ESP8266 NodeMCU с MPU-6050: акселерометр, гироскоп и датчик температуры (Arduino)
В этом руководстве вы узнаете, как использовать модуль акселерометра и гироскопа MPU-6050 с ESP8266 NodeMCU. MPU-6050 IMU (Inertial Measurement Unit — инерциальный измерительный модуль) представляет собой 3-осевой акселерометр и 3-осевой гироскоп. Акселерометр измеряет гравитационное ускорение, а гироскоп — угловую скорость вращения. Кроме того, этот модуль также измеряет температуру. Этот датчик идеально подходит для определения ориентации движущегося объекта.
У нас есть аналогичное руководство для ESP32: ESP32 с MPU-6050: акселерометр, гироскоп и датчик температуры (Arduino).
В этом руководстве мы рассмотрим два примера:
Получение показаний гироскопа, акселерометра и температуры (Serial Monitor)
Отображение показаний гироскопа и акселерометра на OLED-дисплее
Знакомство с датчиком MPU-6050 — гироскоп и акселерометр
MPU-6050 — это модуль с 3-осевым акселерометром и 3-осевым гироскопом.
Гироскоп измеряет угловую скорость вращения (рад/с) — это изменение углового положения во времени по осям X, Y и Z (крен, тангаж и рыскание). Это позволяет нам определять ориентацию объекта.
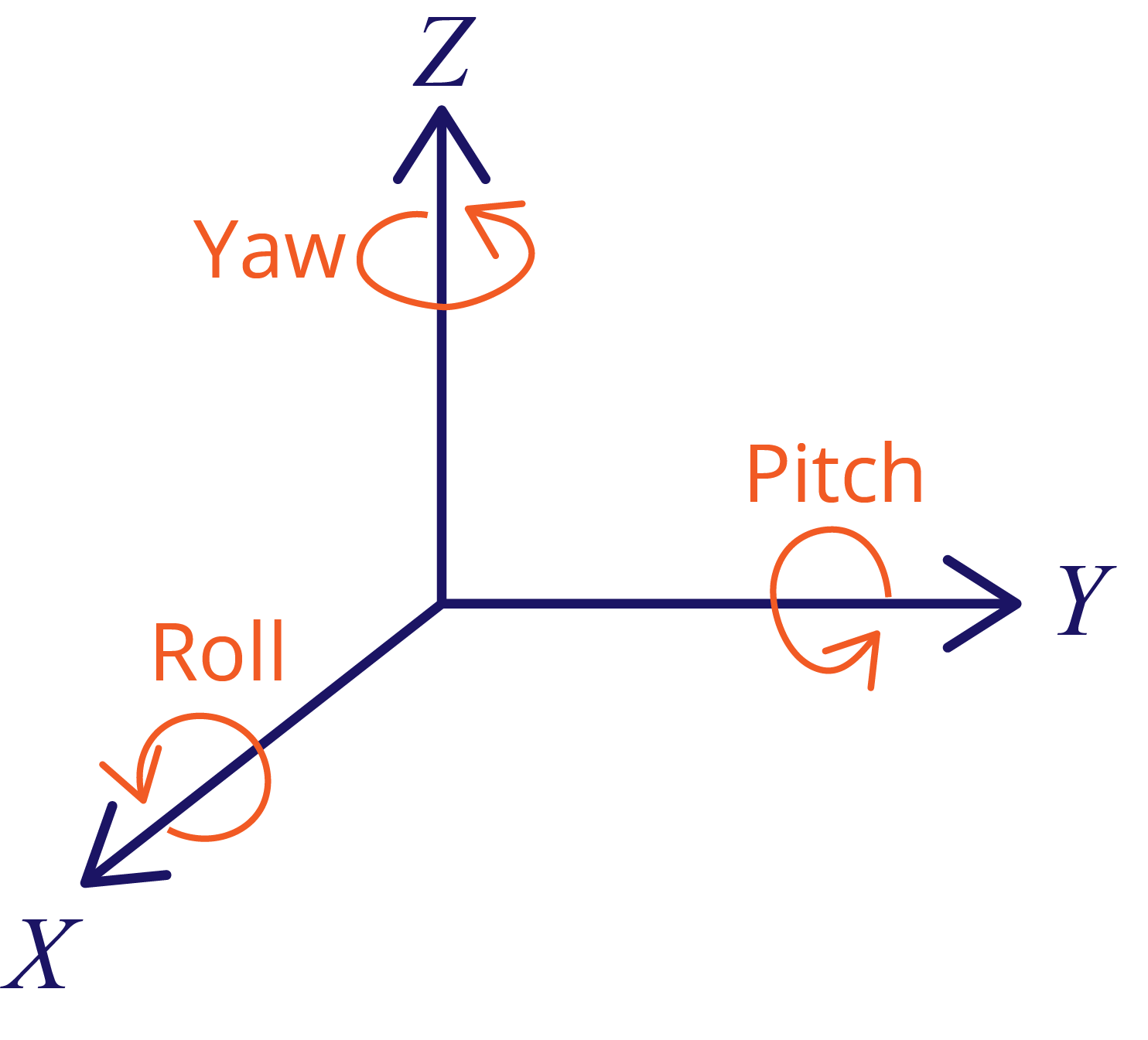
Акселерометр измеряет ускорение (скорость изменения скорости объекта). Он улавливает статические силы, такие как гравитация (9,8 м/с²), а также динамические силы, такие как вибрации или движение. MPU-6050 измеряет ускорение по осям X, Y и Z. В идеале, у неподвижного объекта ускорение по оси Z равно гравитационному ускорению, а по осям X и Y оно должно быть равно нулю.
