Telegram: ESP32-CAM — съёмка и отправка фото (Arduino IDE)
В этом руководстве вы создадите Telegram-бота для взаимодействия с ESP32-CAM, чтобы запрашивать новые фотографии. Вы можете запросить новое фото из своей учётной записи Telegram из любой точки мира. Вам нужен только доступ к интернету на смартфоне.

Примечание
Этот проект совместим с любой платой ESP32 Camera Board с камерой OV2640. Вам просто нужно убедиться, что вы используете правильную распиновку для вашей платы.
Обзор проекта
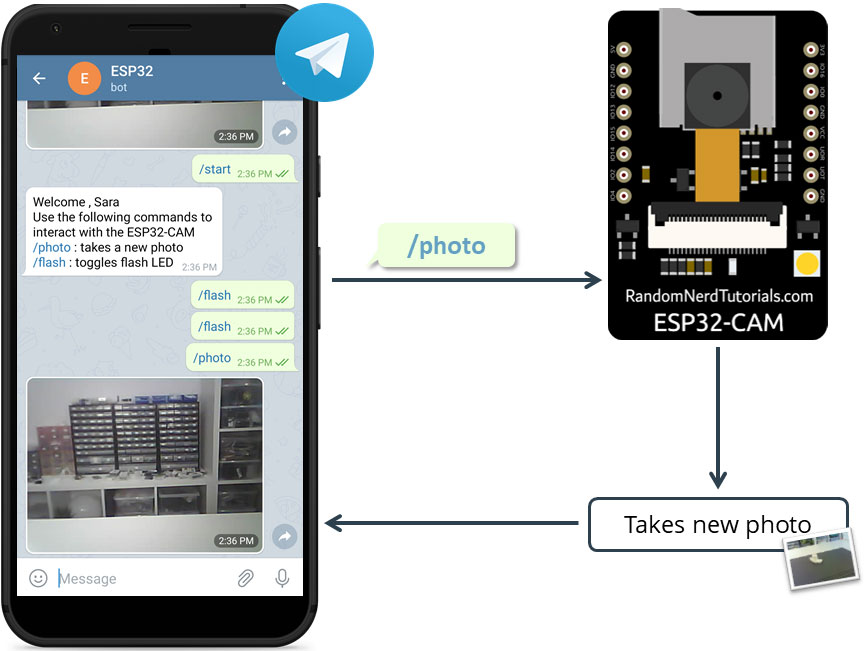
Вот обзор проекта, который вы создадите:
Вы создадите Telegram-бота для вашей ESP32-CAM;
Вы сможете начать разговор с ботом ESP32-CAM;
Когда вы отправляете сообщение /photo боту ESP32-CAM, плата ESP32-CAM получает сообщение, делает новое фото и отправляет его в ответ;
Вы можете отправить сообщение /flash для переключения вспышки ESP32-CAM;
Вы можете отправить сообщение /start, чтобы получить приветственное сообщение с командами для управления платой;
ESP32-CAM будет отвечать только на сообщения, приходящие от вашего Telegram User ID.
Это простой проект, но он показывает, как можно использовать Telegram в ваших IoT-проектах и проектах домашней автоматизации. Идея состоит в том, чтобы применить изученные концепции в ваших собственных проектах.
У нас также есть специальный проект для ESP32-CAM с Telegram, который охватывает более продвинутые функции: управление выходами, запрос показаний датчиков и уведомления о движении.
Знакомство с Telegram
Telegram Messenger — это облачный сервис мгновенного обмена сообщениями и голосовой связи. Вы можете легко установить его на свой смартфон (Android и iPhone) или компьютер (PC, Mac и Linux). Он бесплатный и без рекламы. Telegram позволяет создавать ботов, с которыми можно взаимодействовать.
«Боты — это сторонние приложения, которые работают внутри Telegram. Пользователи могут взаимодействовать с ботами, отправляя им сообщения, команды и встроенные запросы. Вы управляете своими ботами с помощью HTTPS-запросов к Telegram Bot API».
ESP32-CAM будет взаимодействовать с Telegram-ботом для получения и обработки сообщений, а также отправки ответов. В этом руководстве вы узнаете, как использовать Telegram для отправки сообщений вашему боту, чтобы запросить новое фото, сделанное ESP32-CAM. Вы можете получить фото, где бы вы ни находились (вам нужен только Telegram и доступ в интернет).
