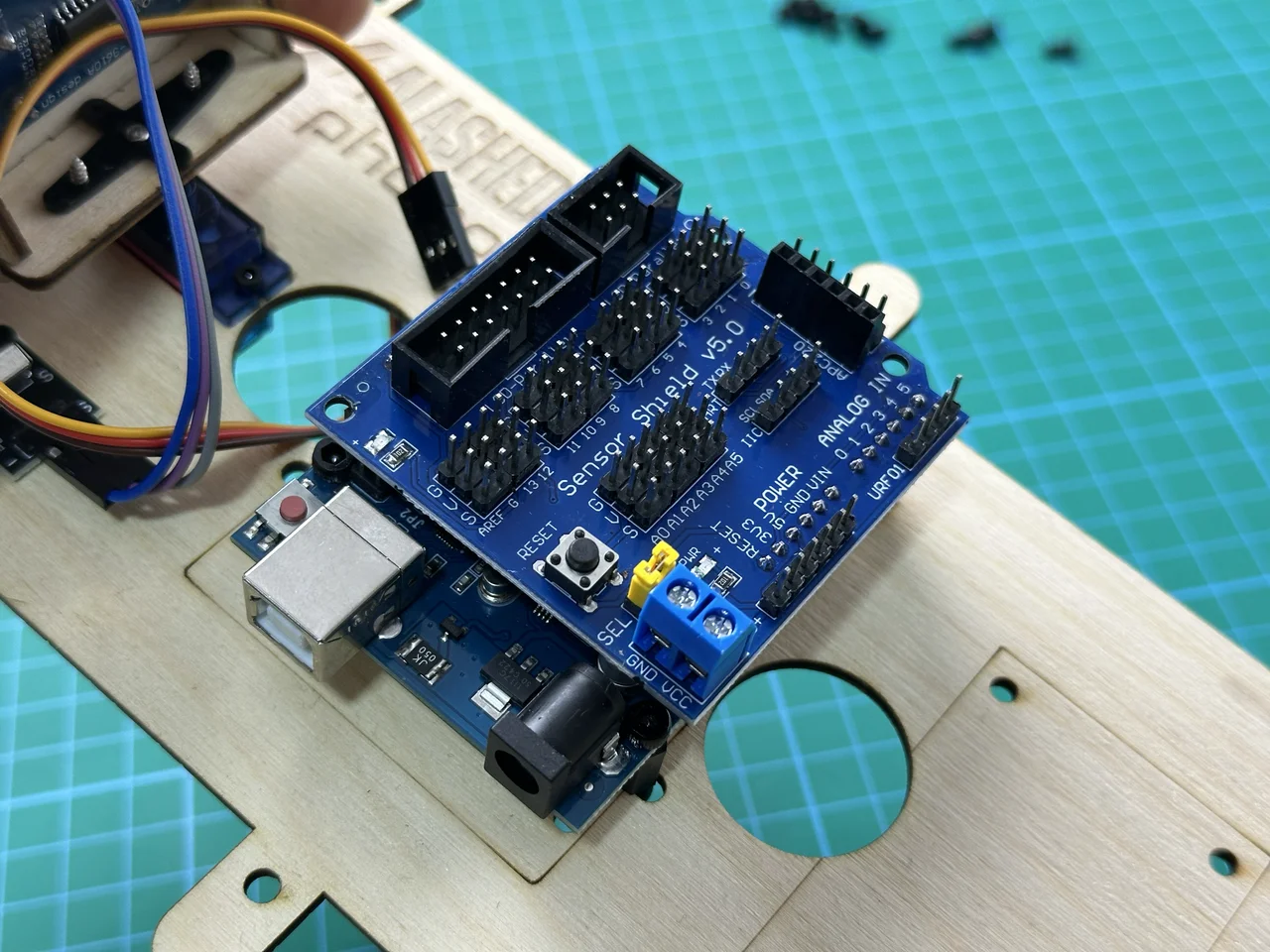
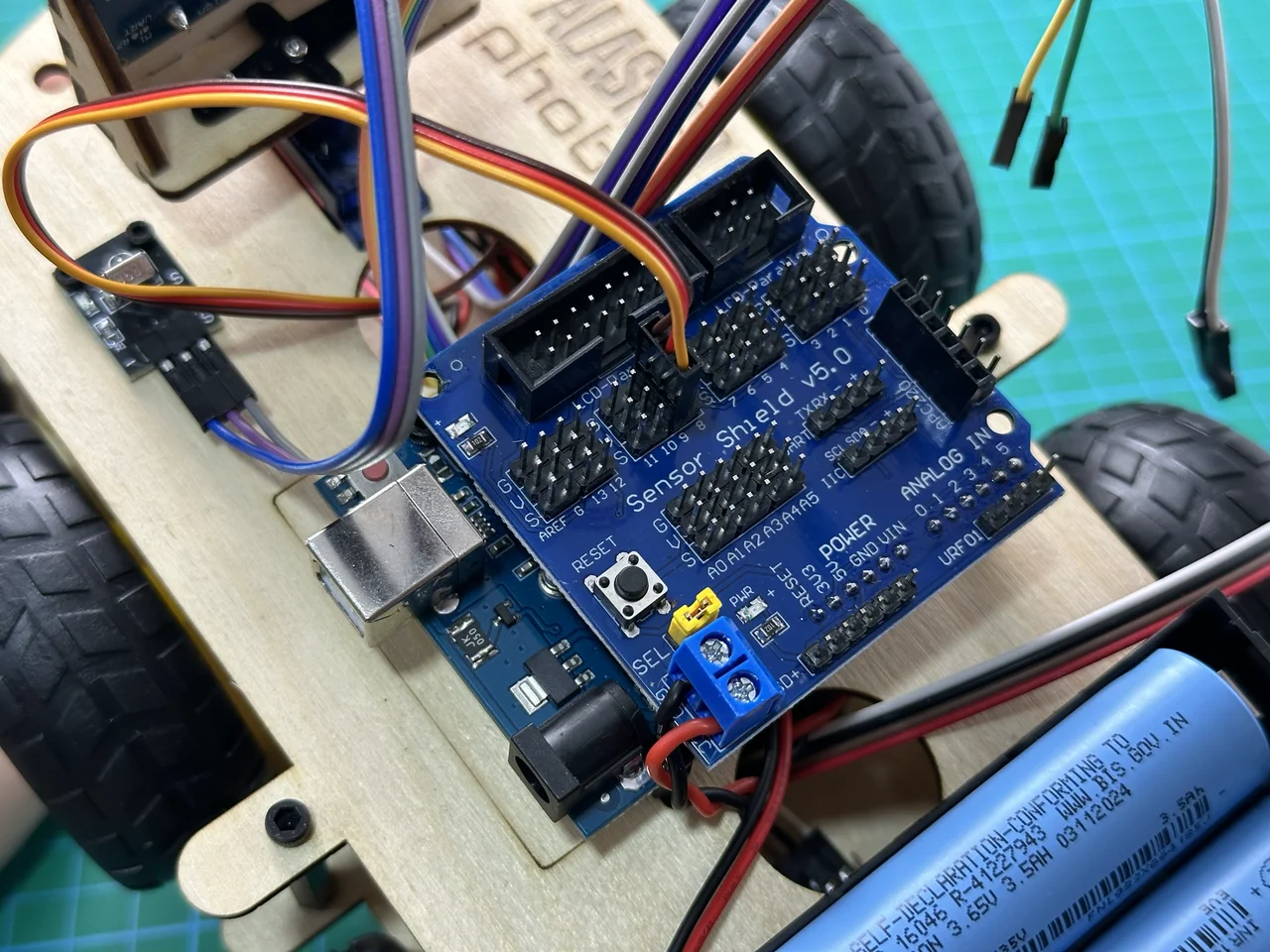
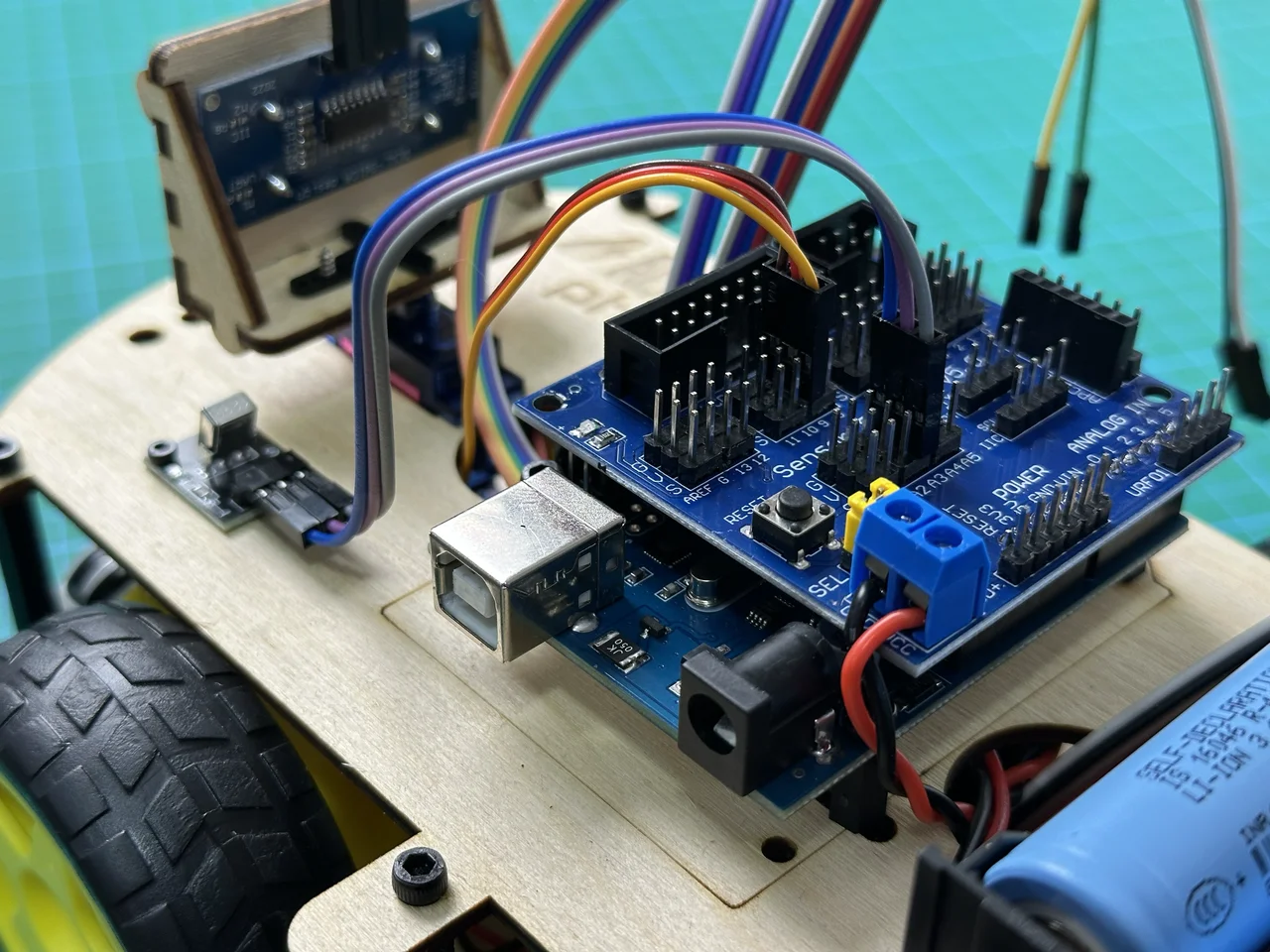
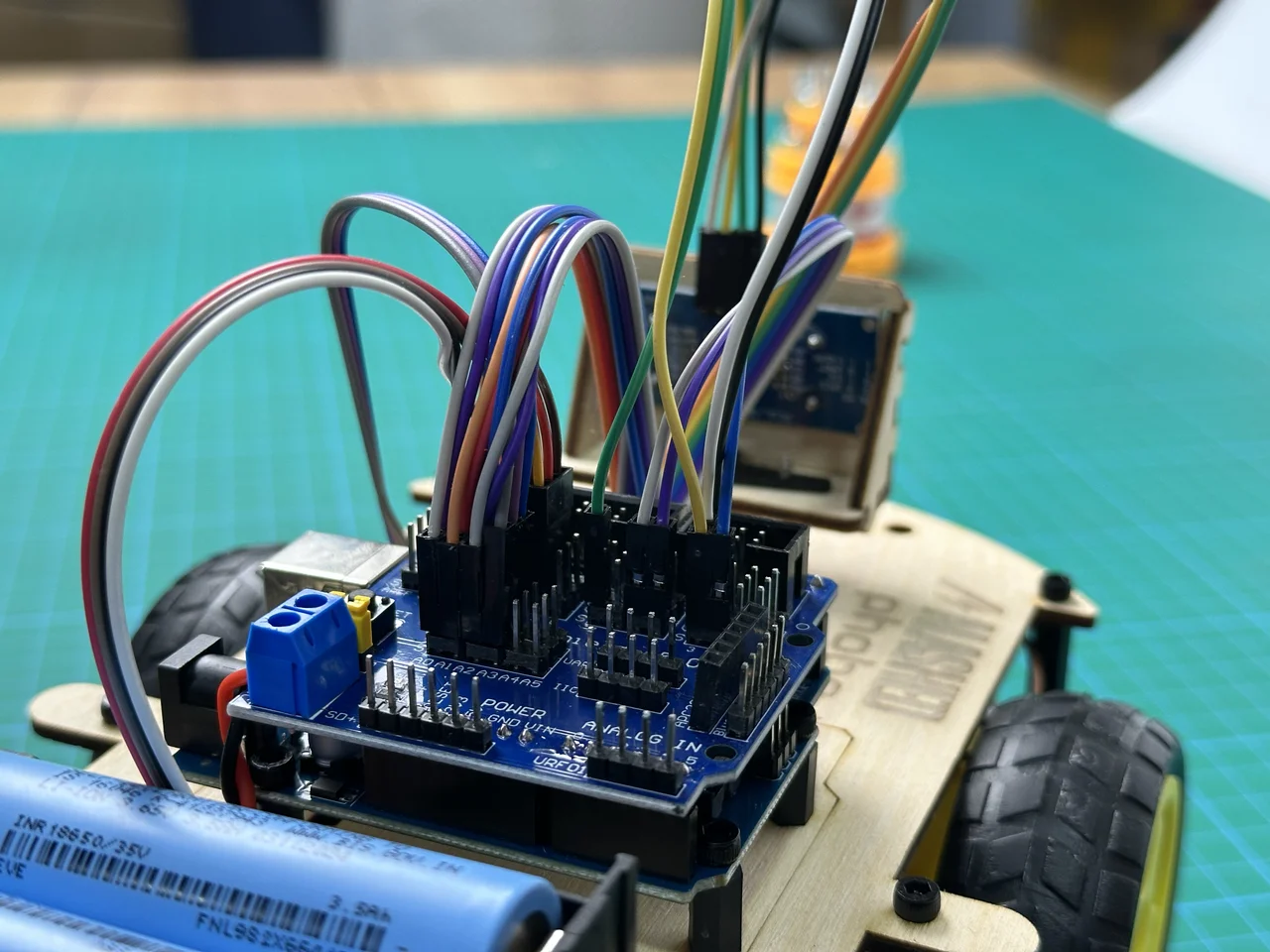
Шаг 15: Установка Sensor Shield V5 на Arduino
15.1. Что такое Sensor Shield V5?