Используя значения акселерометра, можно рассчитать углы крена (roll) и тангажа (pitch) с помощью тригонометрии. Однако рассчитать угол рыскания (yaw) невозможно.
Мы можем объединить информацию от обоих датчиков, чтобы получить более точную информацию об ориентации сенсора.
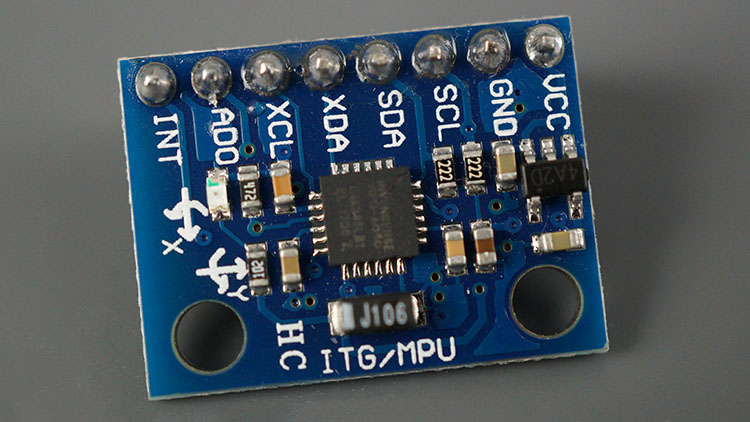
Распиновка MPU-6050
Вот распиновка модуля датчика MPU-6050.
Вывод |
Описание |
|---|---|
VCC |
Питание датчика (3,3 В или 5 В) |
GND |
Общий GND |
SCL |
Вывод SCL для связи по I2C (GPIO 5) |
SDA |
Вывод SDA для связи по I2C (GPIO 4) |
XDA |
Используется для подключения других I2C-датчиков к MPU-6050 |
XCL |
Используется для подключения других I2C-датчиков к MPU-6050 |
AD0 |
Используйте этот вывод для изменения I2C-адреса |
INT |
Вывод прерывания — может использоваться для индикации доступности новых данных измерений |
Подготовка Arduino IDE
Мы будем программировать плату ESP8266 NodeMCU с помощью Arduino IDE. Поэтому убедитесь, что у вас установлено дополнение ESP8266. Следуйте следующему руководству:
Если вы предпочитаете использовать VS Code + PlatformIO IDE, следуйте следующему руководству:
Установка библиотек
Существуют различные способы получения показаний датчика. В этом руководстве мы будем использовать библиотеку Adafruit MPU6050. Для использования этой библиотеки также необходимо установить библиотеку Adafruit Unified Sensor и библиотеку Adafruit Bus IO.
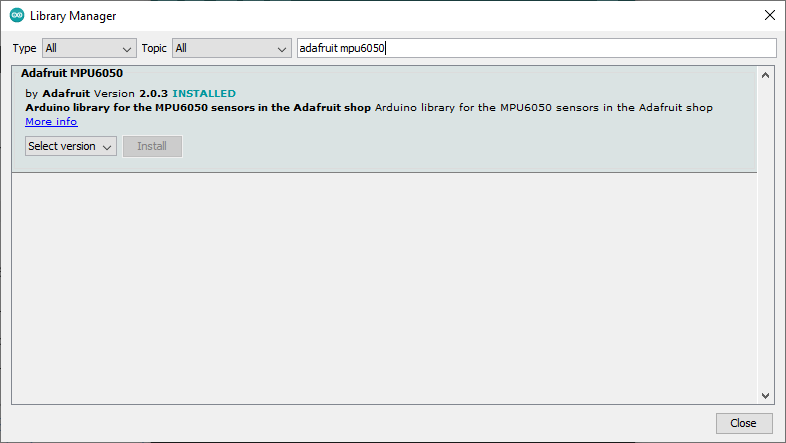
Откройте Arduino IDE и перейдите в Sketch > Include Library > Manage Libraries. Должен открыться Менеджер библиотек.
Введите «adafruit mpu6050» в поле поиска и установите библиотеку.
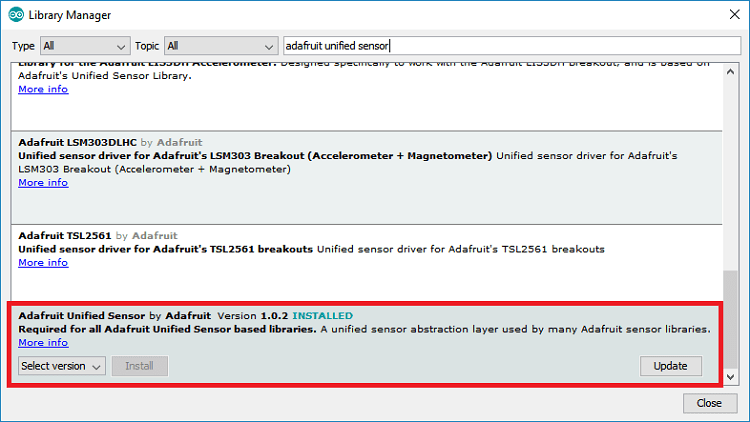
Затем найдите «Adafruit Unified Sensor». Прокрутите вниз, чтобы найти библиотеку, и установите её.
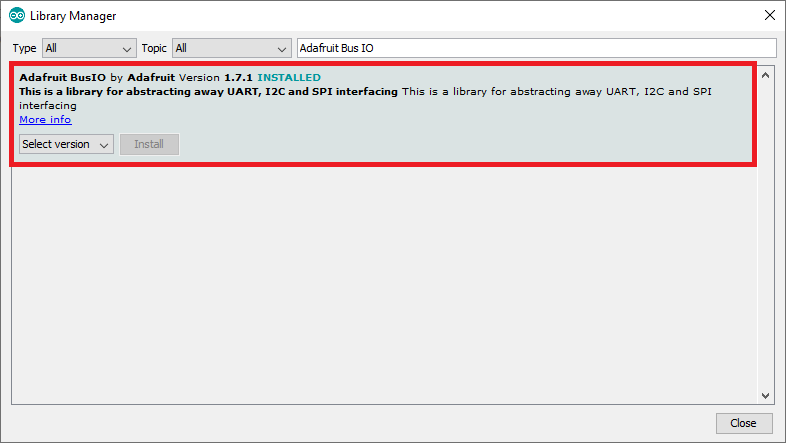
Наконец, найдите «Adafruit Bus IO» и установите её.
После установки библиотек перезапустите Arduino IDE.
Если вы используете VS Code с PlatformIO, скопируйте следующие строки в файл platformio.ini.
lib_deps = adafruit/Adafruit MPU6050 @ ^2.0.3
adafruit/Adafruit Unified Sensor @ ^1.1.4
Получение показаний гироскопа, акселерометра и температуры (Serial Monitor)
В этом разделе вы узнаете, как получать показания датчика MPU-6050: ускорение (x, y, z), угловую скорость (x, y, z) и температуру.
Необходимые компоненты
Для этого примера вам понадобятся следующие компоненты:
ESP8266 (читайте Лучшие платы разработки ESP8266)
Вы можете воспользоваться приведёнными выше ссылками или перейти непосредственно на MakerAdvisor.com/tools, чтобы найти все компоненты для ваших проектов по лучшей цене!
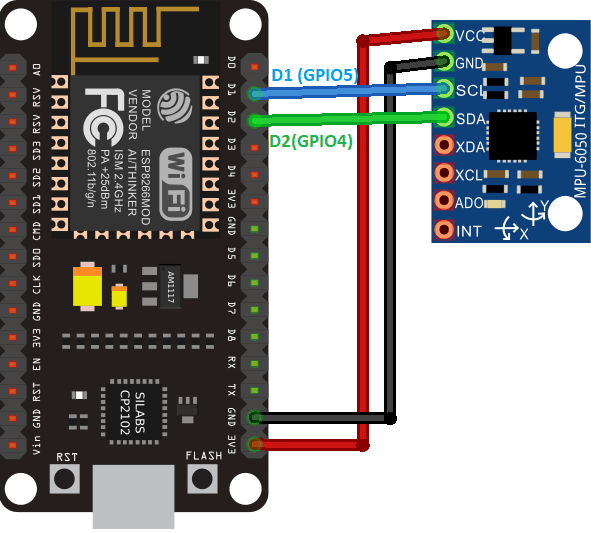
Схема подключения — ESP8266 NodeMCU с MPU-6050
Подключите ESP8266 к датчику MPU-6050, как показано на следующей схеме: подключите вывод SCL к GPIO 5, а вывод SDA к GPIO 4.
Код — получение показаний датчика MPU-6050: акселерометр, гироскоп и температура
Библиотека Adafruit предоставляет несколько примеров для этого датчика. В этом разделе мы рассмотрим базовый пример, который выводит показания датчика в Serial Monitor.
Перейдите в File > Examples > Adafruit MPU6050 > basic_readings. Должен загрузиться следующий код.
Он получает угловую скорость (гироскоп) по осям x, y и z, ускорение по осям x, y и z, а также температуру.