Создание Telegram-бота
Перейдите в Google Play или App Store, скачайте и установите Telegram.
Откройте Telegram и выполните следующие шаги для создания Telegram-бота. Сначала найдите «botfather» и нажмите на BotFather, как показано ниже. Или откройте эту ссылку t.me/botfather на своём смартфоне.
Должно открыться следующее окно, и вам будет предложено нажать кнопку start.
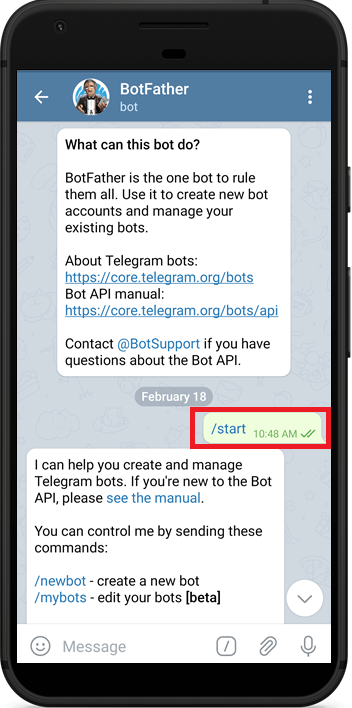
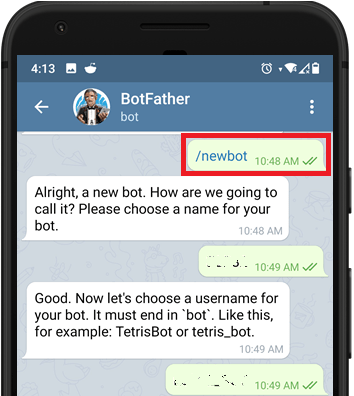
Введите /newbot и следуйте инструкциям для создания вашего бота. Дайте ему имя и username.
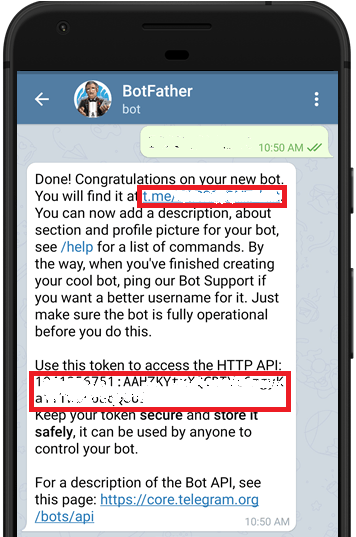
Если ваш бот успешно создан, вы получите сообщение со ссылкой для доступа к боту и токеном бота. Сохраните токен бота, потому что он понадобится вам, чтобы ESP32 мог взаимодействовать с ботом.
Примечание
Токен бота — это очень длинная строка. Чтобы убедиться, что вы скопировали его правильно, перейдите в веб-интерфейс Telegram и скопируйте токен бота оттуда.
Получение Telegram User ID
Любой, кто знает username вашего бота, может с ним взаимодействовать. Чтобы убедиться, что мы игнорируем сообщения не из нашей учётной записи Telegram (или любых авторизованных пользователей), вы можете получить свой Telegram User ID. Тогда, когда ваш Telegram-бот получит сообщение, ESP сможет проверить, соответствует ли ID отправителя вашему User ID, и обработать сообщение или проигнорировать его.
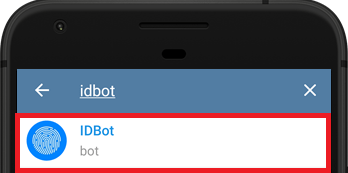
В вашей учётной записи Telegram найдите «IDBot» или откройте эту ссылку t.me/myidbot на своём смартфоне.
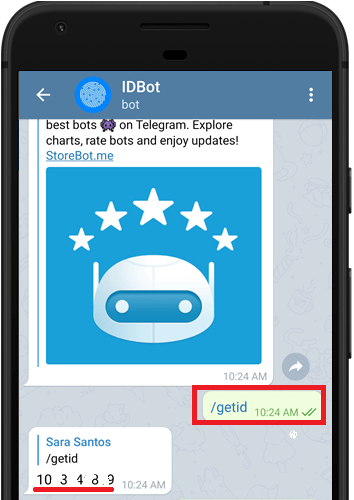
Начните разговор с этим ботом и введите /getid. Вы получите ответ с вашим User ID. Сохраните этот User ID, потому что он понадобится вам далее в этом руководстве.