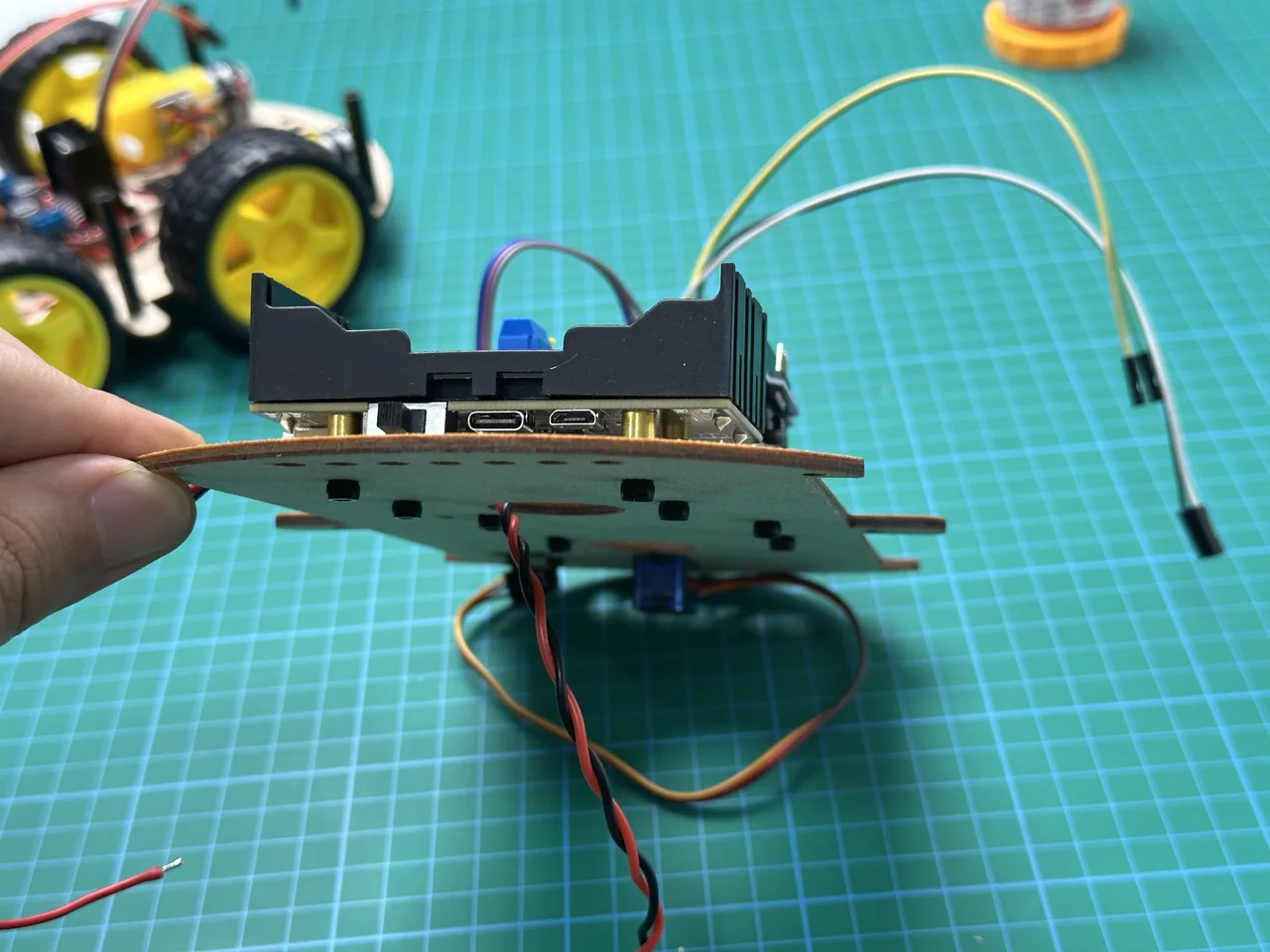
Sensor Shield V5 — это плата расширения, которая устанавливается поверх Arduino Uno. Она упрощает подключение датчиков и сервоприводов, предоставляя удобные 3-пиновые разъёмы G-V-S для каждого цифрового и аналогового пина.
Преимущества Sensor Shield:
✅ Каждый пин имеет готовый разъём G (GND) - V (VCC +5V) - S (Signal)
✅ Не нужно путаться в проводах питания (GND и +5V распределяются автоматически)
✅ Все датчики подключаются стандартными 3-проводными шлейфами
✅ Питание распределяется на все разъёмы одновременно
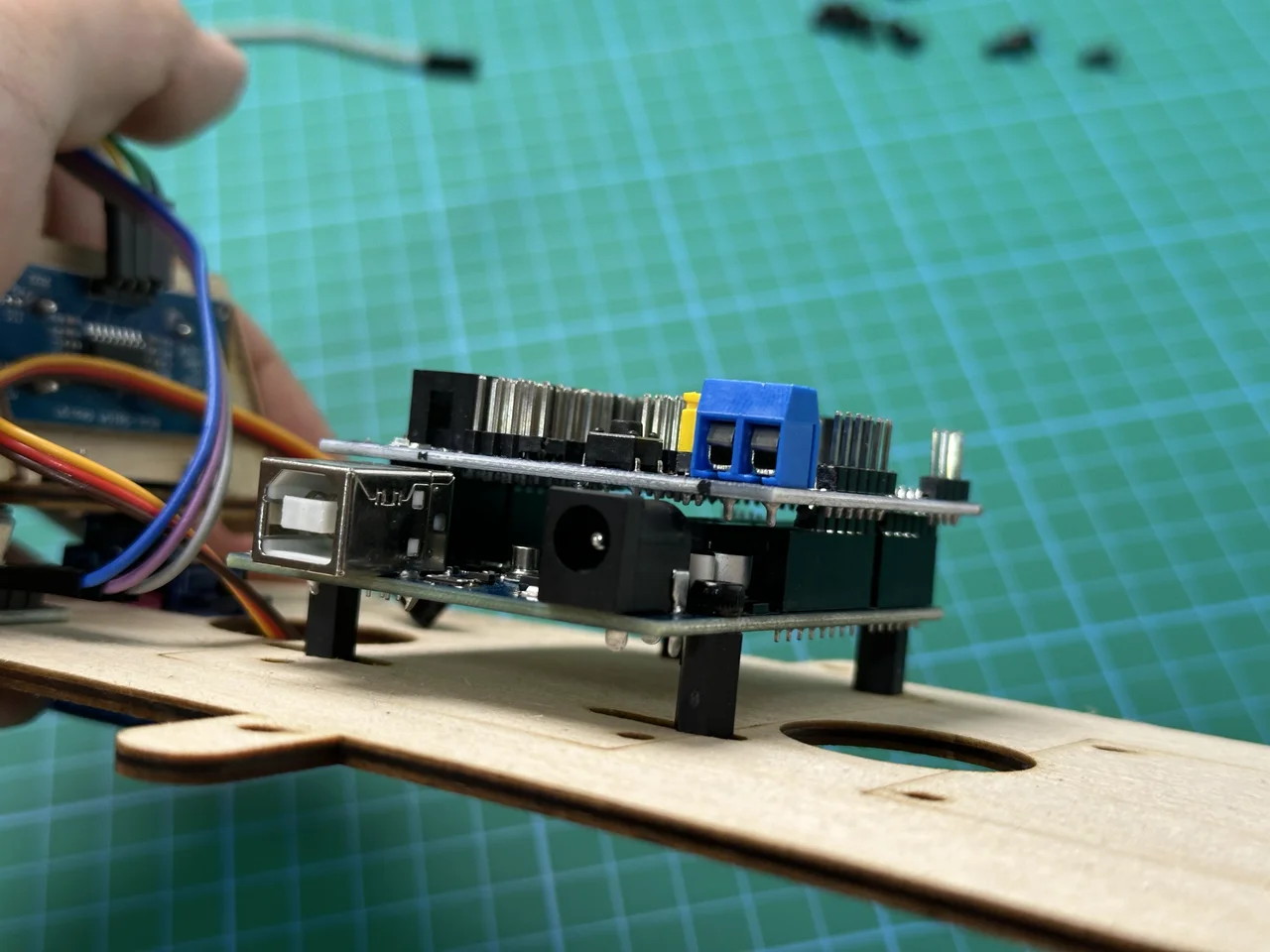
15.2. Установка Sensor Shield
Возьмите Sensor Shield V5
Выровняйте контакты Shield с гнёздами Arduino
Аккуратно надавите сверху (все пины должны войти в разъёмы!)
Предупреждение
Осторожно! Не погните пины! Выровняйте Shield параллельно Arduino перед установкой.
15.3. Sensor Shield установлен
Этап 3: Соединение ярусов и проводка
Шаг 16: Предварительная проводка L298N к Sensor Shield
16.1. Подготовка проводов управления
Перед установкой Floor 2 на Floor 1 нужно предварительно подключить управляющие провода от L298N.
Подготовьте 6 проводов Female-Female:
Серый
Фиолетовый
Синий
Зелёный
Жёлтый
Оранжевый
16.2. Предварительная раскладка
Пока НЕ устанавливайте Floor 2! Просто проложите провода:
Примечание
Финальное подключение выполним в Шагах 26-27 после установки Floor 2 и батарейного отсека.
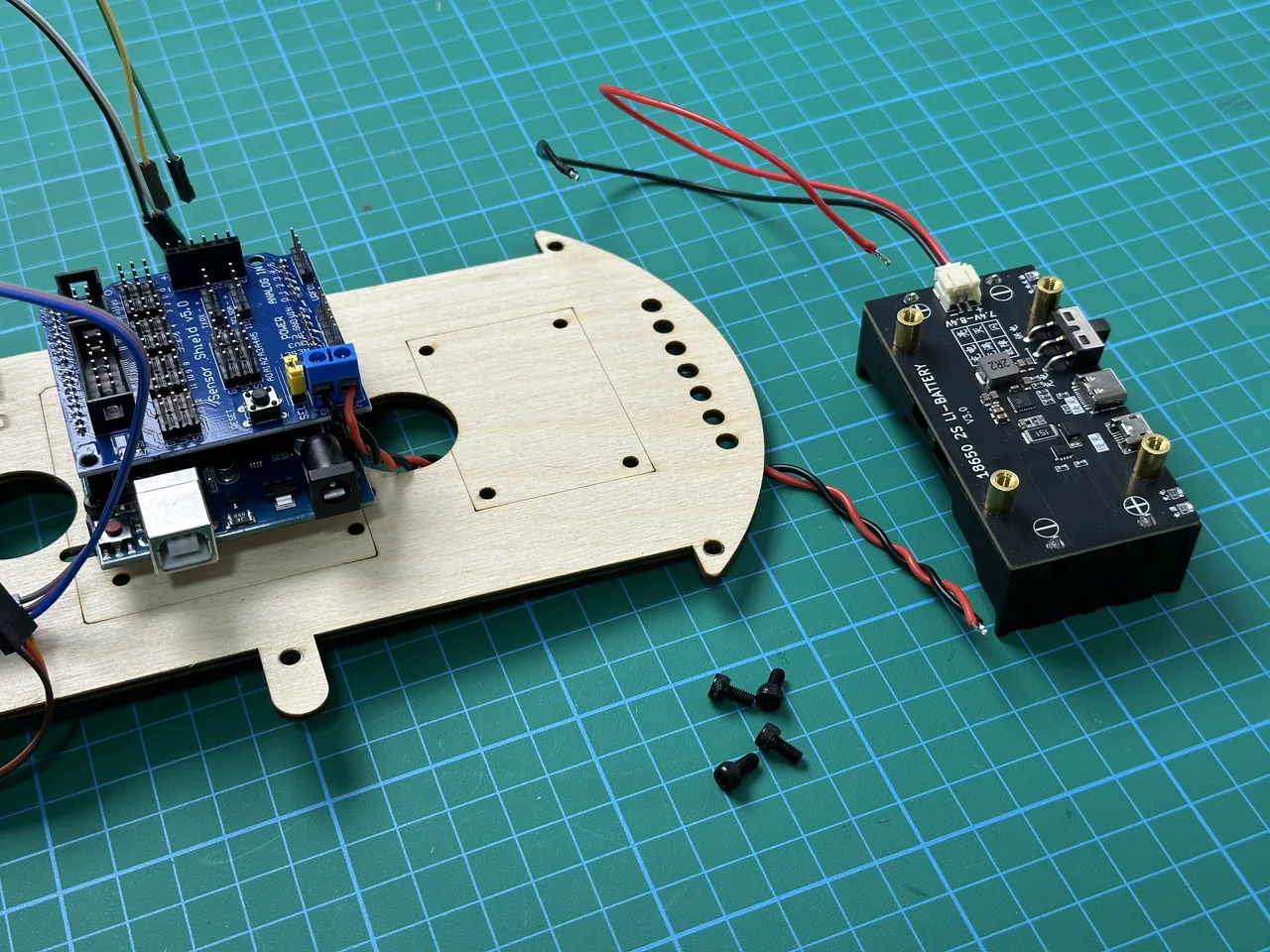
Шаг 17: Установка батарейного отсека
17.1. Подготовка батарейного отсека
Подготовьте:
Батарейный отсек 2×18650 (с выключателем и проводами)
4 чёрных болта M3×6 мм
17.2. Размещение холдера
Холдер устанавливается:
Место: сзади Floor 2 (над HM-10)
Ориентация: провода вниз, переключатель доступен сбоку
Примечание
Переключатель питания: Холдер имеет встроенный переключатель ON/OFF. Это главный выключатель всего робота! Держите его в положении OFF до окончания сборки.
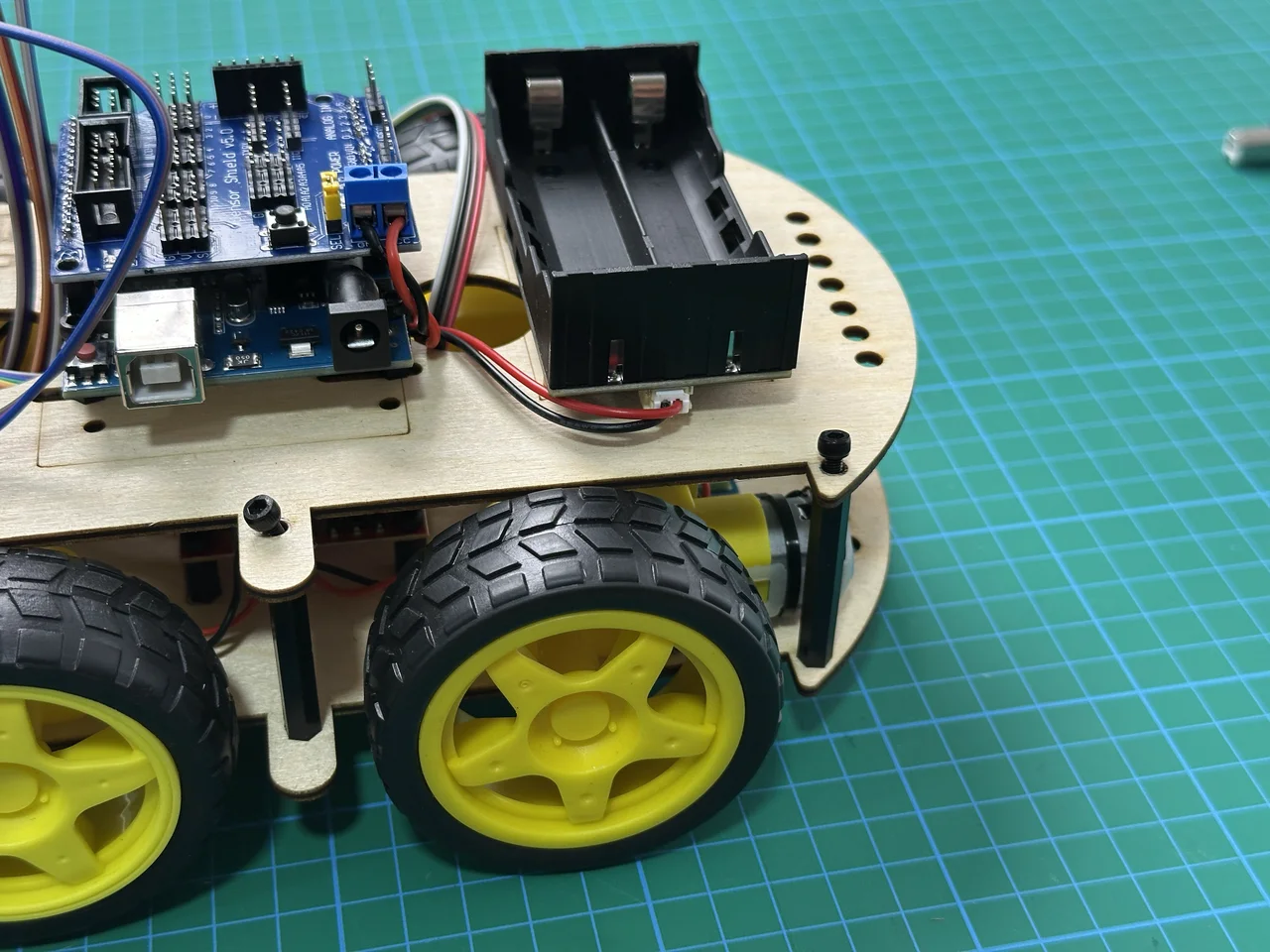
17.3. Крепление холдера
Поставьте холдер на Floor 2 (4 отверстия)
Вкрутите 4 чёрных болта M3×6 мм снизу (болты → холдер)
Затяните умеренно
Убедитесь, что переключатель доступен (не заблокирован)
Опасно
НЕ ВСТАВЛЯЙТЕ БАТАРЕИ! Только в Шаге 20 после всех проверок. Переключатель должен быть в положении OFF.
Шаг 18: Подключение питания (батареи → L298N → Sensor Shield)
Опасно
БАТАРЕИ ПОКА НЕ ВСТАВЛЯЕМ! Только подключаем провода.
18.1. Схема питания робота Фобо
2× Li-ion 18650 (7.4-8.4V)
↓
Переключатель ON/OFF (на холдере)
↓
L298N клемма 12V (питание драйвера + моторы)
↓
L298N встроенный регулятор 5V
↓
Провод AWG (красный+чёрный)
↓
Sensor Shield V5
↓
Arduino Uno + все датчики (5V)
18.2. Подключение проводов батарей к L298N
От батарейного отсека идут 2 провода:
Красный провод (+) → вставьте в клемму +12V на L298N
Чёрный провод (−) → вставьте в клемму GND (рядом с +12V)
Затяните винтовые клеммы
18.3. Подключение 5V к Sensor Shield
Используем AWG кабель (красный + чёрный толстые провода):
Один конец к L298N: - Красный → вывод +5V - Чёрный → вывод GND (рядом с +5V)
Другой конец к Sensor Shield: - Красный → любой разъём + (VCC) - Чёрный → любой разъём − (GND)
Примечание
Все разъёмы + и − на Sensor Shield соединены между собой! Можно подключить питание к любому разъёму.
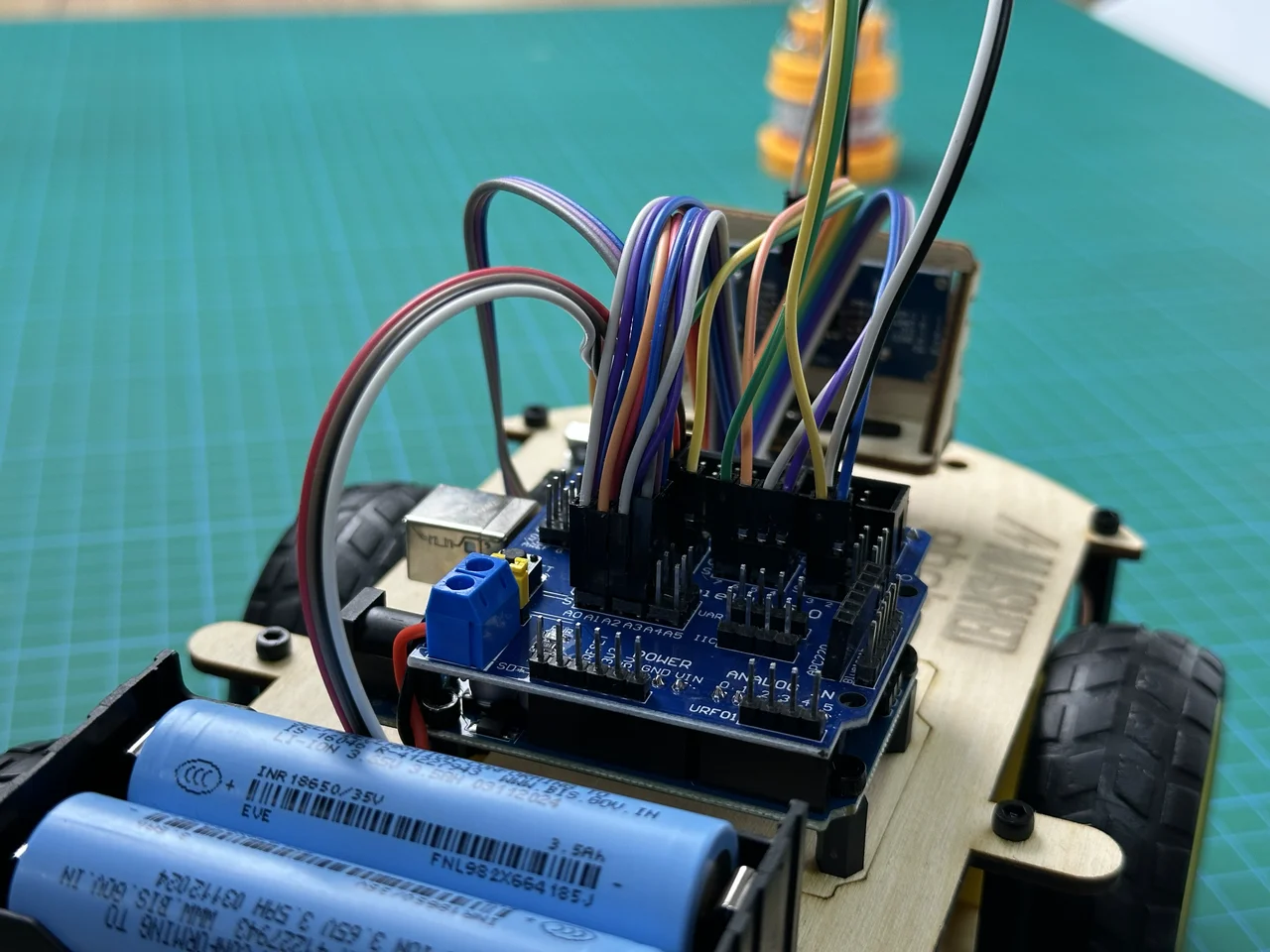
Шаг 19: Соединение Floor 2 с Floor 1
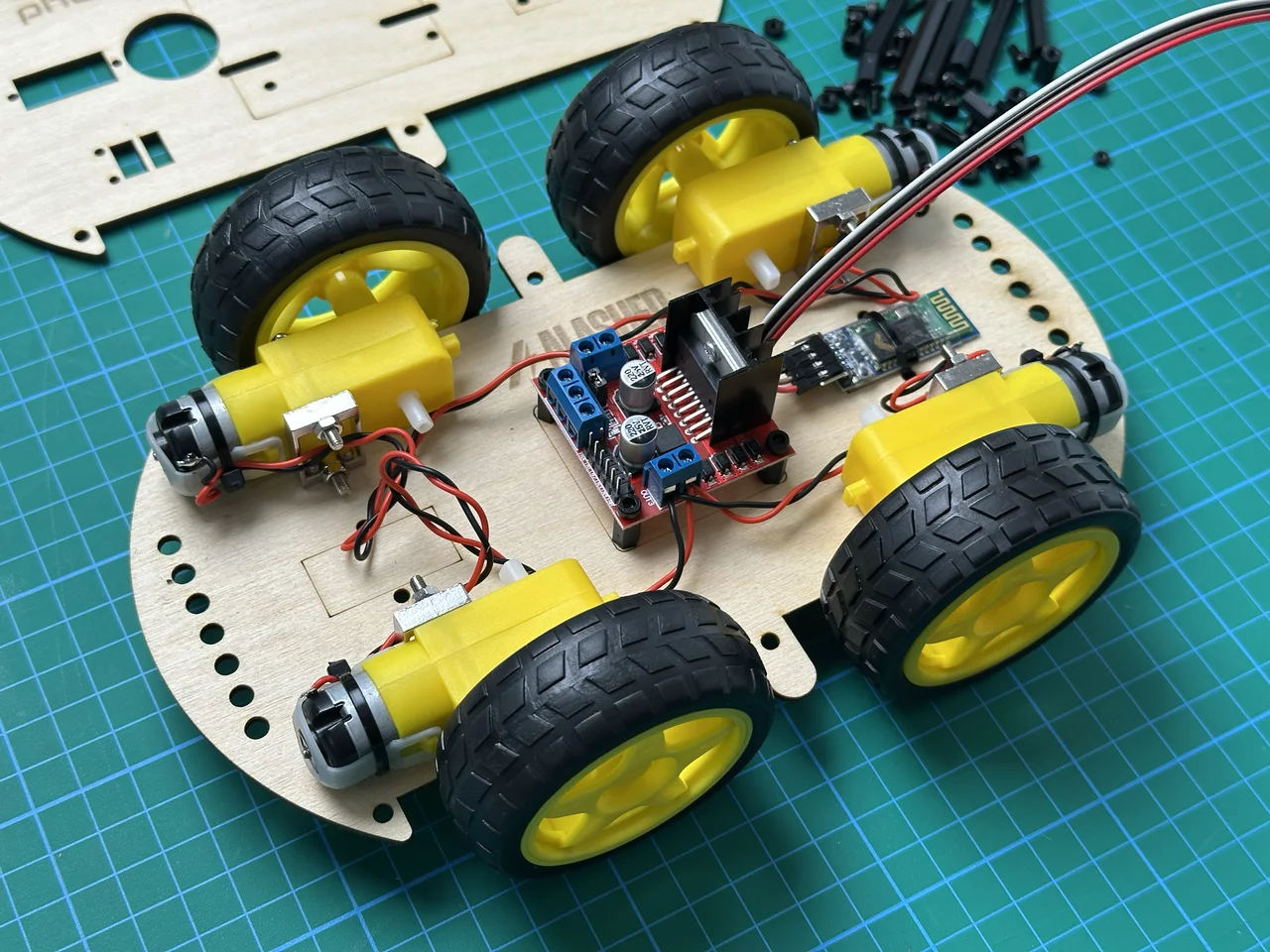
19.1. Установка Floor 2
Возьмите Floor 2 с установленными компонентами
Поставьте на 6 стоек 40 мм (4 по углам, 2 посередине)
Совместите 6 отверстий в Floor 2 с 6 стойками
Провода должны свободно проходить между этажами
19.2. Крепление к стойкам
Подготовьте 6 чёрных болтов M3×6 мм.
Для каждой из 6 стоек:
Вкрутите чёрный болт M3×6 мм сверху (болт → стойка)
Затяните умеренно
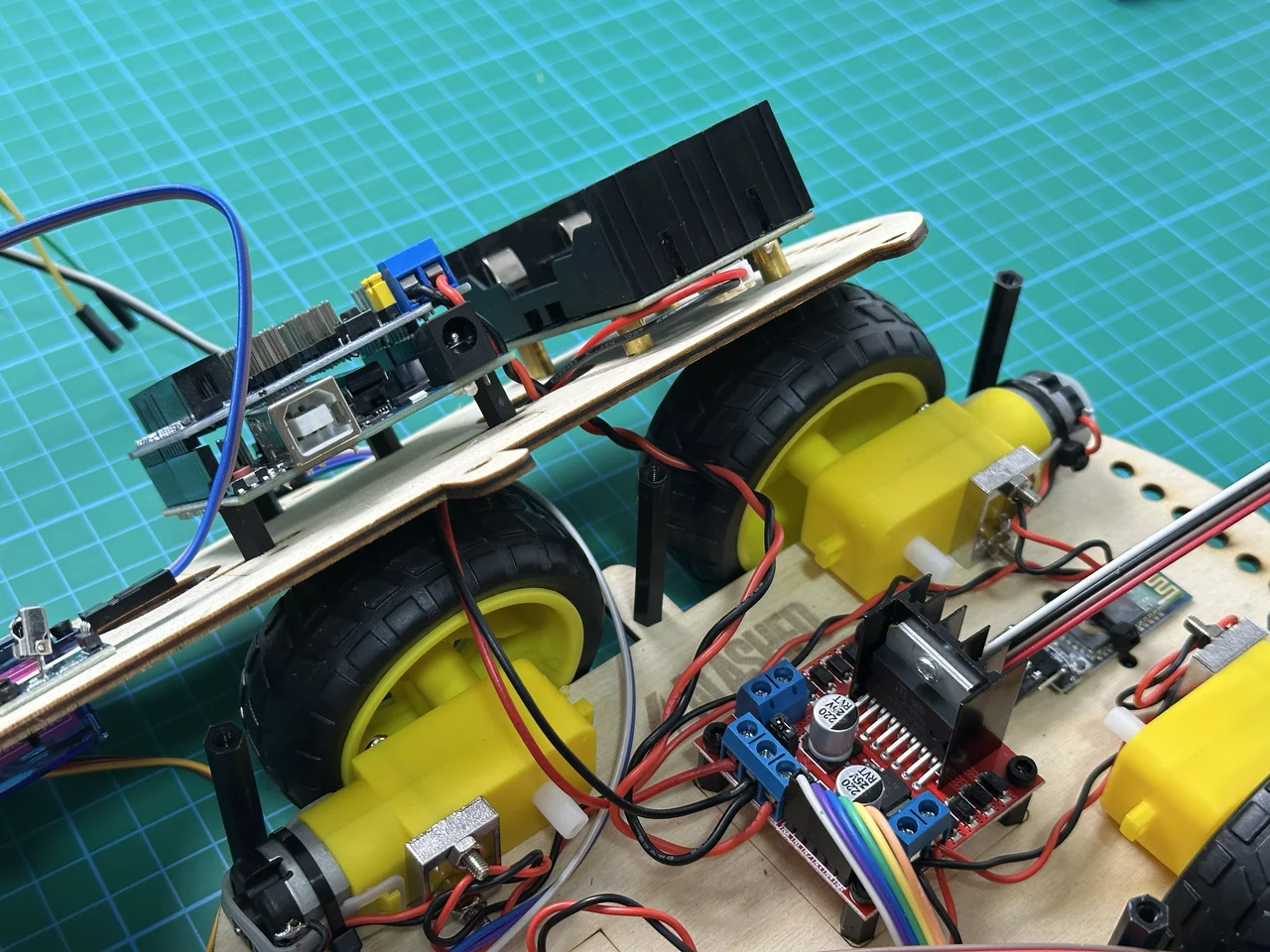
19.3. Два этажа соединены
Шаг 20: Установка аккумуляторов (ТОЛЬКО после проверки!)
Опасно
СТОП! Перед установкой аккумуляторов выполните финальную проверку из Шага 29!
Установка аккумуляторов:
Возьмите 2 аккумулятора Li-ion 18650 (заряженные!)
Соблюдайте полярность: + к +, − к −
Вставьте аккумуляторы в холдер
Предупреждение
Полярность критична! Неправильная полярность может повредить L298N и Arduino!
Убедитесь, что переключатель на холдере в положении OFF (выключено)
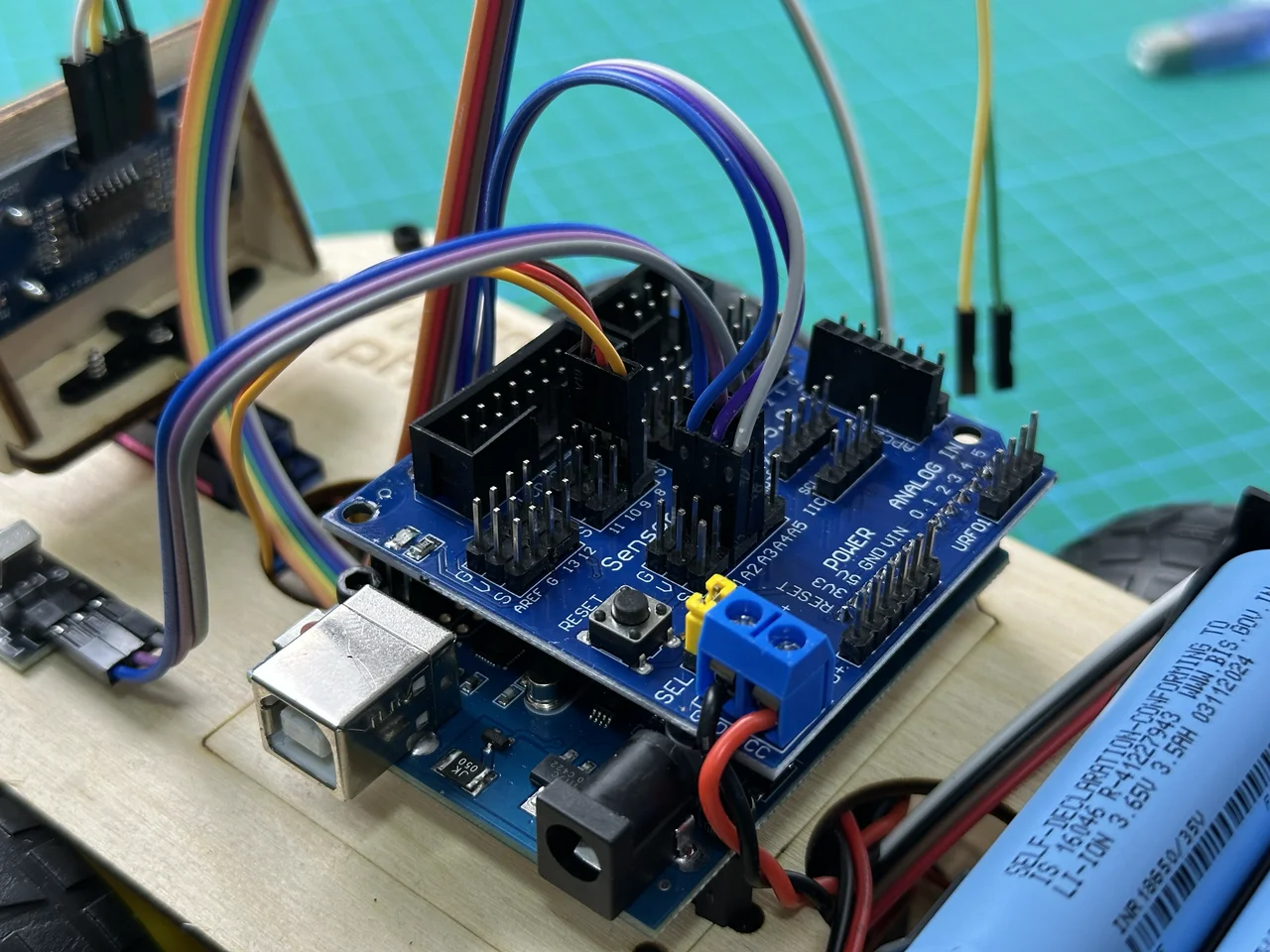
Этап 4: Подключение датчиков к Sensor Shield
Примечание
Важная информация о распиновке Sensor Shield V5:
Каждый разъём на Sensor Shield имеет 3 контакта: G (GND, земля), V (VCC, +5V), S (Signal, сигнальный пин Arduino).
Шаг 21: Подключение сервопривода (PIN 9)
Подключите разъём сервопривода к пину 9 (цифровой D9):
Коричневый/Чёрный → G (GND)
Красный → V (+5V)
Оранжевый/Жёлтый → S (Signal, D9)
Примечание
Почему D9? Pin D9 использует Timer1 Arduino — стандартный таймер для библиотеки Servo.h. D10 НЕ используем для серво (конфликт с Bluetooth и библиотекой Servo).
Шаг 22: Подключение ИК-приёмника (PIN A3)
Подключите ИК-приёмник к пину A3 (аналоговый, используется как цифровой):
Серый (OUT) → S (Signal, A3)
Фиолетовый (VCC) → V (+5V)
Синий (GND) → G (GND)
Примечание
Почему A3? Аналоговый пин A3 используется как цифровой (библиотека IRremote может использовать любой пин). A0-A2 зарезервированы под датчики линии.
Шаг 23: Подключение датчиков линии (PINS A0, A1, A2)
23.1. Подключение правого датчика → A2
Подключите правый датчик линии к пину A2:
Серый (A0) → S (Signal, A2)
Фиолетовый (VCC) → V (+5V)
Синий (GND) → G (GND)
23.2. Подключение центрального датчика → A1
Подключите центральный датчик линии к пину A1:
Оранжевый (A0) → S (Signal, A1)
Красный (VCC) → V (+5V)
Коричневый (GND) → G (GND)
23.3. Подключение левого датчика → A0
Подключите левый датчик линии к пину A0:
Серый (A0) → S (Signal, A0)
Фиолетовый (VCC) → V (+5V)
Синий (GND) → G (GND)
Примечание
Запомните маркировку:
Левый датчик (слева по ходу робота) → A0
Центральный → A1
Правый (справа по ходу робота) → A2
Шаг 24: Подключение HM-10 Bluetooth (PINS D10, D11)
24.1. TX/RX перекрёстное подключение
Опасно
КРИТИЧЕСКИ ВАЖНО: TX и RX подключаются ПЕРЕКРЁСТНО!
HM-10 TXD (передача) → Arduino RX (приём) → D10
HM-10 RXD (приём) ← Arduino TX (передача) ← D11
24.2. Подключение HM-10 TX → D10 (RX)
Подключите HM-10 TXD к пину D10 (SoftwareSerial RX):
Чёрный (TXD) → S (Signal, D10)
Красный (VCC) → V (+5V)
Коричневый (GND) → G (GND)
24.3. Подключение HM-10 RX → D11 (TX)
Подключите HM-10 RXD к пину D11 (SoftwareSerial TX):
Белый (RXD) → S (Signal, D11)
Примечание
Почему D10/D11?
D0/D1 зарезервированы для USB (Serial Monitor, загрузка прошивки)
D10/D11 используются для SoftwareSerial (виртуальный COM-порт)
Это позволяет одновременно отлаживать код (Serial Monitor) и общаться по Bluetooth!
Шаг 25: Подключение ультразвука RCWL-9610A (PINS D3, D7)
Подключите ультразвуковой датчик:
Белый (VCC) → V (+5V) на D3
Жёлтый (Trig) → S (Signal, D3)
Зелёный (Echo) → S (Signal, D7)
Чёрный (GND) → G (GND) на D3
Примечание
Почему D3 и D7?
D3 и D7 — обычные GPIO пины (НЕ PWM для ультразвука!)
Эти пины НЕ конфликтуют с Timer1 (серво) и Timer0 (моторы)
VCC и GND можно взять с любого разъёма (мы взяли с D3 для удобства)
Шаг 26: Подключение L298N управляющих пинов (правые моторы)
26.1. Подключение к Sensor Shield
Подключите управляющие провода от L298N:
Фиолетовый (IN1) → S (Signal, D4)
Синий (IN2) → S (Signal, D2)
Серый (ENA) → S (Signal, D5)
Примечание
Почему эти пины?
D5 (ENA) — PWM на Timer0 (для регулировки скорости 0-100%)
D4, D2 (IN1, IN2) — обычные GPIO для направления
Timer0 безопасен для PWM моторов (не конфликтует с servo/ultrasonic)
Шаг 27: Подключение L298N управляющих пинов (левые моторы)
27.1. Подключение к Sensor Shield
Подключите управляющие провода от L298N:
Зелёный (IN3) → S (Signal, D12)
Жёлтый (IN4) → S (Signal, D8)
Оранжевый (ENB) → S (Signal, D6)
Примечание
Почему эти пины?
D6 (ENB) — PWM на Timer0 (для регулировки скорости 0-100%)
D12, D8 (IN3, IN4) — обычные GPIO для направления
Timer0 безопасен для одновременной работы обоих моторов
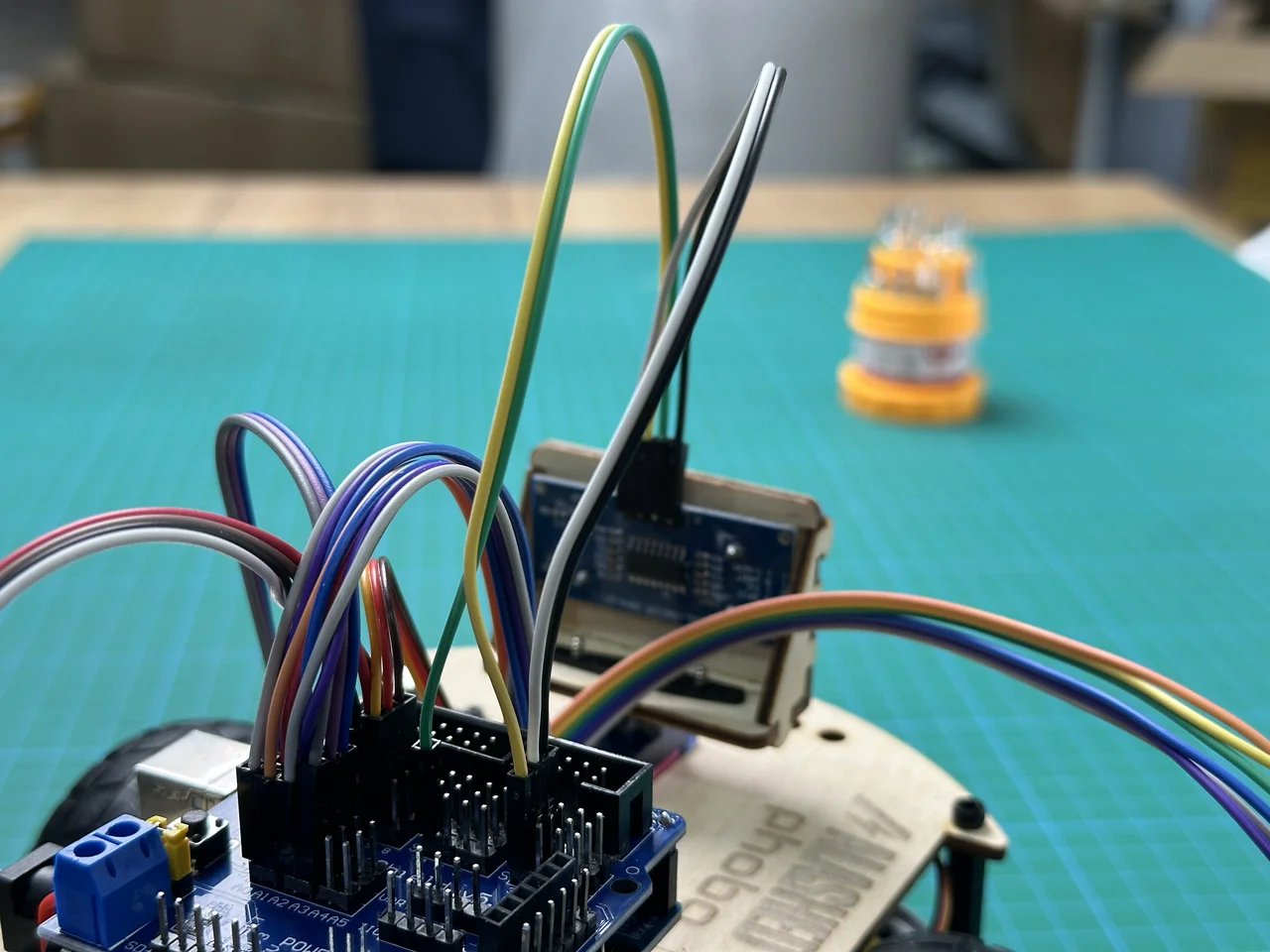
Шаг 28: Организация проводов (cable management)
Используйте 5 пластиковых хомутов (кабельные стяжки) для организации проводов:
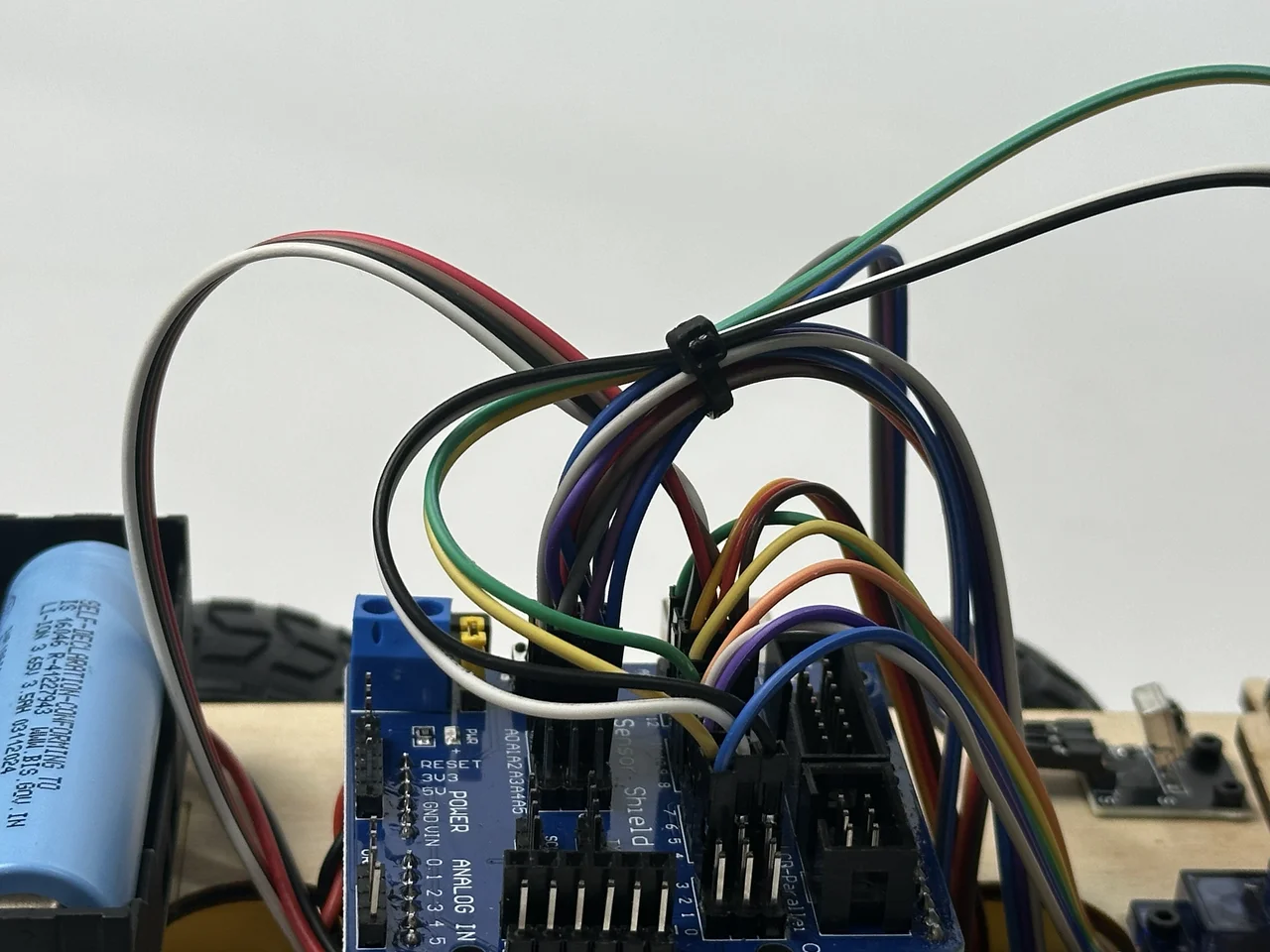
Соберите провода в группы и закрепите хомутами. Провода должны быть аккуратно собраны, не пережаты, и не мешать подвижным частям (колёсам, сервоприводу).
Финальная проверка и первое включение
Опасно
Будьте готовы быстро выключить при проблемах! Держите руку на переключателе.
Последовательность включения:
Переведите переключатель в положение ON (включено)
Наблюдайте:
✅ Светодиод PWR на Arduino загорелся (оранжевый/красный)
✅ Светодиод L на Arduino мигнул (встроенная программа Blink)
✅ Светодиод на L298N загорелся (красный)
✅ Светодиод на HM-10 мигает (модуль ищет соединение)
✅ Нет дыма, запаха, нагрева, искр, странных звуков
Если всё в порядке — оставьте включённым на 10 секунд
Переведите переключатель в положение OFF (выключите питание)
Важно
Если что-то пошло не так:
Немедленно выключите переключатель!
Проверьте полярность батарей
Проверьте провода питания (AWG от L298N к Shield)
Проверьте, нет ли коротких замыканий
Правило безопасности: Всегда выключайте переключатель, когда не работаете с роботом! Это продлит срок службы батарей и защитит электронику.
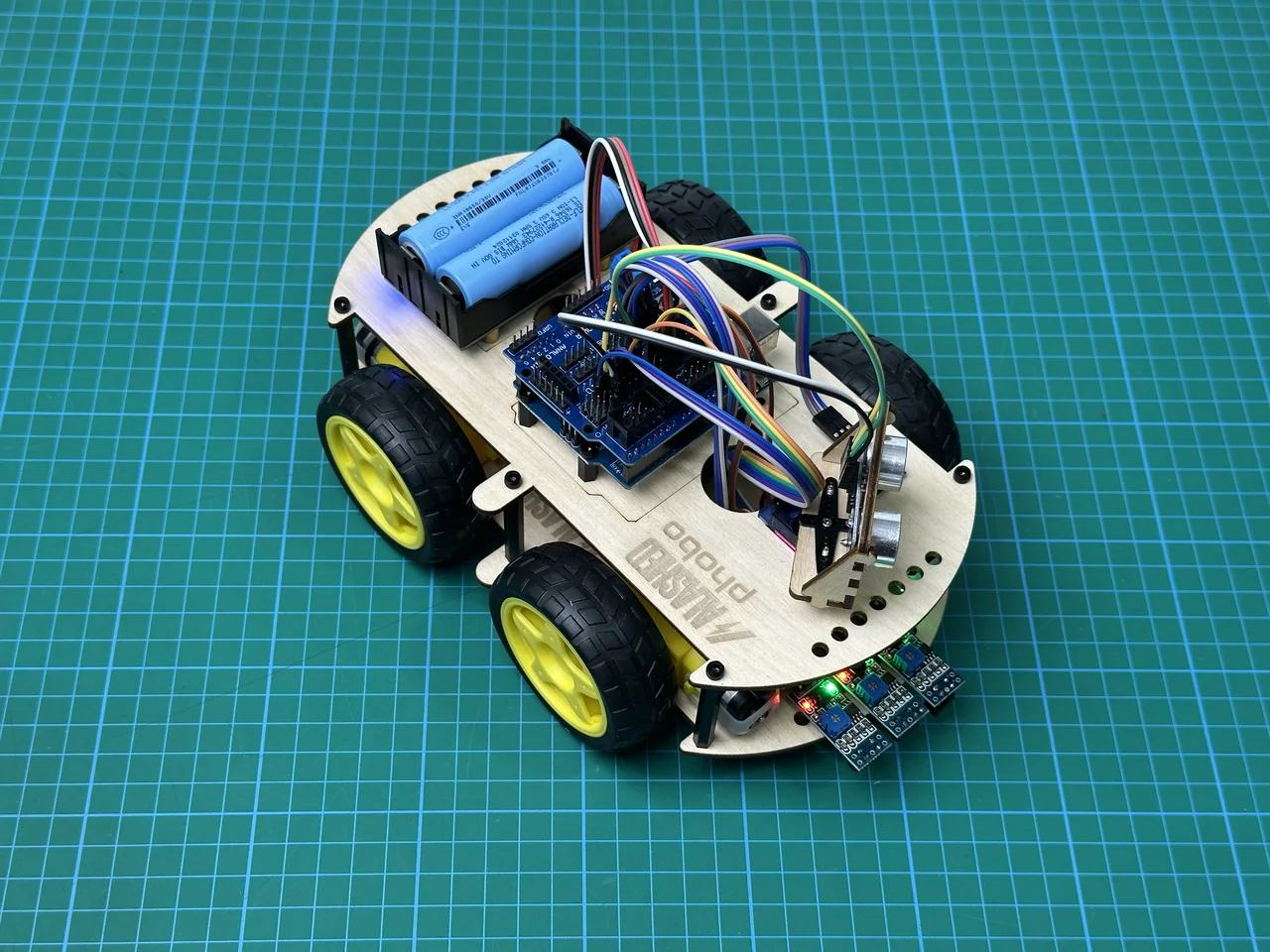
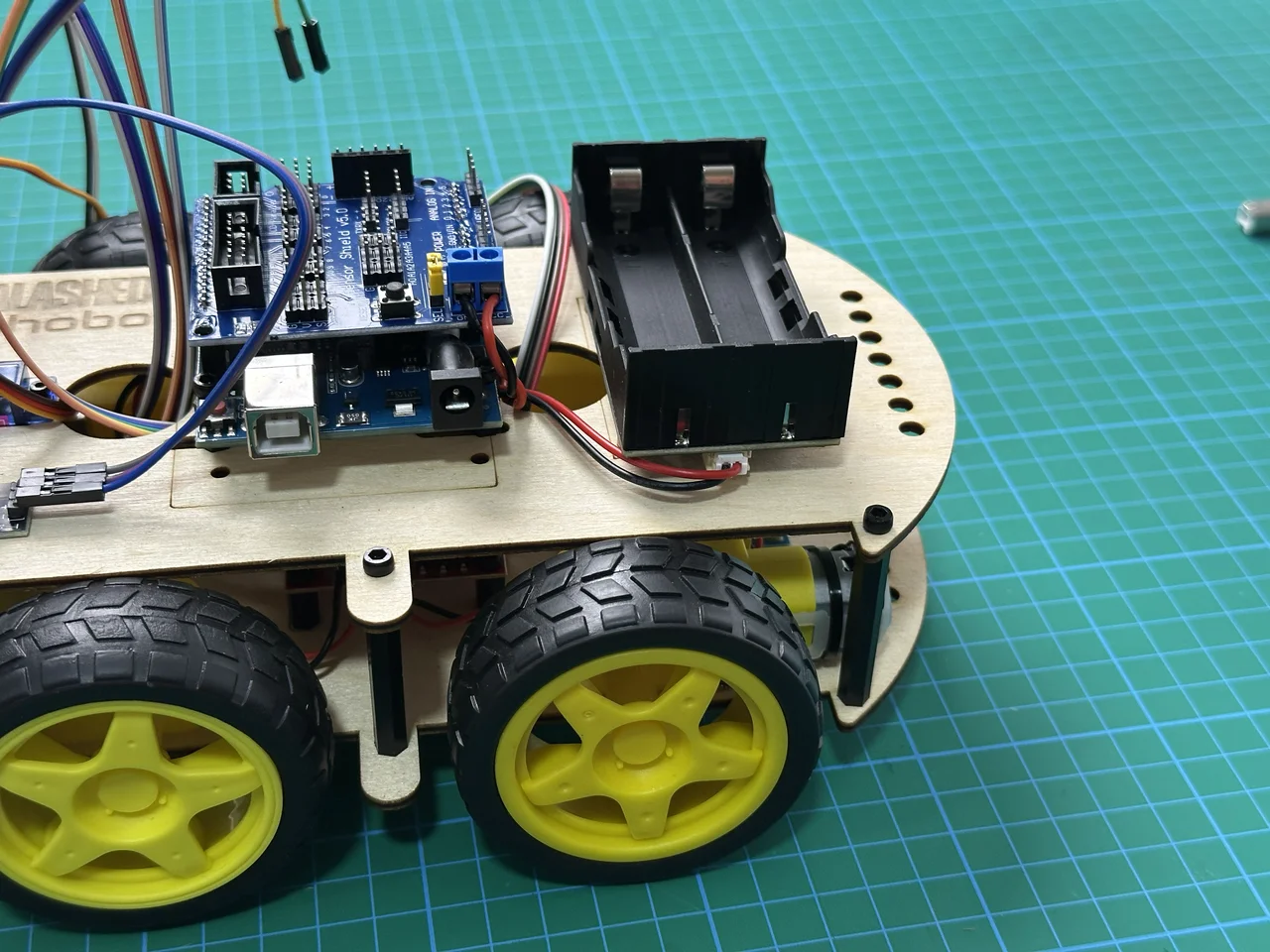
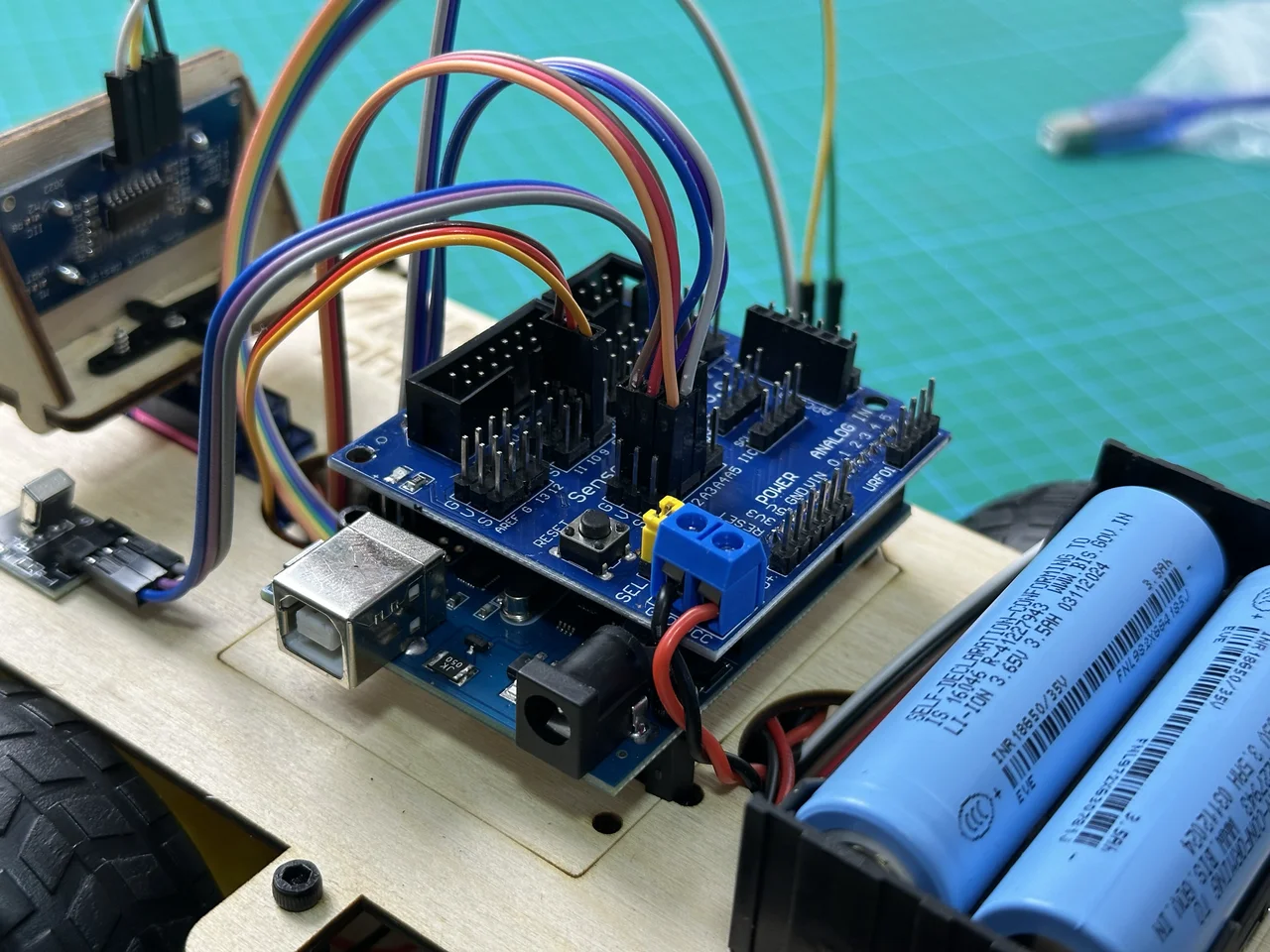
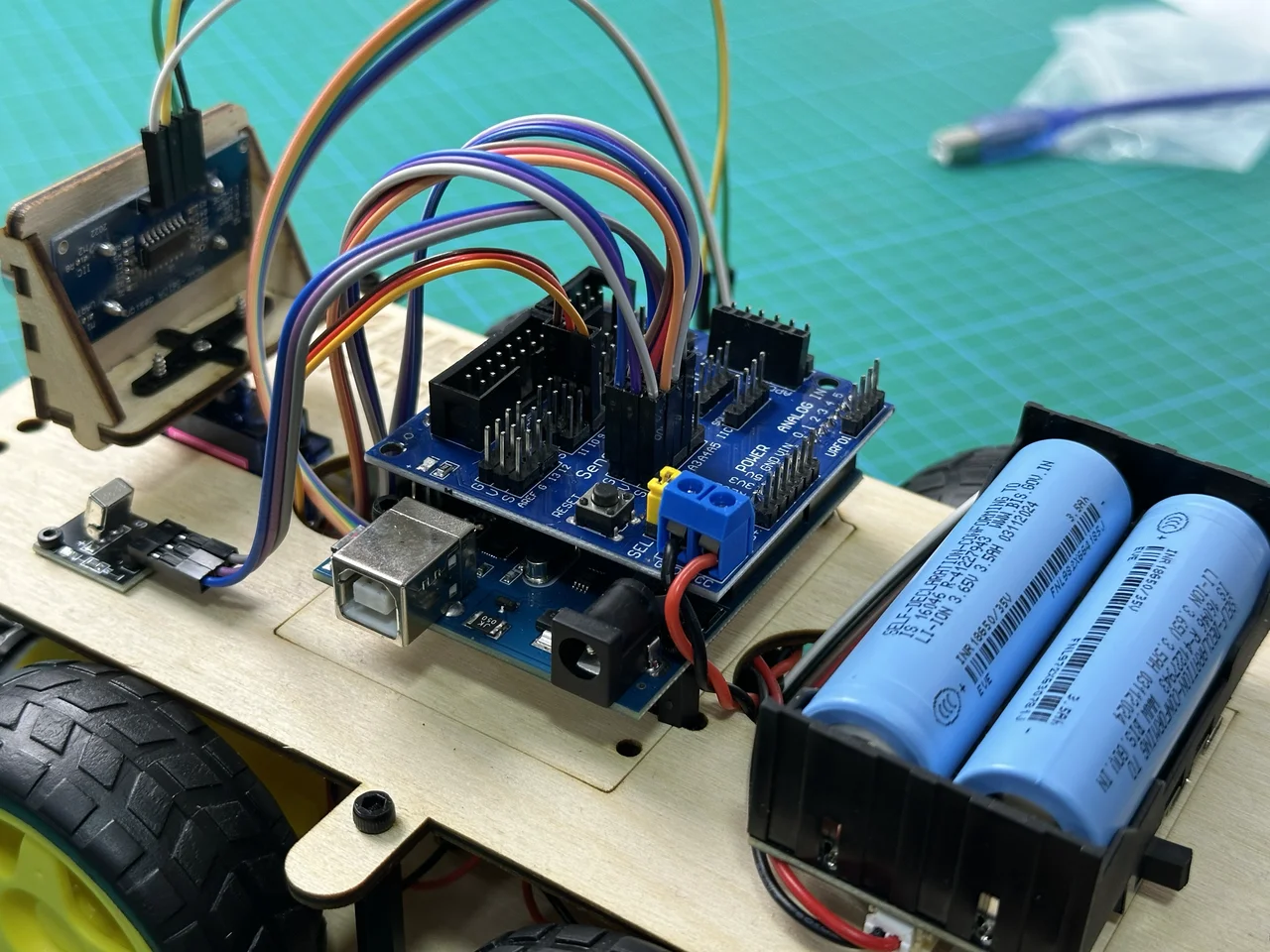
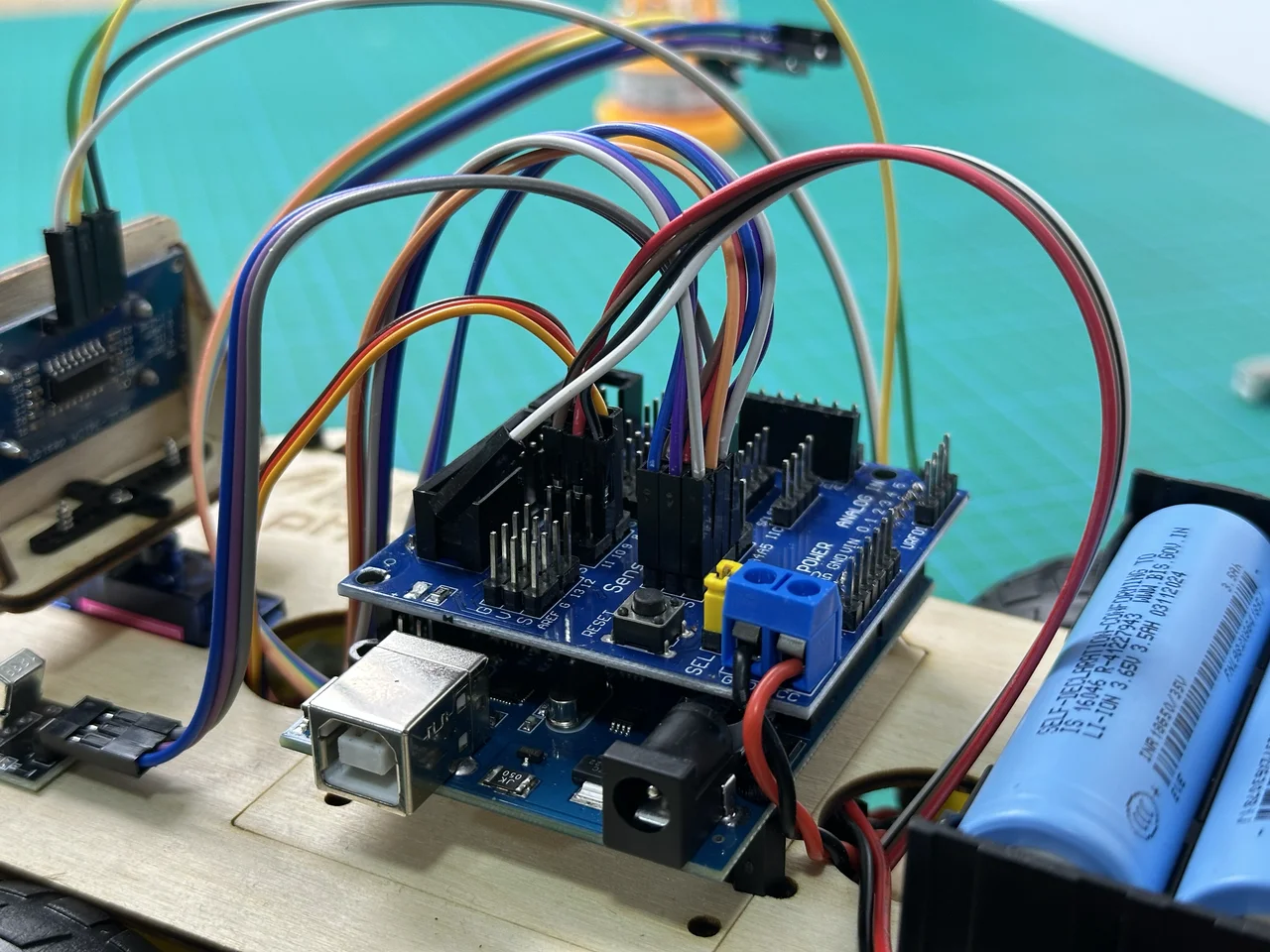
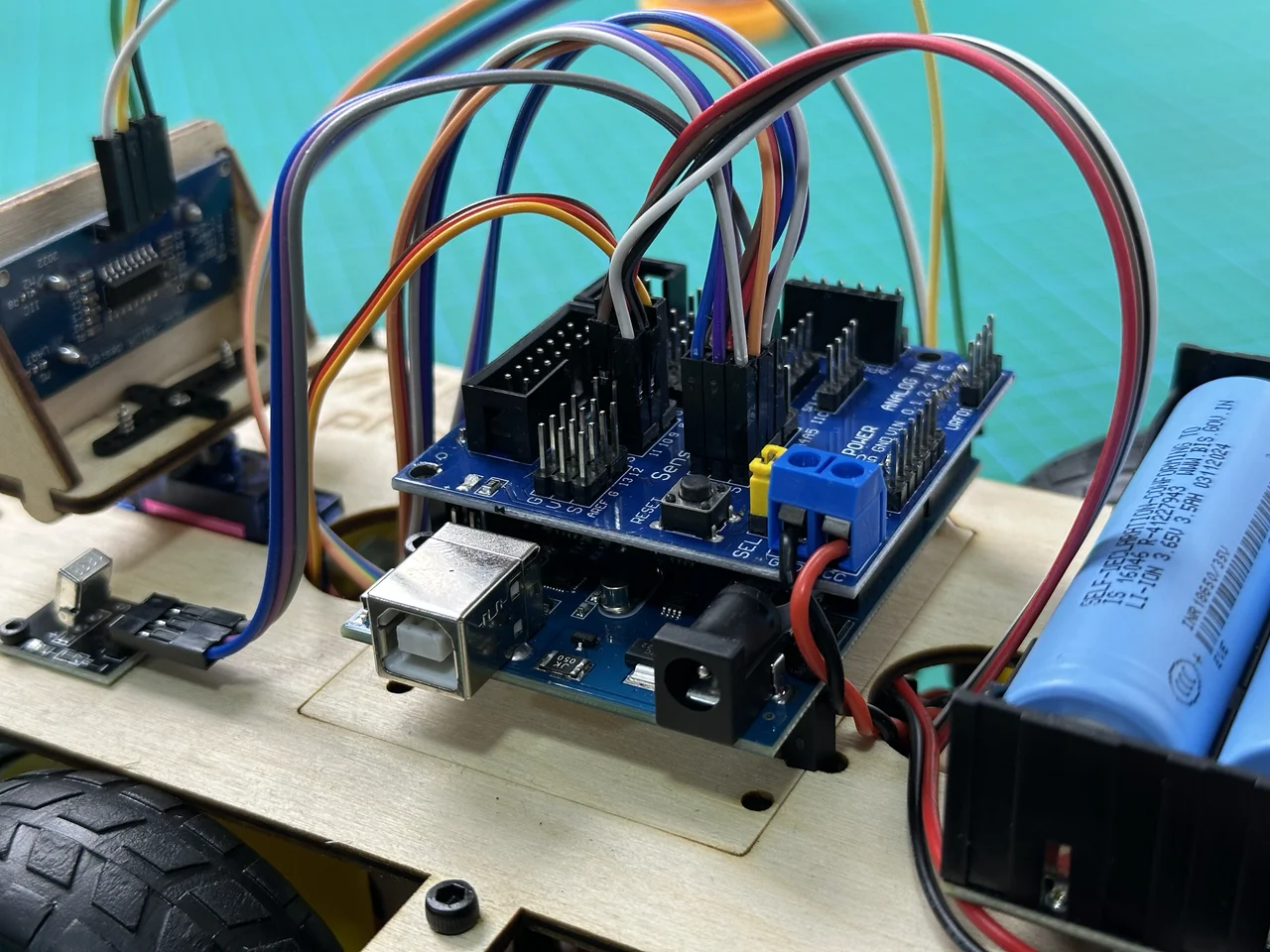
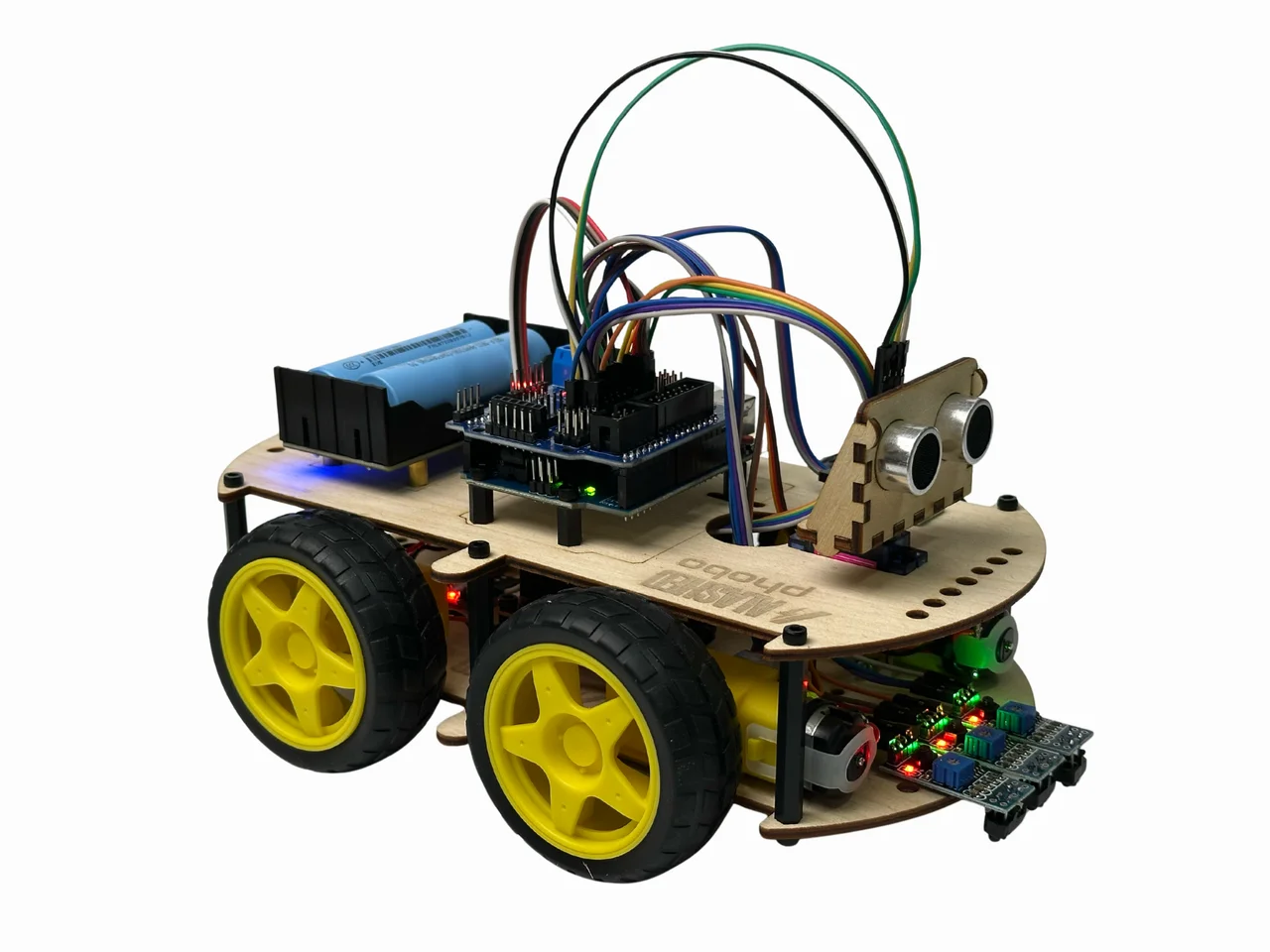
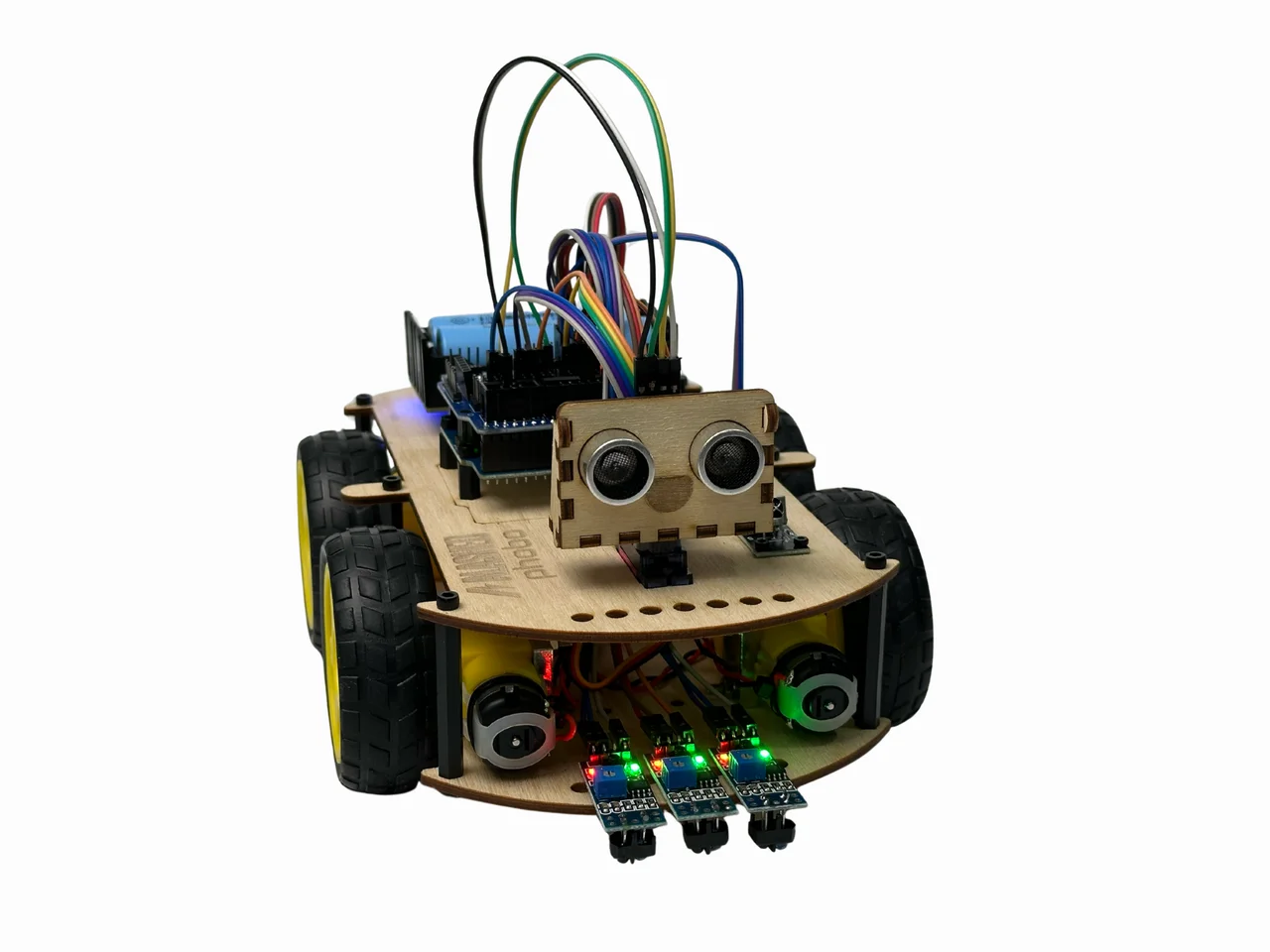
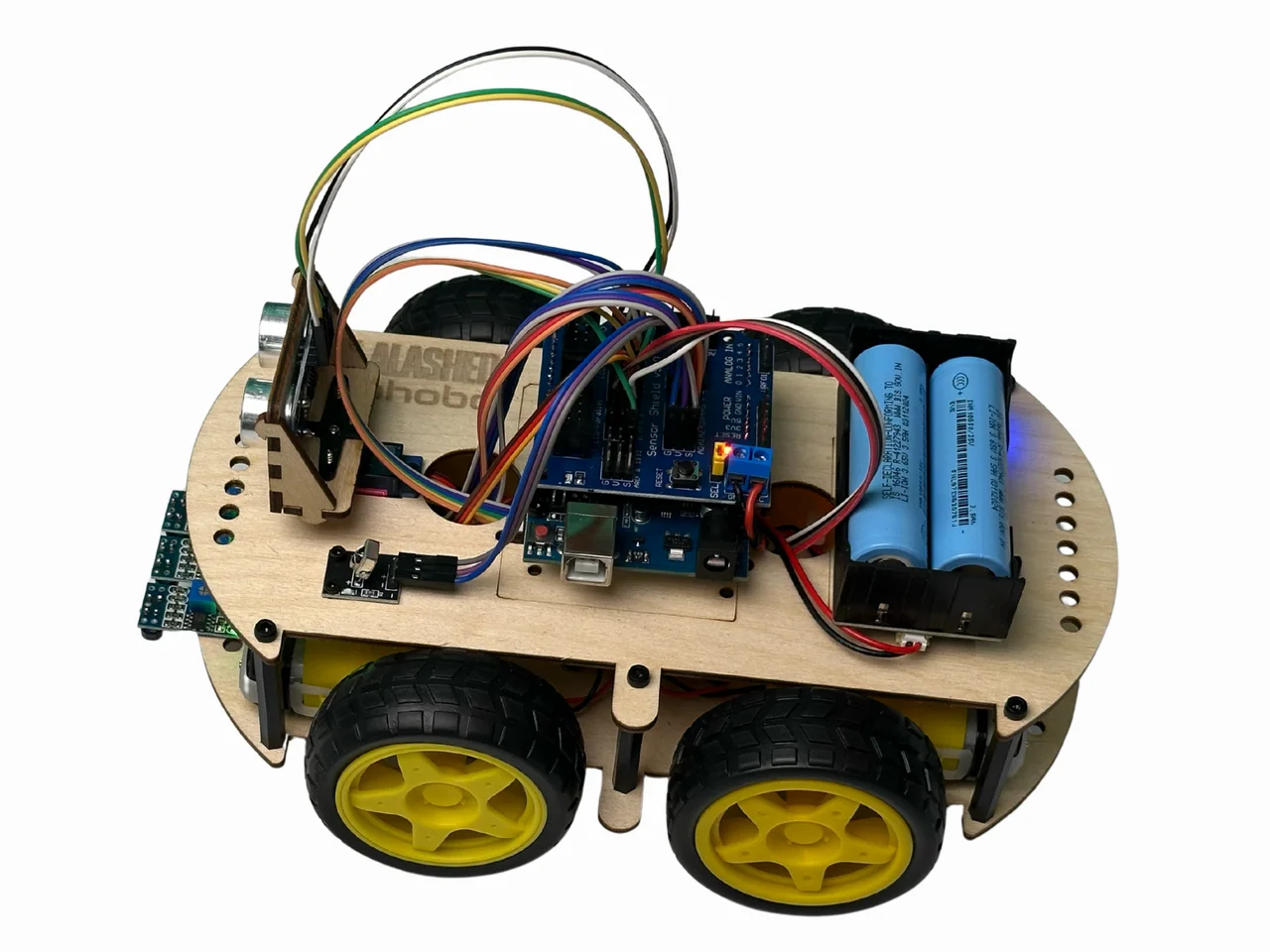
Поздравляем! Робот Фобо собран! 🎉
Галерея готового робота

Сводная таблица распиновки
Для удобства — полная таблица всех подключений:
Arduino Pin |
Компонент |
Назначение |
|---|---|---|
D2 |
L298N IN2 |
Левый мотор направление 2 |
D3 |
RCWL-9610A Trig |
Ультразвук триггер |
D4 |
L298N IN1 |
Левый мотор направление 1 |
D5 |
L298N ENA |
Левый мотор PWM скорость |
D6 |
L298N ENB |
Правый мотор PWM скорость |
D7 |
RCWL-9610A Echo |
Ультразвук эхо |
D8 |
L298N IN4 |
Правый мотор направление 2 |
D9 |
SG92R Servo |
Сервопривод (поворот головы) |
D10 |
HM-10 TXD |
Bluetooth RX (SoftwareSerial) |
D11 |
HM-10 RXD |
Bluetooth TX (SoftwareSerial) |
D12 |
L298N IN3 |
Правый мотор направление 1 |
A0 |
Line Sensor Left |
Левый датчик линии |
A1 |
Line Sensor Center |
Центральный датчик линии |
A2 |
Line Sensor Right |
Правый датчик линии |
A3 |
VS1838B IR |
ИК-приёмник |