// Basic demo for accelerometer readings from Adafruit MPU6050
// ESP32 Guide: https://RandomNerdTutorials.com/esp32-mpu-6050-accelerometer-gyroscope-arduino/
// ESP8266 Guide: https://RandomNerdTutorials.com/esp8266-nodemcu-mpu-6050-accelerometer-gyroscope-arduino/
// Arduino Guide: https://RandomNerdTutorials.com/arduino-mpu-6050-accelerometer-gyroscope/
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
#include <Wire.h>
Adafruit_MPU6050 mpu;
void setup(void) {
Serial.begin(115200);
while (!Serial)
delay(10); // will pause Zero, Leonardo, etc until serial console opens
Serial.println("Adafruit MPU6050 test!");
// Try to initialize!
if (!mpu.begin()) {
Serial.println("Failed to find MPU6050 chip");
while (1) {
delay(10);
}
}
Serial.println("MPU6050 Found!");
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
Serial.print("Accelerometer range set to: ");
switch (mpu.getAccelerometerRange()) {
case MPU6050_RANGE_2_G:
Serial.println("+-2G");
break;
case MPU6050_RANGE_4_G:
Serial.println("+-4G");
break;
case MPU6050_RANGE_8_G:
Serial.println("+-8G");
break;
case MPU6050_RANGE_16_G:
Serial.println("+-16G");
break;
}
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
Serial.print("Gyro range set to: ");
switch (mpu.getGyroRange()) {
case MPU6050_RANGE_250_DEG:
Serial.println("+- 250 deg/s");
break;
case MPU6050_RANGE_500_DEG:
Serial.println("+- 500 deg/s");
break;
case MPU6050_RANGE_1000_DEG:
Serial.println("+- 1000 deg/s");
break;
case MPU6050_RANGE_2000_DEG:
Serial.println("+- 2000 deg/s");
break;
}
mpu.setFilterBandwidth(MPU6050_BAND_5_HZ);
Serial.print("Filter bandwidth set to: ");
switch (mpu.getFilterBandwidth()) {
case MPU6050_BAND_260_HZ:
Serial.println("260 Hz");
break;
case MPU6050_BAND_184_HZ:
Serial.println("184 Hz");
break;
case MPU6050_BAND_94_HZ:
Serial.println("94 Hz");
break;
case MPU6050_BAND_44_HZ:
Serial.println("44 Hz");
break;
case MPU6050_BAND_21_HZ:
Serial.println("21 Hz");
break;
case MPU6050_BAND_10_HZ:
Serial.println("10 Hz");
break;
case MPU6050_BAND_5_HZ:
Serial.println("5 Hz");
break;
}
Serial.println("");
delay(100);
}
void loop() {
/* Get new sensor events with the readings */
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
/* Print out the values */
Serial.print("Acceleration X: ");
Serial.print(a.acceleration.x);
Serial.print(", Y: ");
Serial.print(a.acceleration.y);
Serial.print(", Z: ");
Serial.print(a.acceleration.z);
Serial.println(" m/s^2");
Serial.print("Rotation X: ");
Serial.print(g.gyro.x);
Serial.print(", Y: ");
Serial.print(g.gyro.y);
Serial.print(", Z: ");
Serial.print(g.gyro.z);
Serial.println(" rad/s");
Serial.print("Temperature: ");
Serial.print(temp.temperature);
Serial.println(" degC");
Serial.println("");
delay(500);
}
Как работает код
Начните с подключения необходимых библиотек для датчика MPU-6050: Adafruit_MPU6050 и Adafruit_Sensor.
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
Создайте объект Adafruit_MPU6050 с именем mpu для управления датчиком.
Adafruit_MPU6050 mpu;
setup()
В функции setup() инициализируйте Serial Monitor на скорости 115200 бод.
Serial.begin(115200);
Инициализируйте датчик MPU-6050.
if (!mpu.begin()) {
Serial.println("Sensor init failed");
while (1)
yield();
}
Установите диапазон измерения акселерометра:
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
Установите диапазон измерения гироскопа:
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
Установите полосу пропускания фильтра:
mpu.setFilterBandwidth(MPU6050_BAND_5_HZ);
loop()
В функции loop() мы будем получать показания датчика и отображать их в Serial Monitor.
Сначала вам нужно получить новые события датчика с текущими показаниями.
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
Наконец, выведите показания. Для ускорения:
a.acceleration.x: получает ускорение по оси x;a.acceleration.y: получает ускорение по оси y;a.acceleration.z: получает ускорение по оси z.
Ускорение измеряется в метрах в секунду в квадрате (м/с²).
Serial.print("Acceleration X: ");
Serial.print(a.acceleration.x);
Serial.print(", Y: ");
Serial.print(a.acceleration.y);
Serial.print(", Z: ");
Serial.print(a.acceleration.z);
Serial.println(" m/s^2");
Для получения показаний гироскопа:
g.gyro.x: получает угловую скорость по оси x;g.gyro.y: получает угловую скорость по оси y;g.gyro.z: получает угловую скорость по оси z.
Угловая скорость измеряется в радианах в секунду (рад/с).
Serial.print("Rotation X: ");
Serial.print(g.gyro.x);
Serial.print(", Y: ");
Serial.print(g.gyro.y);
Serial.print(", Z: ");
Serial.print(g.gyro.z);
Serial.println(" rad/s");
Наконец, выведите температуру — она измеряется в градусах Цельсия. Для доступа к показаниям температуры используйте temp.temperature.
Serial.print("Temperature: ");
Serial.print(temp.temperature);
Serial.println(" degC");
Новые показания датчика отображаются каждые 500 миллисекунд.
delay(500);
Демонстрация
Загрузите код на вашу плату ESP8266. Перейдите в Tools > Board и выберите используемую плату ESP8266. Перейдите в Tools > Port и выберите порт, к которому подключена ваша плата. Затем нажмите кнопку «Загрузить» (Upload).
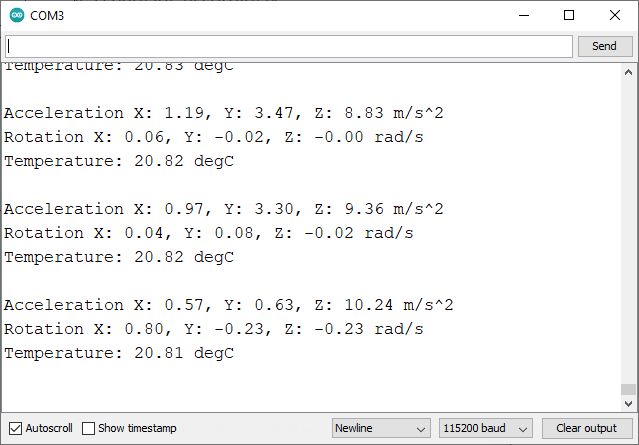
Откройте Serial Monitor на скорости 115200 бод, нажмите встроенную кнопку RST. Будут отображены показания датчика.
Перемещайте датчик и наблюдайте, как изменяются значения.
Калибровка датчика
В идеале, когда датчик неподвижен, значения гироскопа должны быть равны нулю по всем осям, что в нашем случае не так. Когда датчик неподвижен, мы получаем следующие значения гироскопа:
x: 0,06 рад/с
y: -0,02 рад/с
z: 0,00 рад/с
В практических приложениях необходимо учитывать погрешность и корректировать значения в коде для получения более точных показаний.
То же самое происходит и со значениями ускорения. Ускорение по оси z должно быть ближе к гравитационному ускорению (9,8 м/с²), а по осям x и y оно должно быть ближе к нулю. В нашем случае приблизительные значения, которые мы получаем, когда датчик неподвижен, следующие:
x: 0,71 м/с²
y: 0,28 м/с²
z: 9,43 м/с²
Отображение показаний гироскопа и акселерометра на OLED-дисплее
Библиотека Adafruit MPU6050 предоставляет пример, который отображает показания гироскопа и акселерометра MPU-6050 на OLED-дисплее.
Необходимые компоненты
Вот компоненты, необходимые для выполнения этого примера:
ESP8266 (читайте Лучшие платы разработки ESP8266)
Вы можете воспользоваться приведёнными выше ссылками или перейти непосредственно на MakerAdvisor.com/tools, чтобы найти все компоненты для ваших проектов по лучшей цене!
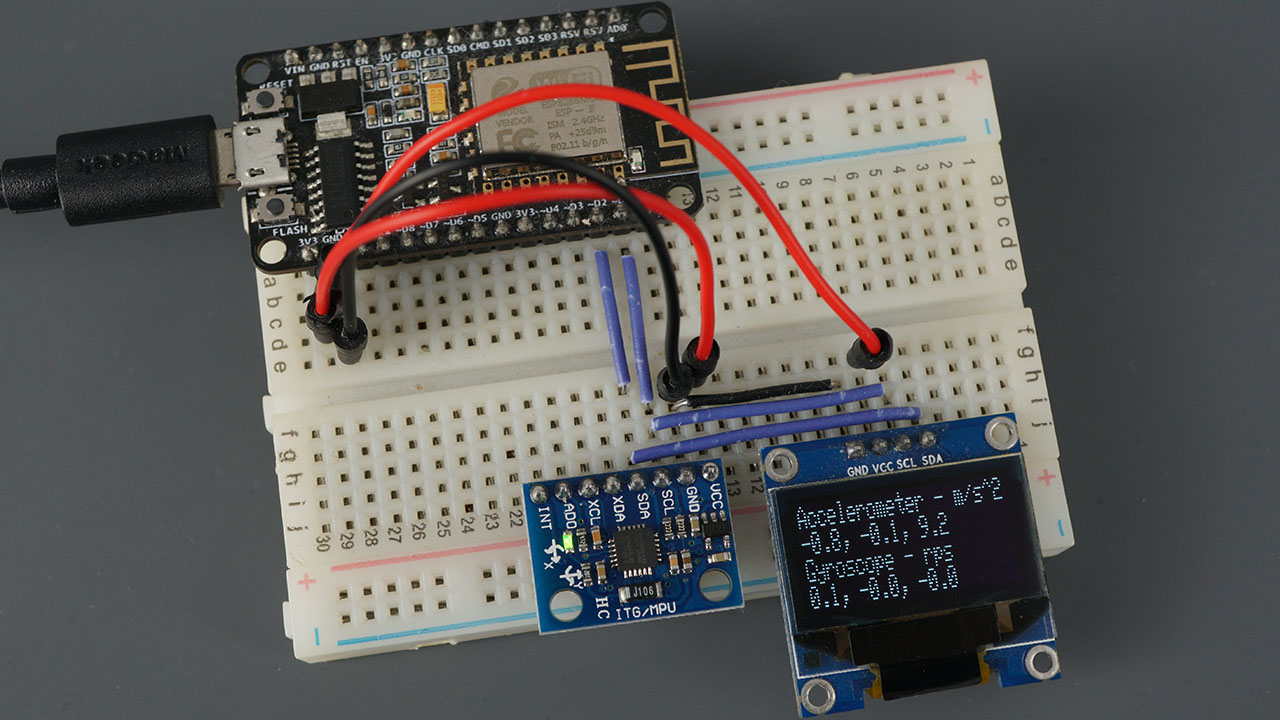
Схема подключения — ESP8266 NodeMCU с MPU-6050 и OLED-дисплеем
Подключите все компоненты, как показано на следующей схеме. Поскольку OLED-дисплей и датчик MPU-6050 используют разные I2C-адреса, мы можем подключить их к одной и той же шине I2C (одни и те же выводы на ESP8266).
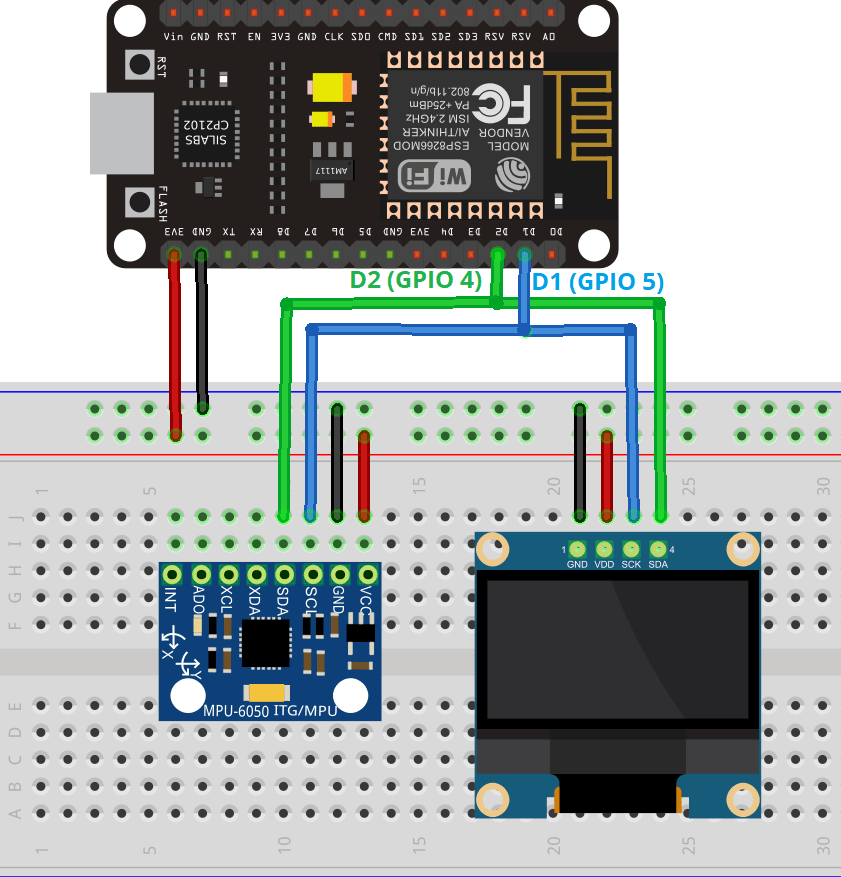
Подробнее об использовании OLED-дисплея с ESP8266: ESP8266 NodeMCU OLED-дисплей с Arduino IDE.
Код — отображение показаний датчика MPU-6050 на OLED-дисплее
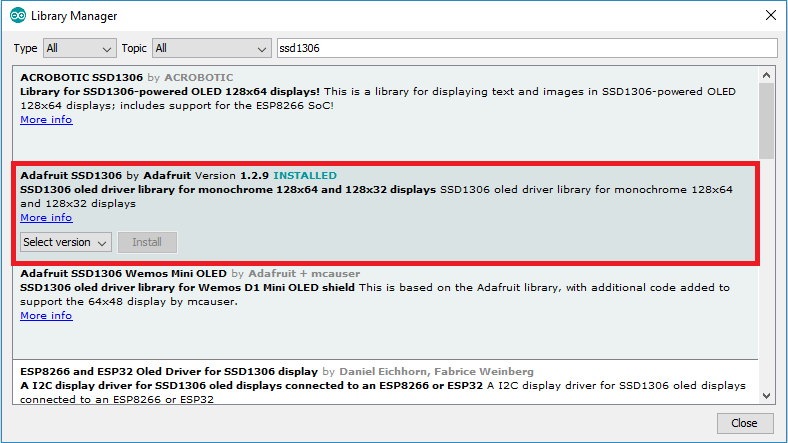
Для использования этого примера убедитесь, что у вас установлена библиотека Adafruit SSD1306. Эту библиотеку можно установить через Менеджер библиотек Arduino.
Перейдите в Sketch > Library > Manage Libraries и найдите «SSD1306», затем установите библиотеку SSD1306 от Adafruit.
Для этого примера скопируйте следующий код или перейдите в File > Examples > Adafruit MPU6050 > MPU6050_oled.
// Basic OLED demo for accelerometer readings from Adafruit MPU6050
// ESP32 Guide: https://RandomNerdTutorials.com/esp32-mpu-6050-accelerometer-gyroscope-arduino/
// ESP8266 Guide: https://RandomNerdTutorials.com/esp8266-nodemcu-mpu-6050-accelerometer-gyroscope-arduino/
// Arduino Guide: https://RandomNerdTutorials.com/arduino-mpu-6050-accelerometer-gyroscope/
#include <Adafruit_MPU6050.h>
#include <Adafruit_SSD1306.h>
#include <Adafruit_Sensor.h>
Adafruit_MPU6050 mpu;
Adafruit_SSD1306 display = Adafruit_SSD1306(128, 64, &Wire);
void setup() {
Serial.begin(115200);
// while (!Serial);
Serial.println("MPU6050 OLED demo");
if (!mpu.begin()) {
Serial.println("Sensor init failed");
while (1)
yield();
}
Serial.println("Found a MPU-6050 sensor");
// SSD1306_SWITCHCAPVCC = generate display voltage from 3.3V internally
if (!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3C for 128x64
Serial.println(F("SSD1306 allocation failed"));
for (;;)
; // Don't proceed, loop forever
}
display.display();
delay(500); // Pause for 2 seconds
display.setTextSize(1);
display.setTextColor(WHITE);
display.setRotation(0);
}
void loop() {
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
display.clearDisplay();
display.setCursor(0, 0);
Serial.print("Accelerometer ");
Serial.print("X: ");
Serial.print(a.acceleration.x, 1);
Serial.print(" m/s^2, ");
Serial.print("Y: ");
Serial.print(a.acceleration.y, 1);
Serial.print(" m/s^2, ");
Serial.print("Z: ");
Serial.print(a.acceleration.z, 1);
Serial.println(" m/s^2");
display.println("Accelerometer - m/s^2");
display.print(a.acceleration.x, 1);
display.print(", ");
display.print(a.acceleration.y, 1);
display.print(", ");
display.print(a.acceleration.z, 1);
display.println("");
Serial.print("Gyroscope ");
Serial.print("X: ");
Serial.print(g.gyro.x, 1);
Serial.print(" rps, ");
Serial.print("Y: ");
Serial.print(g.gyro.y, 1);
Serial.print(" rps, ");
Serial.print("Z: ");
Serial.print(g.gyro.z, 1);
Serial.println(" rps");
display.println("Gyroscope - rps");
display.print(g.gyro.x, 1);
display.print(", ");
display.print(g.gyro.y, 1);
display.print(", ");
display.print(g.gyro.z, 1);
display.println("");
display.display();
delay(100);
}
Как работает код
Начните с подключения необходимых библиотек для датчика MPU-6050 и OLED-дисплея.
#include <Adafruit_MPU6050.h>
#include <Adafruit_SSD1306.h>
#include <Adafruit_Sensor.h>
Создайте объект Adafruit_MPU6050 с именем mpu для управления датчиком.
Adafruit_MPU6050 mpu;
Создайте объект Adafruit_SSD1306 с именем display для управления OLED-дисплеем. Это для дисплея с разрешением 128x64 пикселей.
Adafruit_SSD1306 display = Adafruit_SSD1306(128, 64, &Wire);
setup()
В функции setup() инициализируйте Serial Monitor на скорости 115200 бод.
Serial.begin(115200);
Инициализируйте датчик MPU-6050.
if (!mpu.begin()) {
Serial.println("Sensor init failed");
while (1)
yield();
}
Инициализируйте OLED-дисплей.
// SSD1306_SWITCHCAPVCC = generate display voltage from 3.3V internally
if (!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3C for 128x64
Serial.println(F("SSD1306 allocation failed"));
for (;;)
; // Don't proceed, loop forever
}
display.display();
Установите размер шрифта и цвет для дисплея.
display.setTextSize(1);
display.setTextColor(WHITE);
display.setRotation(0);
loop()
В функции loop() мы будем получать показания датчика и отображать их на OLED-дисплее.
Начните с создания событий для каждого измерения: акселерометр, гироскоп и температура.
sensors_event_t a, g, temp;
Получите новые показания датчика.
mpu.getEvent(&a, &g, &temp);
Очистите дисплей в каждой итерации loop() для записи новых показаний.
display.clearDisplay();
Установите курсор дисплея в позицию (0,0) — верхний левый угол. Текст будет выводиться начиная с этой позиции.
display.setCursor(0, 0);
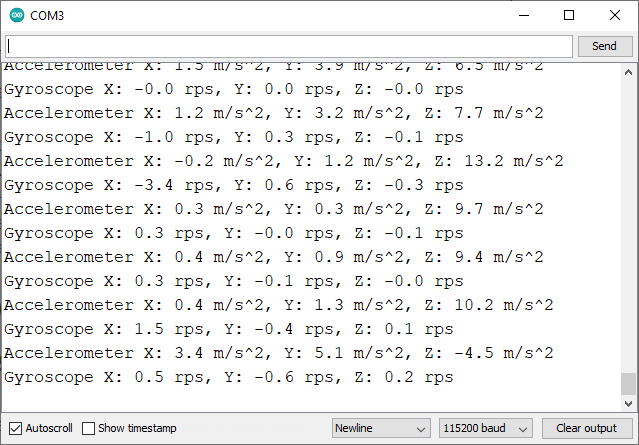
Следующие строки выводят показания акселерометра в Serial Monitor.
Serial.print("Accelerometer ");
Serial.print("X: ");
Serial.print(a.acceleration.x, 1);
Serial.print(" m/s^2, ");
Serial.print("Y: ");
Serial.print(a.acceleration.y, 1);
Serial.print(" m/s^2, ");
Serial.print("Z: ");
Serial.print(a.acceleration.z, 1);
Serial.println(" m/s^2");
Следующие строки отображают значения ускорения по осям x, y и z на OLED-дисплее.
display.println("Accelerometer - m/s^2");
display.print(a.acceleration.x, 1);
display.print(", ");
display.print(a.acceleration.y, 1);
display.print(", ");
display.print(a.acceleration.z, 1);
display.println("");
Вывод показаний гироскопа в Serial Monitor.
Serial.print("Gyroscope ");
Serial.print("X: ");
Serial.print(g.gyro.x, 1);
Serial.print(" rps, ");
Serial.print("Y: ");
Serial.print(g.gyro.y, 1);
Serial.print(" rps, ");
Serial.print("Z: ");
Serial.print(g.gyro.z, 1);
Serial.println(" rps");
Наконец, выведите показания гироскопа на дисплей.
display.println("Gyroscope - rps");
display.print(g.gyro.x, 1);
display.print(", ");
display.print(g.gyro.y, 1);
display.print(", ");
display.print(g.gyro.z, 1);
display.println("");
И наконец, вызовите display.display(), чтобы фактически отобразить показания на OLED-дисплее.
display.display();
Новые показания отображаются каждые 100 миллисекунд.
delay(100);
Демонстрация
Загрузите код на вашу плату ESP8266. Перейдите в Tools > Board и выберите используемую плату ESP8266. Перейдите в Tools > Port и выберите порт, к которому подключена ваша плата. Затем нажмите кнопку «Загрузить» (Upload).
Откройте Serial Monitor на скорости 115200 бод, нажмите встроенную кнопку RST. Показания датчика будут отображены как в Serial Monitor, так и на OLED-дисплее.
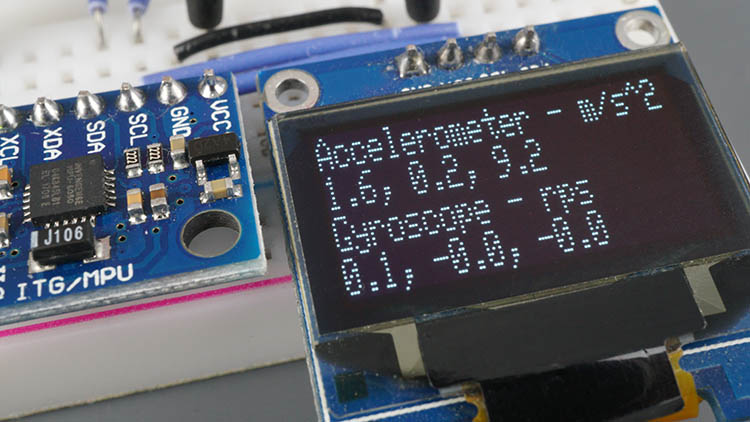
Перемещайте датчик и наблюдайте, как изменяются значения.
Вы можете посмотреть видеодемонстрацию:
Заключение
MPU-6050 — это акселерометр и гироскоп. Он измеряет ускорение по осям x, y и z, а также угловую скорость. Этот модуль также измеряет температуру.
Этот модуль датчика взаимодействует по протоколу I2C. Поэтому подключение очень простое. Достаточно подключить датчик к стандартным выводам I2C ESP8266.
В этом руководстве вы узнали, как подключить датчик и получить его показания. Мы надеемся, что это руководство по началу работы оказалось полезным. У нас есть руководства для других популярных датчиков:
ESP8266 с датчиком температуры и влажности DHT11/DHT22 в Arduino IDE
ESP8266 с BME280 в Arduino IDE (давление, температура, влажность)
ESP8266 с датчиком температуры DS18B20 в Arduino IDE (один датчик, несколько датчиков, веб-сервер)
ESP8266 с датчиком окружающей среды BME680 (газ, давление, влажность, температура)
Узнайте больше о ESP8266 из наших ресурсов: