Raspberry Pi Pico: ультразвуковой датчик HC-SR04 (Arduino IDE)
Узнайте, как использовать ультразвуковой датчик HC-SR04 с Raspberry Pi Pico для измерения расстояния до объекта, программируя плату в Arduino IDE. В этом руководстве рассматривается подключение датчика к плате RPi Pico, простой пример скетча для вычисления расстояния до объекта, а также быстрый и простой проект по отображению расстояния на OLED-дисплее.

Примечание
Впервые работаете с Raspberry Pi Pico? Начните знакомство с Raspberry Pi Pico здесь.
Raspberry Pi Pico с Arduino IDE
Вам необходимо установить платы Raspberry Pi Pico в Arduino IDE, и вы должны знать, как загружать код на плату. Ознакомьтесь со следующим руководством, если вы ещё этого не сделали:
Знакомство с ультразвуковым датчиком HC-SR04
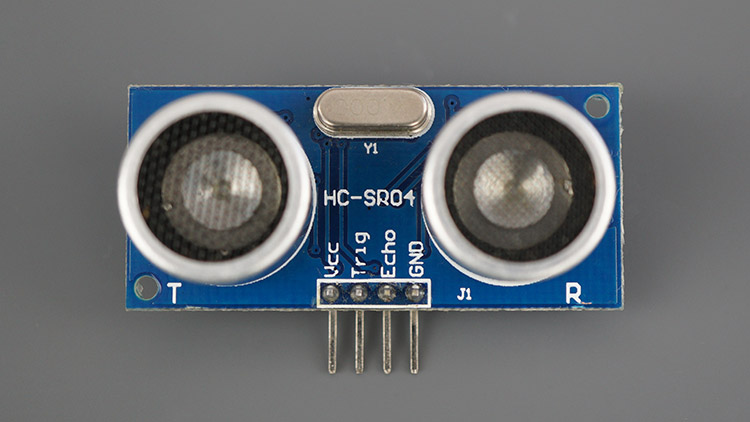
Ультразвуковой датчик HC-SR04 использует сонар для определения расстояния до объекта. Этот датчик измеряет расстояние от 2 см до 400 см (от 0,8 дюйма до 157 дюймов) с точностью 0,3 см (0,1 дюйма), что вполне достаточно для большинства любительских проектов. Кроме того, этот модуль поставляется с ультразвуковым передатчиком и приёмником.
На следующем изображении показан ультразвуковой датчик HC-SR04.
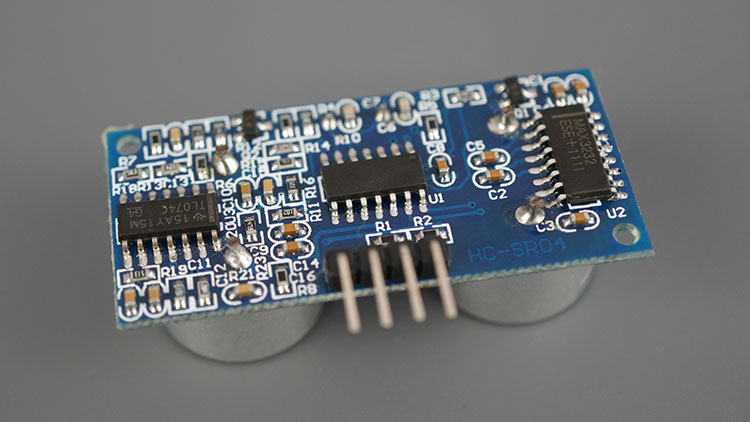
На следующем изображении показана другая сторона датчика.
Примечание
Хотите альтернативу ультразвуковому датчику HC-SR04? Ознакомьтесь с радарным датчиком приближения RCWL-0516:
Технические характеристики ультразвукового датчика HC-SR04
В следующей таблице приведены основные характеристики и спецификации ультразвукового датчика HC-SR04. Для получения дополнительной информации обратитесь к даташиту датчика.
Напряжение питания |
5В DC |
Рабочий ток |
15 мА |
Рабочая частота |
40 кГц |
Максимальная дальность |
4 метра |
Минимальная дальность |
2 см |
Угол измерения |
15° |
Разрешение |
0,3 см |
Входной сигнал триггера |
TTL-импульс длительностью 10 мкс |
Выходной сигнал Echo |
TTL-импульс, пропорциональный расстоянию |
Габариты |
45 мм x 20 мм x 15 мм |
Распиновка ультразвукового датчика HC-SR04
Вот распиновка ультразвукового датчика HC-SR04.
VCC |
Питание датчика (5В) |
Trig |
Вход триггера (Trigger Input Pin) |
Echo |
Выход эхо-сигнала (Echo Output Pin) |
GND |
Общая земля |
Как работает ультразвуковой датчик HC-SR04?
Ультразвуковой датчик использует сонар для определения расстояния до объекта. Вот как это работает:
Ультразвуковой передатчик (вывод trig) излучает высокочастотный звук (40 кГц).
Звук распространяется по воздуху. Если он встречает объект, то отражается обратно к модулю.
Ультразвуковой приёмник (вывод echo) принимает отражённый звук (эхо).
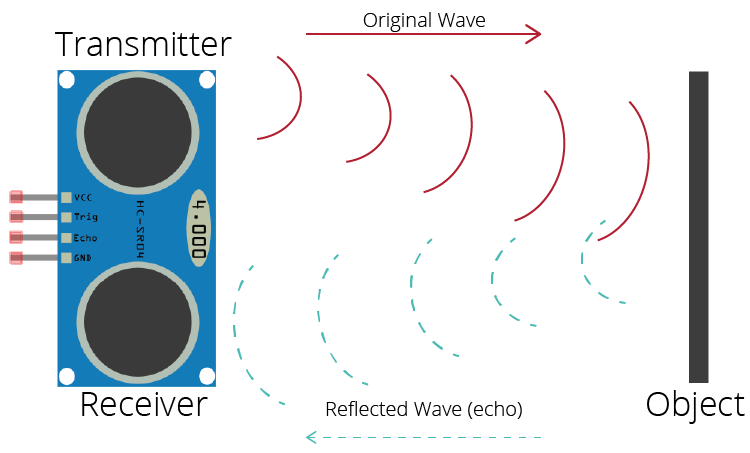
Учитывая скорость звука в воздухе и время прохождения (время, прошедшее с момента передачи и приёма сигнала), мы можем вычислить расстояние до объекта. Вот формула:
расстояние до объекта = ((скорость звука в воздухе) * время) / 2
скорость звука в воздухе при 20°C (68°F) = 343 м/с
Необходимые компоненты
Для выполнения этого руководства вам понадобятся следующие компоненты:
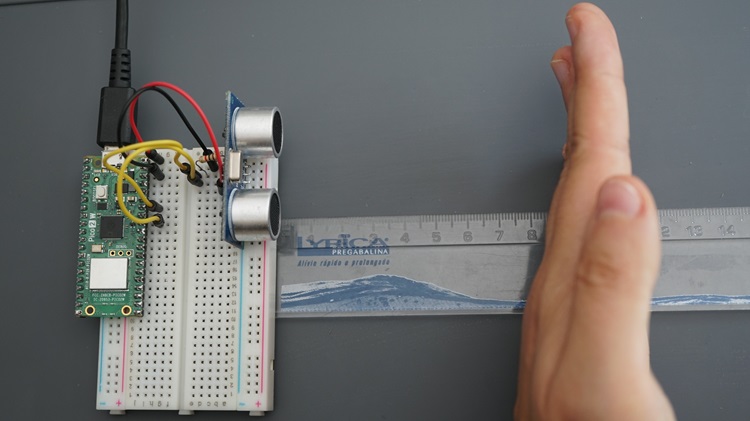
Схема подключения RPi Pico с ультразвуковым датчиком HC-SR04
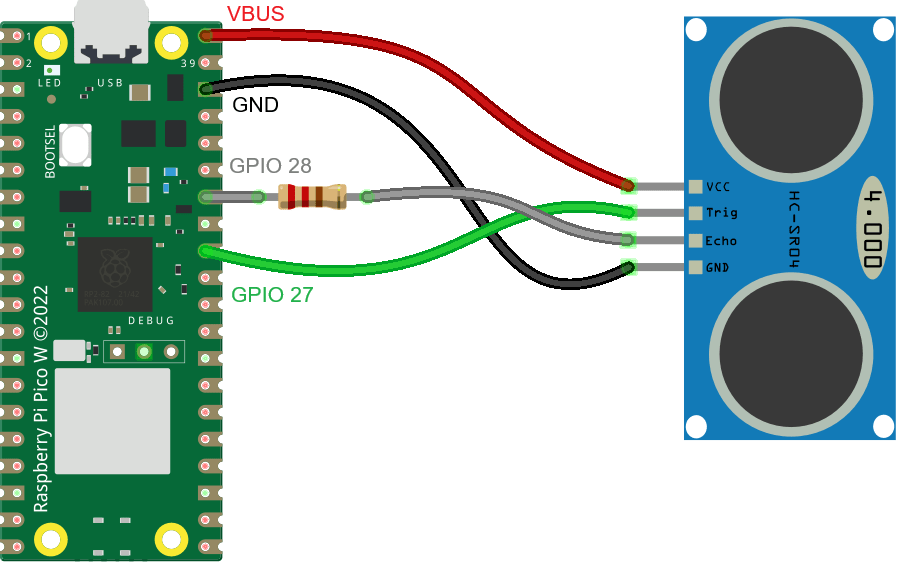
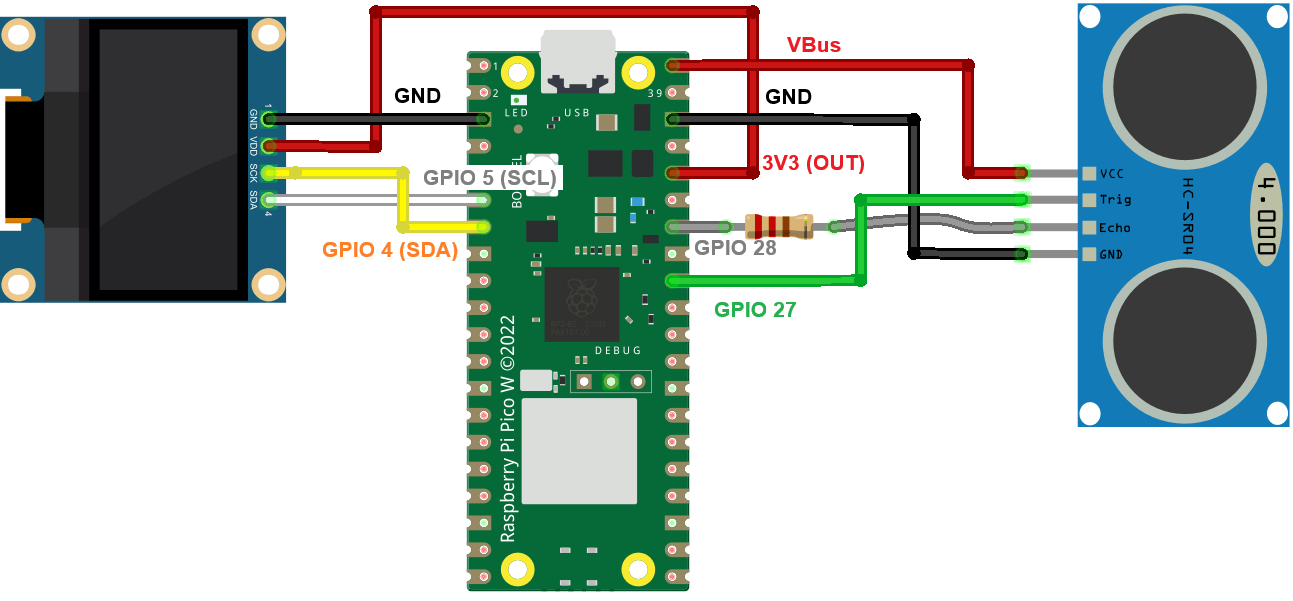
Подключите ультразвуковой датчик HC-SR04 к плате RPi Pico, как показано на следующей схеме. Мы подключаем вывод Trig к GPIO 27, а вывод Echo к GPIO 28, но вы можете использовать любые другие подходящие выводы.
Ультразвуковой датчик |
RPi Pico |
|---|---|
VCC |
VBus (5В) |
Trig |
GPIO 27 |
Echo |
GPIO 28 последовательно с резистором 1 кОм |
GND |
GND |
Примечание
Рекомендуем к прочтению: Raspberry Pi Pico и Pico W — Руководство по распиновке: описание GPIO.
Код — Получение расстояния до объекта с помощью HC-SR04 и RPi Pico
Следующий скетч — это простой пример того, как можно получить расстояние между датчиком и объектом, используя плату RPi Pico, запрограммированную с помощью ядра Arduino.
/*********
Rui Santos & Sara Santos - Random Nerd Tutorials
Complete project details at https://RandomNerdTutorials.com/raspberry-pi-pico-hc-sr04-arduino/
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files.
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
*********/
const int trigPin = 27;
const int echoPin = 28;
//define sound speed in cm/uS
#define SOUND_SPEED 0.034
#define CM_TO_INCH 0.393701
long duration;
float distanceCm;
float distanceInch;
void setup() {
Serial.begin(115200); // Starts the serial communication
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
}
void loop() {
// Clears the trigPin
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(echoPin, HIGH);
// Calculate the distance
distanceCm = duration * SOUND_SPEED/2;
// Convert to inches
distanceInch = distanceCm * CM_TO_INCH;
// Prints the distance in the Serial Monitor
Serial.print("Distance (cm): ");
Serial.println(distanceCm);
Serial.print("Distance (inch): ");
Serial.println(distanceInch);
delay(1000);
}
Загрузите код на плату, и он сразу заработает. Продолжайте чтение, если хотите узнать, как работает код, или перейдите к разделу демонстрации.
Как работает код
Сначала определяем выводы триггера и эхо.
const int trigPin = 27;
const int echoPin = 28;
В этом примере мы используем GPIO 27 и GPIO 28. Но вы можете использовать любые другие подходящие GPIO — читайте Raspberry Pi Pico и Pico W — Руководство по распиновке: описание GPIO.
Переменная SOUND_SPEED хранит скорость звука в воздухе при 20°C. Мы используем значение в см/мкс.
#define SOUND_SPEED 0.034
Переменная CM_TO_INCH позволяет нам преобразовать расстояние из сантиметров в дюймы.
#define CM_TO_INCH 0.393701
Затем инициализируем следующие переменные.
long duration;
float distanceCm;
float distanceInch;
Переменная duration хранит время прохождения ультразвуковых волн (время, прошедшее с момента передачи и приёма импульса). Переменные distanceCm и distanceInch, как следует из названий, хранят расстояние до объекта в сантиметрах и дюймах.
setup()
В функции setup() инициализируем последовательную связь на скорости 115200 бод, чтобы мы могли выводить измерения в монитор последовательного порта.
Serial.begin(115200); // Starts the serial communication
Определяем вывод триггера как OUTPUT — вывод триггера излучает ультразвук. И определяем вывод эхо как INPUT — вывод эхо принимает отражённую волну и отправляет на RPi Pico сигнал, пропорциональный времени прохождения.
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
loop()
В функции loop() следующие строки генерируют импульс HIGH длительностью 10 мкс на выводе триггера — это означает, что вывод излучит ультразвук. Обратите внимание, что перед отправкой импульса мы подаём короткий импульс LOW, чтобы гарантировать чистый импульс HIGH.
// Clears the trigPin
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
Мы используем функцию pulseIn() для получения времени прохождения звуковой волны:
duration = pulseIn(echoPin, HIGH);
Функция pulseIn() считывает импульс HIGH или LOW на выводе. Она принимает в качестве аргументов вывод и состояние импульса (HIGH или LOW). Она возвращает длительность импульса в микросекундах. Длительность импульса соответствует времени, за которое звук прошёл до объекта, плюс время обратного пути.
Затем мы просто вычисляем расстояние до объекта с учётом скорости звука.
distanceCm = duration * SOUND_SPEED/2;
Преобразуем расстояние в дюймы:
distanceInch = distanceCm * CM_TO_INCH;
И, наконец, выводим результаты в монитор последовательного порта.
Serial.print("Distance (cm): ");
Serial.println(distanceCm);
Serial.print("Distance (inch): ");
Serial.println(distanceInch);
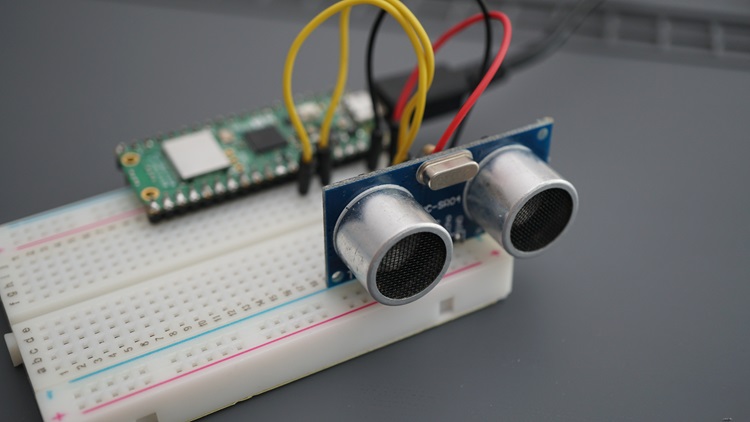
Демонстрация
Загрузите код на Raspberry Pi Pico.
Для загрузки кода на Raspberry Pi Pico плата должна быть в режиме загрузчика (bootloader mode).
Если на Raspberry Pi в данный момент установлена прошивка MicroPython, вам необходимо вручную перевести плату в режим загрузчика. Для этого подключите Raspberry Pi Pico к компьютеру, одновременно удерживая кнопку BOOTSEL. На компьютере откроется окно нового съёмного диска. Вы можете проигнорировать его и закрыть это окно.
Для последующих загрузок с помощью Arduino IDE плата должна автоматически переходить в режим загрузчика без необходимости нажимать кнопку BOOTSEL.
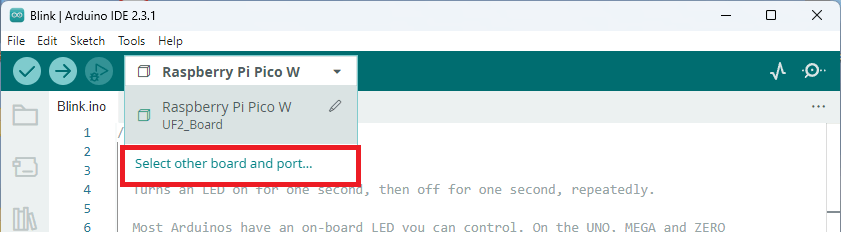
Теперь откройте верхнее выпадающее меню и нажмите Select other board and port… (Выбрать другую плату и порт…).
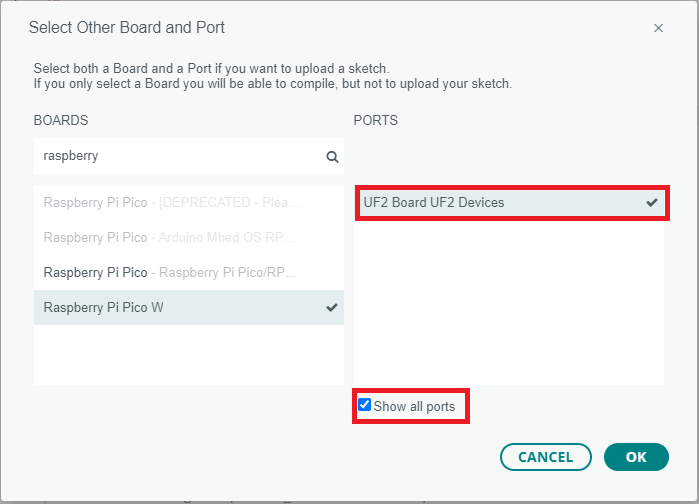
Выберите модель Raspberry Pi Pico, которую вы используете.
COM-порт может не отображаться при первой загрузке, поэтому необходимо отметить опцию Show all ports (Показать все порты). Затем выберите COM-порт.
Теперь вы можете загрузить код.

Вы должны увидеть сообщение об успешной загрузке.
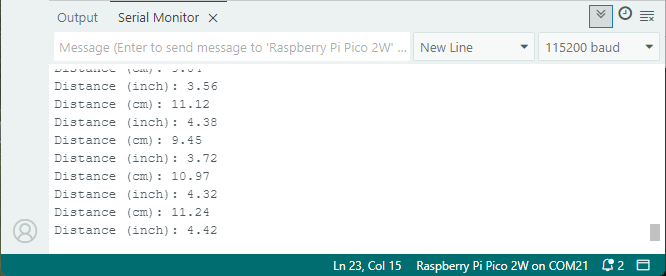
После загрузки кода откройте монитор последовательного порта на скорости 115200 бод.
Расстояние до ближайшего объекта будет выводиться в мониторе последовательного порта.
Отображение расстояния (HC-SR04) на OLED-дисплее (RPi Pico с Arduino IDE)
Теперь, когда вы знаете, как получить расстояние до ближайшего объекта с помощью ультразвукового датчика HC-SR04, мы отобразим показания датчика на OLED-дисплее.
Примечание
Рекомендуем к прочтению: Raspberry Pi Pico: OLED-дисплей SSD1306 (Arduino IDE).
Необходимые компоненты
Вот список компонентов, необходимых для выполнения этого примера:
Схема подключения
Добавьте I2C OLED-дисплей к предыдущей схеме. Мы подключаем SDA к GPIO 4, а SCL к GPIO 5. Вы можете следовать следующей схеме подключения:
Установка библиотеки SSD1306
В Arduino IDE перейдите в Sketch > Include Library > Manage Libraries (Скетч > Подключить библиотеку > Управление библиотеками).
Затем найдите Adafruit SSD1306 и установите библиотеку.
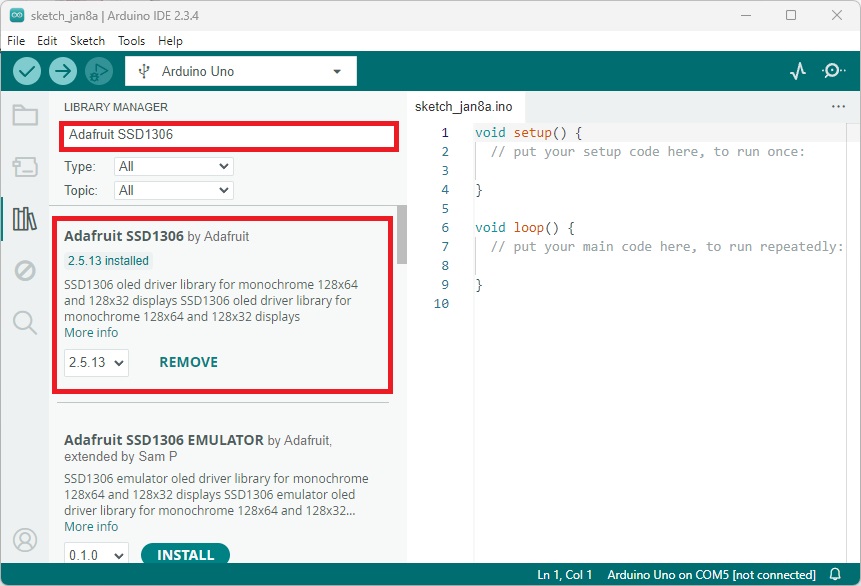
Также установите все остальные необходимые зависимости.
Отображение расстояния на OLED-дисплее
Скопируйте следующий код в Arduino IDE. Этот код получает расстояние от датчика HC-SR04 до объекта и отображает результат на OLED-дисплее.
/*********
Rui Santos & Sara Santos - Random Nerd Tutorials
Complete project details at https://RandomNerdTutorials.com/raspberry-pi-pico-hc-sr04-arduino/
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files.
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
*********/
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#define SCREEN_WIDTH 128 // OLED display width, in pixels
#define SCREEN_HEIGHT 64 // OLED display height, in pixels
// Declaration for an SSD1306 display connected to I2C (SDA, SCL pins)
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, -1);
const int trigPin = 27;
const int echoPin = 28;
//define sound speed in cm/uS
#define SOUND_SPEED 0.034
#define CM_TO_INCH 0.393701
long duration;
int distanceCm;
int distanceInch;
void setup() {
Serial.begin(115200);
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) {
Serial.println(F("SSD1306 allocation failed"));
for(;;);
}
delay(500);
display.clearDisplay();
display.setTextSize(2);
display.setTextColor(WHITE);
}
void loop() {
// Clears the trigPin
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(echoPin, HIGH);
// Calculate the distance
distanceCm = duration * SOUND_SPEED/2;
// Convert to inches
distanceInch = distanceCm * CM_TO_INCH;
// Prints the distance in the Serial Monitor
Serial.print("Distance (cm): ");
Serial.println(distanceCm);
Serial.print("Distance (inch): ");
Serial.println(distanceInch);
display.clearDisplay();
display.setCursor(0, 25);
//Display distance in cm
display.print(distanceCm);
display.print(" cm");
// Display distance in inches
/* display.print(distanceInch);
display.print(" in");*/
display.display();
delay(500);
}
Как работает код
Начнём с подключения необходимых библиотек для OLED-дисплея:
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
Определяем ширину и высоту OLED-дисплея. Мы используем OLED-дисплей 128x64:
#define SCREEN_WIDTH 128 // OLED display width, in pixels
#define SCREEN_HEIGHT 64 // OLED display height, in pixels
Создаём объект Adafruit_SSD1306 с именем display для управления OLED-дисплеем.
Adafruit_SSD1306 display = Adafruit_SSD1306(128, 64, &Wire);
Определяем выводы, к которым подключён датчик HC-SR04.
const int trigPin = 27;
const int echoPin = 28;
Создаём переменные для хранения расстояния и длительности между передачей и приёмом звуковых волн.
long duration;
int distanceCm;
int distanceInch;
setup()
В функции setup() инициализируем последовательную связь на скорости 115200 бод, чтобы мы могли выводить результаты в монитор последовательного порта.
Serial.begin(115200);
Определяем вывод триггера как OUTPUT, а вывод эхо как INPUT.
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
Инициализируем OLED-дисплей:
if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) {
Serial.println(F("SSD1306 allocation failed"));
for(;;);
}
Устанавливаем размер и цвет шрифта для дисплея.
display.setTextSize(2);
display.setTextColor(WHITE);
loop()
В функции loop() мы получаем расстояние и отображаем его на OLED-дисплее.
Получаем расстояние (мы уже объясняли в предыдущем разделе, как вычисляется расстояние).
// Clears the trigPin
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(echoPin, HIGH);
// Calculate the distance
distanceCm = duration * SOUND_SPEED/2;
// Convert to inches
distanceInch = distanceCm * CM_TO_INCH;
Выводим расстояние в монитор последовательного порта.
// Prints the distance on the Serial Monitor
Serial.print("Distance (cm): ");
Serial.println(distanceCm);
Serial.print("Distance (inch): ");
Serial.println(distanceInch);
Очищаем дисплей в каждой итерации loop() для записи новых показаний.
display.clearDisplay();
Устанавливаем курсор дисплея в позицию (0, 25).
display.setCursor(0, 25);
Следующие строки выводят расстояние в сантиметрах на OLED-дисплей.
// Display static text
display.print(distanceCm);
display.print(" cm");
Закомментируйте предыдущие строки и раскомментируйте следующие, если хотите отображать показания в дюймах.
/* Display distance in inches
display.print(distanceInch);
display.print(" in");*/
Наконец, вызываем display.display(), чтобы фактически отобразить показания на OLED-дисплее.
display.display();
Расстояние обновляется каждые 500 миллисекунд.
delay(500);
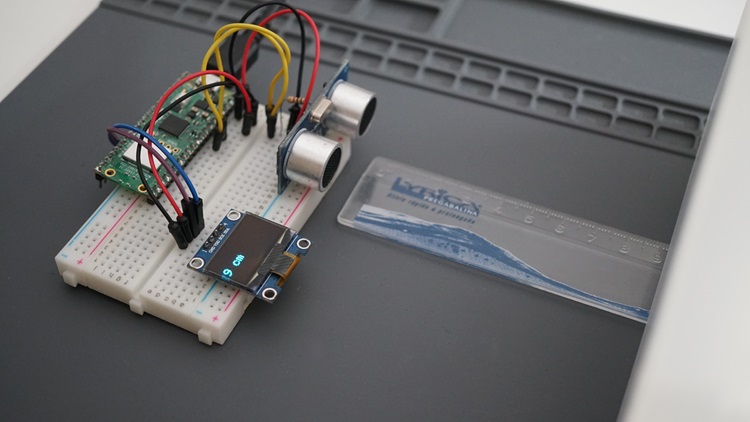
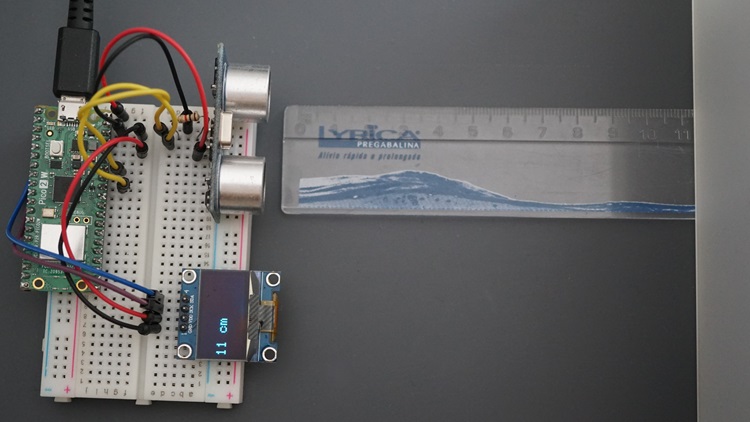
Демонстрация
Загрузите код на Raspberry Pi Pico.
Расстояние до ближайшего объекта будет отображаться на OLED-экране.
Заключение
Ультразвуковой датчик HC-SR04 позволяет определять расстояние до объекта. В этом руководстве вы узнали, как использовать HC-SR04 с RPi Pico. У нас есть руководства для других популярных датчиков с RPi Pico, использующих Arduino IDE, которые могут вас заинтересовать:
Raspberry Pi Pico с анемометром: измерение скорости ветра (Arduino IDE)
Raspberry Pi Pico: датчик окружающей среды BME680 (Arduino IDE)
Raspberry Pi Pico: обнаружение движения с помощью PIR-датчика (Arduino IDE)
Raspberry Pi Pico: BME280 — получение температуры, влажности и давления (Arduino IDE)
Raspberry Pi Pico: радарный датчик приближения RCWL-0516 (Arduino IDE)
Raspberry Pi Pico: 20+ бесплатных руководств по датчикам и модулям