Подготовка Arduino IDE
Мы будем программировать плату ESP32 с помощью Arduino IDE, поэтому убедитесь, что у вас установлена поддержка ESP32 в Arduino IDE.
Библиотека Universal Telegram Bot
Для взаимодействия с Telegram-ботом мы будем использовать библиотеку Universal Telegram Bot, созданную Brian Lough, которая предоставляет удобный интерфейс для Telegram Bot API.
Выполните следующие шаги для установки последней версии библиотеки:
Нажмите здесь, чтобы скачать библиотеку Universal Arduino Telegram Bot.
Перейдите в Sketch > Include Library > Add .ZIP Library….
Добавьте только что скачанную библиотеку.
Важно
Не устанавливайте библиотеку через Arduino Library Manager, потому что он может установить устаревшую версию.
Для всех подробностей о библиотеке посмотрите страницу Universal Arduino Telegram Bot Library на GitHub.
Библиотека ArduinoJson
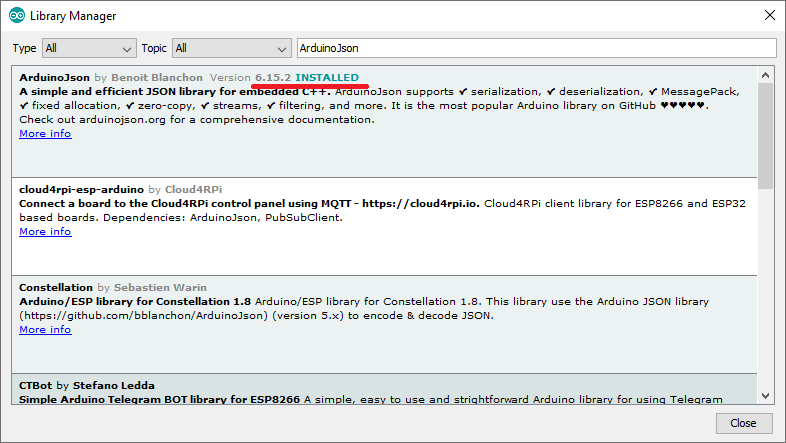
Вам также необходимо установить библиотеку ArduinoJson. Выполните следующие шаги для установки библиотеки:
Перейдите в Sketch > Include Library > Manage Libraries.
Найдите «ArduinoJson».
Установите библиотеку.
Мы используем библиотеку ArduinoJson версии 6.15.2.
Код
Скопируйте следующий код в Arduino IDE. Чтобы этот скетч работал для вас, вам нужно вставить свои сетевые учётные данные (SSID и пароль), токен Telegram-бота и ваш Telegram User ID. Кроме того, проверьте назначение выводов для используемой вами платы камеры.
/*
Rui Santos
Complete project details at https://RandomNerdTutorials.com/telegram-esp32-cam-photo-arduino/
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files.
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
*/
#include <Arduino.h>
#include <WiFi.h>
#include <WiFiClientSecure.h>
#include "soc/soc.h"
#include "soc/rtc_cntl_reg.h"
#include "esp_camera.h"
#include <UniversalTelegramBot.h>
#include <ArduinoJson.h>
const char* ssid = "REPLACE_WITH_YOUR_SSID";
const char* password = "REPLACE_WITH_YOUR_PASSWORD";
// Initialize Telegram BOT
String BOTtoken = "XXXXXXXXXX:XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX"; // your Bot Token (Get from Botfather)
// Use @myidbot to find out the chat ID of an individual or a group
// Also note that you need to click "start" on a bot before it can
// message you
String CHAT_ID = "XXXXXXXXXX";
bool sendPhoto = false;
WiFiClientSecure clientTCP;
UniversalTelegramBot bot(BOTtoken, clientTCP);
#define FLASH_LED_PIN 4
bool flashState = LOW;
//Checks for new messages every 1 second.
int botRequestDelay = 1000;
unsigned long lastTimeBotRan;
//CAMERA_MODEL_AI_THINKER
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
void configInitCamera(){
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sccb_sda = SIOD_GPIO_NUM;
config.pin_sccb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
config.grab_mode = CAMERA_GRAB_LATEST;
//init with high specs to pre-allocate larger buffers
if(psramFound()){
config.frame_size = FRAMESIZE_UXGA;
config.jpeg_quality = 10; //0-63 lower number means higher quality
config.fb_count = 1;
} else {
config.frame_size = FRAMESIZE_SVGA;
config.jpeg_quality = 12; //0-63 lower number means higher quality
config.fb_count = 1;
}
// camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
delay(1000);
ESP.restart();
}
}
void handleNewMessages(int numNewMessages) {
Serial.print("Handle New Messages: ");
Serial.println(numNewMessages);
for (int i = 0; i < numNewMessages; i++) {
String chat_id = String(bot.messages[i].chat_id);
if (chat_id != CHAT_ID){
bot.sendMessage(chat_id, "Unauthorized user", "");
continue;
}
// Print the received message
String text = bot.messages[i].text;
Serial.println(text);
String from_name = bot.messages[i].from_name;
if (text == "/start") {
String welcome = "Welcome , " + from_name + "\n";
welcome += "Use the following commands to interact with the ESP32-CAM \n";
welcome += "/photo : takes a new photo\n";
welcome += "/flash : toggles flash LED \n";
bot.sendMessage(CHAT_ID, welcome, "");
}
if (text == "/flash") {
flashState = !flashState;
digitalWrite(FLASH_LED_PIN, flashState);
Serial.println("Change flash LED state");
}
if (text == "/photo") {
sendPhoto = true;
Serial.println("New photo request");
}
}
}
String sendPhotoTelegram() {
const char* myDomain = "api.telegram.org";
String getAll = "";
String getBody = "";
//Dispose first picture because of bad quality
camera_fb_t * fb = NULL;
fb = esp_camera_fb_get();
esp_camera_fb_return(fb); // dispose the buffered image
// Take a new photo
fb = NULL;
fb = esp_camera_fb_get();
if(!fb) {
Serial.println("Camera capture failed");
delay(1000);
ESP.restart();
return "Camera capture failed";
}
Serial.println("Connect to " + String(myDomain));
if (clientTCP.connect(myDomain, 443)) {
Serial.println("Connection successful");
String head = "--RandomNerdTutorials\r\nContent-Disposition: form-data; name=\"chat_id\"; \r\n\r\n" + CHAT_ID + "\r\n--RandomNerdTutorials\r\nContent-Disposition: form-data; name=\"photo\"; filename=\"esp32-cam.jpg\"\r\nContent-Type: image/jpeg\r\n\r\n";
String tail = "\r\n--RandomNerdTutorials--\r\n";
size_t imageLen = fb->len;
size_t extraLen = head.length() + tail.length();
size_t totalLen = imageLen + extraLen;
clientTCP.println("POST /bot"+BOTtoken+"/sendPhoto HTTP/1.1");
clientTCP.println("Host: " + String(myDomain));
clientTCP.println("Content-Length: " + String(totalLen));
clientTCP.println("Content-Type: multipart/form-data; boundary=RandomNerdTutorials");
clientTCP.println();
clientTCP.print(head);
uint8_t *fbBuf = fb->buf;
size_t fbLen = fb->len;
for (size_t n=0;n<fbLen;n=n+1024) {
if (n+1024<fbLen) {
clientTCP.write(fbBuf, 1024);
fbBuf += 1024;
}
else if (fbLen%1024>0) {
size_t remainder = fbLen%1024;
clientTCP.write(fbBuf, remainder);
}
}
clientTCP.print(tail);
esp_camera_fb_return(fb);
int waitTime = 10000; // timeout 10 seconds
long startTimer = millis();
boolean state = false;
while ((startTimer + waitTime) > millis()){
Serial.print(".");
delay(100);
while (clientTCP.available()) {
char c = clientTCP.read();
if (state==true) getBody += String(c);
if (c == '\n') {
if (getAll.length()==0) state=true;
getAll = "";
}
else if (c != '\r')
getAll += String(c);
startTimer = millis();
}
if (getBody.length()>0) break;
}
clientTCP.stop();
Serial.println(getBody);
}
else {
getBody="Connected to api.telegram.org failed.";
Serial.println("Connected to api.telegram.org failed.");
}
return getBody;
}
void setup(){
WRITE_PERI_REG(RTC_CNTL_BROWN_OUT_REG, 0);
// Init Serial Monitor
Serial.begin(115200);
// Set LED Flash as output
pinMode(FLASH_LED_PIN, OUTPUT);
digitalWrite(FLASH_LED_PIN, flashState);
// Config and init the camera
configInitCamera();
// Connect to Wi-Fi
WiFi.mode(WIFI_STA);
Serial.println();
Serial.print("Connecting to ");
Serial.println(ssid);
WiFi.begin(ssid, password);
clientTCP.setCACert(TELEGRAM_CERTIFICATE_ROOT); // Add root certificate for api.telegram.org
while (WiFi.status() != WL_CONNECTED) {
Serial.print(".");
delay(500);
}
Serial.println();
Serial.print("ESP32-CAM IP Address: ");
Serial.println(WiFi.localIP());
}
void loop() {
if (sendPhoto) {
Serial.println("Preparing photo");
sendPhotoTelegram();
sendPhoto = false;
}
if (millis() > lastTimeBotRan + botRequestDelay) {
int numNewMessages = bot.getUpdates(bot.last_message_received + 1);
while (numNewMessages) {
Serial.println("got response");
handleNewMessages(numNewMessages);
numNewMessages = bot.getUpdates(bot.last_message_received + 1);
}
lastTimeBotRan = millis();
}
}
Как работает код
В этом разделе объясняется, как работает код. Продолжайте чтение, чтобы узнать, как работает код, или перейдите к разделу «Демонстрация».
Импорт библиотек
Начните с импорта необходимых библиотек.
#include <Arduino.h>
#include <WiFi.h>
#include <WiFiClientSecure.h>
#include "soc/soc.h"
#include "soc/rtc_cntl_reg.h"
#include "esp_camera.h"
#include <UniversalTelegramBot.h>
#include <ArduinoJson.h>
Сетевые учётные данные
Вставьте свои сетевые учётные данные в следующие переменные.
const char* ssid = "REPLACE_WITH_YOUR_SSID";
const char* password = "REPLACE_WITH_YOUR_PASSWORD";
Telegram User ID
Вставьте свой Chat ID. Тот, который вы получили от IDBot.
String CHAT_ID = "XXXXXXXXXX";
Токен Telegram-бота
Вставьте токен вашего Telegram-бота, полученный от Botfather, в переменную BOTtoken.
String BOTtoken = "XXXXXXXXXX:XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX";
Булева переменная sendPhoto указывает, пора ли отправить новое фото в вашу учётную запись Telegram. По умолчанию она установлена в false.
bool sendPhoto = false;
Создайте нового WiFi-клиента с WiFiClientSecure.
WiFiClientSecure clientTCP;
Создайте бота с токеном и клиентом, определёнными ранее.
UniversalTelegramBot bot(BOTtoken, clientTCP);
Создайте переменную для хранения пина вспышки (FLASH_LED_PIN). В ESP32-CAM AI Thinker вспышка подключена к GPIO 4. По умолчанию установите её в LOW.
#define FLASH_LED_PIN 4
bool flashState = LOW;
Переменные botRequestDelay и lastTimeBotRan используются для проверки новых сообщений Telegram каждые x секунд. В данном случае код будет проверять новые сообщения каждую секунду (1000 миллисекунд). Вы можете изменить это время задержки в переменной botRequestDelay.
int botRequestDelay = 1000;
unsigned long lastTimeBotRan;
Инициализация ESP32-CAM
Следующие строки назначают пины ESP32-CAM AI-Thinker. Если вы используете другую модель камеры ESP32, не забудьте изменить распиновку.
//CAMERA_MODEL_AI_THINKER
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
Функция configInitCamera() инициализирует камеру ESP32.
void configInitCamera(){
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
config.grab_mode = CAMERA_GRAB_LATEST;
//init with high specs to pre-allocate larger buffers
if(psramFound()){
config.frame_size = FRAMESIZE_UXGA;
config.jpeg_quality = 10; //0-63 lower number means higher quality
config.fb_count = 1;
} else {
config.frame_size = FRAMESIZE_SVGA;
config.jpeg_quality = 12; //0-63 lower number means higher quality
config.fb_count = 1;
}
// camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
delay(1000);
ESP.restart();
}
}
handleNewMessages()
Функция handleNewMessages() обрабатывает действия при поступлении новых сообщений.
void handleNewMessages(int numNewMessages) {
Serial.print("Handle New Messages: ");
Serial.println(numNewMessages);
Она проверяет доступные сообщения:
for (int i = 0; i < numNewMessages; i++) {
Получает Chat ID для конкретного сообщения и сохраняет его в переменной chat_id. Chat ID определяет, кто отправил сообщение.
String chat_id = String(bot.messages[i].chat_id);
Если chat_id отличается от вашего Chat ID (CHAT_ID), это означает, что кто-то (не вы) отправил сообщение вашему боту. В этом случае сообщение игнорируется и ожидается следующее сообщение.
if (chat_id != CHAT_ID){
bot.sendMessage(chat_id, "Unauthorized user", "");
continue;
}
В противном случае это означает, что сообщение отправлено авторизованным пользователем, поэтому мы сохраняем его в переменной text и проверяем его содержимое.
String text = bot.messages[i].text;
Serial.println(text);
Переменная from_name сохраняет имя отправителя.
String from_name = bot.messages[i].from_name;
Если получено сообщение /start, мы отправляем допустимые команды для управления ESP. Это полезно, если вы забыли, какие команды используются для управления вашей платой.
if (text == "/start") {
String welcome = "Welcome , " + from_name + "\n";
welcome += "Use the following commands to interact with the ESP32-CAM \n";
welcome += "/photo : takes a new photo\n";
welcome += "/flash : toggles flash LED \n";
bot.sendMessage(CHAT_ID, welcome, "");
}
Отправка сообщения боту очень проста. Вам нужно использовать метод sendMessage() на объекте bot и передать в качестве аргументов Chat ID получателя, сообщение и режим парсинга.
bool sendMessage(String chat_id, String text, String parse_mode = "");
В нашем примере мы отправляем сообщение на ID, сохранённый в переменной CHAT_ID (который соответствует вашему личному Chat ID), и отправляем сообщение, сохранённое в переменной welcome.
bot.sendMessage(CHAT_ID, welcome, "");
Если получено сообщение /flash, инвертируем переменную flashState и обновляем состояние вспышки. Если она была LOW, устанавливаем HIGH. Если была HIGH, устанавливаем LOW.
if (text == "/flash") {
flashState = !flashState;
digitalWrite(FLASH_LED_PIN, flashState);
Serial.println("Change flash LED state");
}
Наконец, если получено сообщение /photo, устанавливаем переменную sendPhoto в true. Затем в loop() проверяется значение переменной sendPhoto и выполняются соответствующие действия.
if (text == "/photo") {
sendPhoto = true;
Serial.println("New photo request");
}
sendPhotoTelegram()
Функция sendPhotoTelegram() делает фото с ESP32-CAM.
Примечание
Часто первое фото, сделанное ESP32-CAM, получается некачественным, потому что датчик ещё не настроил баланс белого. Поэтому, чтобы получить хорошее фото, мы отбрасываем первое.
//Dispose first picture because of bad quality
camera_fb_t * fb = NULL;
fb = esp_camera_fb_get();
esp_camera_fb_return(fb); // dispose the buffered image
// Take a new photo
fb = NULL;
fb = esp_camera_fb_get();
if(!fb) {
Serial.println("Camera capture failed");
delay(1000);
ESP.restart();
return "Camera capture failed";
}
Затем выполняется HTTP POST-запрос для отправки фото вашему Telegram-боту.
clientTCP.println("POST /bot"+BOTtoken+"/sendPhoto HTTP/1.1");
clientTCP.println("Host: " + String(myDomain));
clientTCP.println("Content-Length: " + String(totalLen));
clientTCP.println("Content-Type: multipart/form-data; boundary=RandomNerdTutorials");
clientTCP.println();
clientTCP.print(head);
setup()
В setup() инициализируем Serial Monitor.
Serial.begin(115200);
Устанавливаем вспышку как выход и задаём начальное состояние.
pinMode(FLASH_LED_PIN, OUTPUT);
digitalWrite(FLASH_LED_PIN, flashState);
Вызываем функцию configInitCamera() для настройки и инициализации камеры.
configInitCamera();
Подключаем ESP32-CAM к локальной сети.
WiFi.mode(WIFI_STA);
Serial.println();
Serial.print("Connecting to ");
Serial.println(ssid);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
Serial.print(".");
delay(500);
}
loop()
В loop() проверяется состояние переменной sendPhoto. Если она равна true, вызывается функция sendPhotoTelegram() для съёмки и отправки фото в вашу учётную запись Telegram.
if (sendPhoto) {
Serial.println("Preparing photo");
sendPhotoTelegram();
Когда фото отправлено, переменная sendPhoto устанавливается в false.
sendPhoto = false;
В loop() также проверяются новые сообщения каждую секунду.
if (millis() > lastTimeBotRan + botRequestDelay) {
int numNewMessages = bot.getUpdates(bot.last_message_received + 1);
while (numNewMessages) {
Serial.println("got response");
handleNewMessages(numNewMessages);
numNewMessages = bot.getUpdates(bot.last_message_received + 1);
}
lastTimeBotRan = millis();
}
Когда поступает новое сообщение, вызывается функция handleNewMessages().
while (numNewMessages) {
Serial.println("got response");
handleNewMessages(numNewMessages);
numNewMessages = bot.getUpdates(bot.last_message_received + 1);
}
Вот, в общем-то, и всё, как работает код.
Демонстрация
Загрузите код на плату ESP32-CAM. Не забудьте перейти в Tools > Board и выбрать вашу плату. Перейдите в Tools > Port и выберите COM-порт, к которому подключена ваша плата.
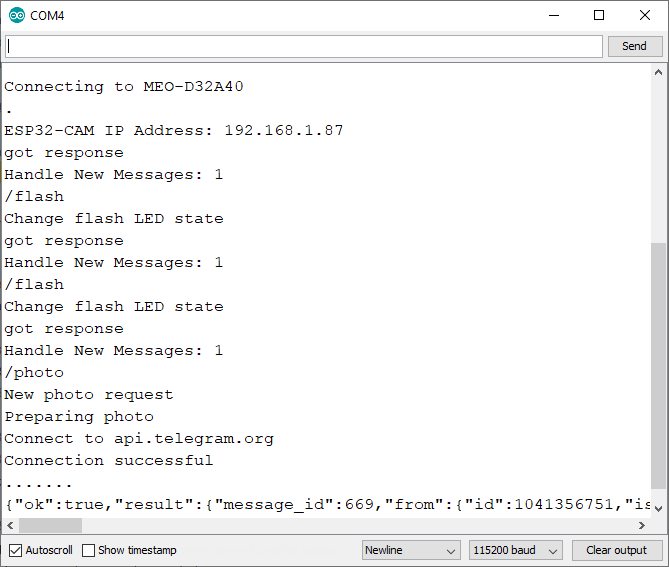
После загрузки кода нажмите кнопку RST на плате ESP32-CAM, чтобы запустить выполнение кода. Затем вы можете открыть Serial Monitor, чтобы видеть, что происходит в фоновом режиме.
Перейдите в свою учётную запись Telegram и откройте разговор с вашим ботом. Отправьте следующие команды и посмотрите, как бот отвечает:
/start показывает приветственное сообщение с допустимыми командами;
/flash переключает состояние вспышки;
/photo делает новое фото и отправляет его в вашу учётную запись Telegram.

Одновременно в Serial Monitor вы должны увидеть, что ESP32-CAM получает сообщения.
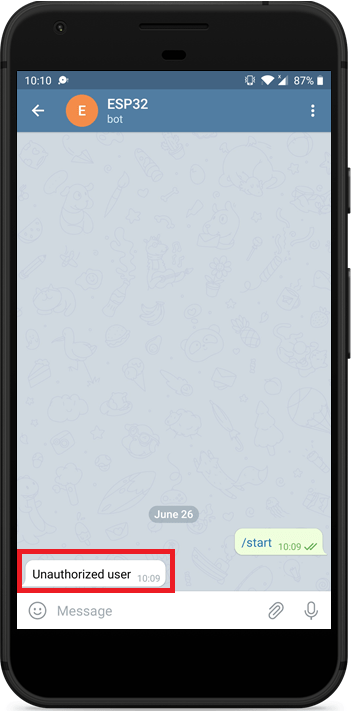
Если вы попытаетесь взаимодействовать с ботом из другой учётной записи, вы получите сообщение «Unauthorized user».
Заключение
В этом руководстве вы узнали, как отправить фото с ESP32-CAM в вашу учётную запись Telegram. Если у вас есть доступ к интернету на смартфоне, вы можете запросить новое фото, где бы вы ни находились. Это отлично подходит для мониторинга вашей ESP32-CAM из любой точки мира.
У нас есть другие руководства по использованию Telegram, которые могут вас заинтересовать: