Начало работы с TinkerKit Braccio Robot
TinkerKit Braccio — это полностью функциональная роботизированная рука, управляемая через Arduino.
TinkerKit Braccio — это полностью функциональная роботизированная рука, управляемая через Arduino. Её можно собрать несколькими способами для выполнения различных задач, таких как перемещение объектов. Вы также можете прикрепить камеру или солнечную панель. Существует множество способов, которыми Braccio может расширить возможности ваших устройств.
Сборка
Прежде чем вы сможете использовать TinkerKit Braccio, вам необходимо его собрать, поэтому выделите время, найдите подходящий стол с достаточным пространством для удобного размещения всех деталей и следуйте нашим инструкциям.
Вы можете следовать нашему печатному руководству, доступному внутри коробки, или вы можете скачать электронную копию.
Если вы предпочитаете увидеть все шаги по сборке, мы подготовили видео, которое вы можете воспроизводить, останавливать и повторять по мере необходимости.
Модификация вашего Braccio
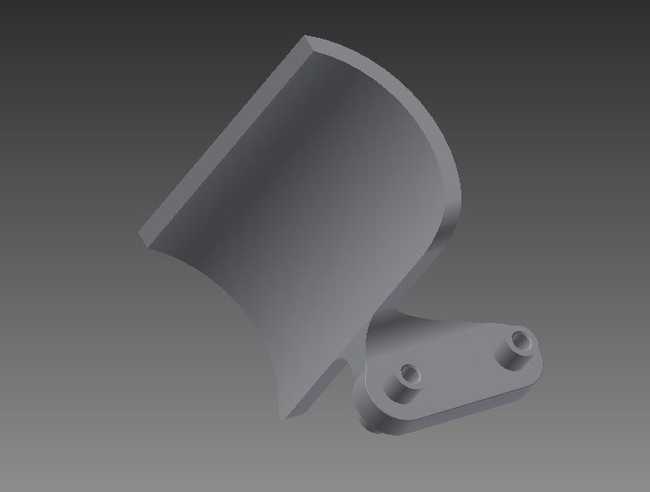
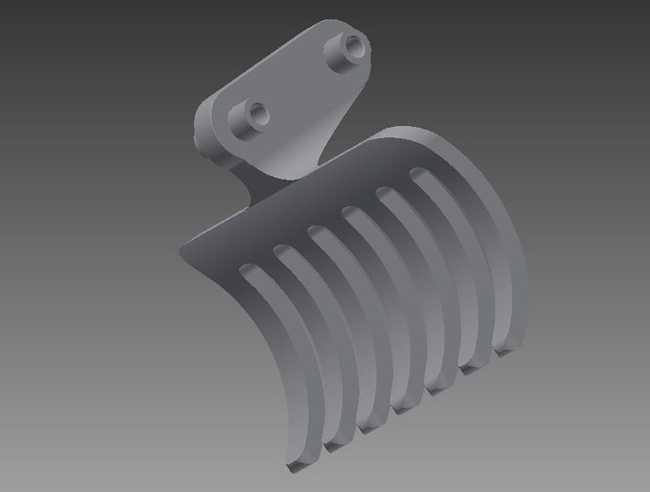
Мы подготовили для вас набор альтернативных пальцев, которые изменяют возможности Braccio. Один из них — без какого-либо конкретного инструмента, и вы можете начать с 3D-файла для создания собственного инструмента. Предоставляемые форматы — STL (3D Mesh) и IPT (Autodesk Inventor).
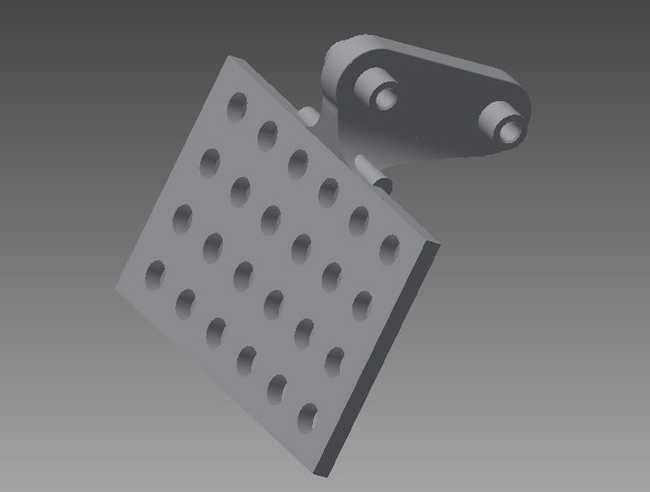
Это палец с 1000 отверстиями, IPT-файл здесь и STL-файл здесь.



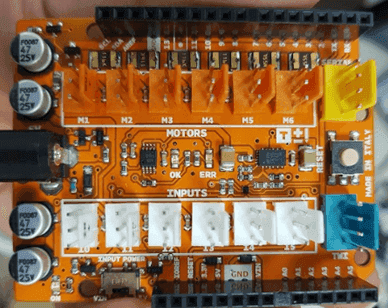
Braccio Shield
Входящий в комплект шилд Braccio позволяет подключить сервоприводы непосредственно к плате Arduino.
Braccio Shield V4
Последняя версия шилда Braccio — V4; вы можете узнать её по переключателю питания, который необходим для правильного подключения Arduino Yun, Tian и Primo: положение «VIN» для Yun, Tian и Primo, «5V» для остальных плат.
Для корректного использования шилда Braccio V4 необходима как минимум IDE версии 1.7.11.
На шилде Braccio V4 присутствует новая функция: «Soft-start» (мягкий запуск). Эта функция включена в функцию Braccio.begin() и запускает Braccio мягко и безопасно для защиты сервоприводов в первые 8 секунд.
Мягкий запуск работает каждый раз, когда вы вызываете Braccio.begin(). Во время этой фазы шилд не подаёт максимальный уровень напряжения на сервоприводы, и вы не должны использовать Braccio для подъёма каких-либо грузов.
Если Braccio ударится обо что-то или заблокируется, сбрасываемый предохранитель на шилде Braccio может отключить питание сервоприводов, и необходимо отсоединить и снова подключить разъём питания шилда Braccio.
С шилдом Braccio Shield V4 цифровой контакт 12 недоступен, если вы подключаете Braccio к шилду или используете разъёмы M1, M2, M3, M4, M5, M6 как цифровые.
Контакт 12 используется для управления уровнем напряжения мягкого запуска (на шилде вместо «12» стоит точка).
Если вы хотите отключить функцию мягкого запуска:
pinMode(12, OUTPUT); // необходимо установить HIGH на контакте 12
digitalWrite(12, HIGH);
Braccio.begin(SOFT_START_DISABLED); // установить параметр для отключения мягкого запуска
Таким образом вы можете нормально использовать разъёмы M1-M6 как цифровые и использовать Braccio без мягкого запуска.
Шилд имеет 12 стандартных 3-контактных разъёмов TinkerKit.
Разъёмы с маркировкой M1–M6 подключены к выходам с поддержкой ШИМ (PWM) платы Arduino. Разъёмы с маркировкой I0–I5 являются аналоговыми входами.
Каждое подключение мотора имеет защитный предохранитель:
M1–M4 ограничены 1,1 А
M5 и M6 ограничены 750 мА
Разъёмы подключены к следующим контактам на шилде:
Имя разъёма |
Контакт шилда |
|---|---|
M1 |
11 |
M2 |
10 |
M3 |
9 |
M4 |
6 |
M5 |
5 |
M6 |
3 |
I0 |
A0 (он же 14) |
I1 |
A1 (15) |
I2 |
A2 (16) |
I3 |
A3 (17) |
I4 |
A4 (18) |
I5 |
A5 (19) |
TWI |
SCL, SDA |
Serial |
RX0, TX0 |
4-контактный разъём TWI позволяет плате Arduino взаимодействовать с устройствами, поддерживающими протокол TWI (Two Wire Interface) или I2C (Inter-Integrated Circuit) через библиотеку Wire в Arduino. На разъёме предусмотрены подключения земли и 5 вольт.
Примечание
На Arduino UNO шина I2C использует аналоговые входы 4 и 5 (A4 и A5), тогда как на Arduino Mega подключение I2C находится на контактах 20 и 21. Использование разъёма TWI на UNO (и аналогичных платах) исключает использование этих аналоговых входов (A4 и A5).
4-контактный разъём SERIAL позволяет плате взаимодействовать с другими устройствами, поддерживающими последовательную связь. На разъёме для удобства предусмотрены подключения земли и 5 вольт.
Примечание
Если вы отправляете или получаете данные с компьютера, этот последовательный разъём недоступен.
Шилд содержит три индикаторных светодиода:
Зелёный светодиод (LED ON) сигнализирует о том, что шилд включён
Ещё один зелёный светодиод (LED OK) сигнализирует о правильном питании шилда
Красный светодиод (LED ERR) сигнализирует о неправильном питании шилда
Стандартная кнопка сброса 6 мм позволяет сбросить плату, а также имеется разъём для внешнего источника питания 5 В 5000 мА.
Совместимые платы:
Uno
Uno SMD
Uno WiFi
Due
Mega 2560
Ethernet
Leonardo
Leonardo ETH
M0
M0 Pro
Yun*
Tian*
Используя Arduino UNO WiFi, Leonardo Ethernet, Yun или Tian, вы можете управлять Braccio по сети с ПК или смартфона. Смотрите ниже демонстрацию.
Примечание для Tian или Yun
Будьте осторожны при установке шилда на Tian или Yun — не вдавливайте шилд слишком глубоко, чтобы не создать короткое замыкание между разъёмом M1 и Ethernet-разъёмом.
Примечание для Arduino YUN, Tian и Primo с Braccio Shield V4
Для совместимости с шилдом необходимо переключить переключатель питания в положение «VIN», поскольку Arduino Yun, Tian и Primo не могут получать питание через контакт 5V.
Библиотека TinkerKit Braccio
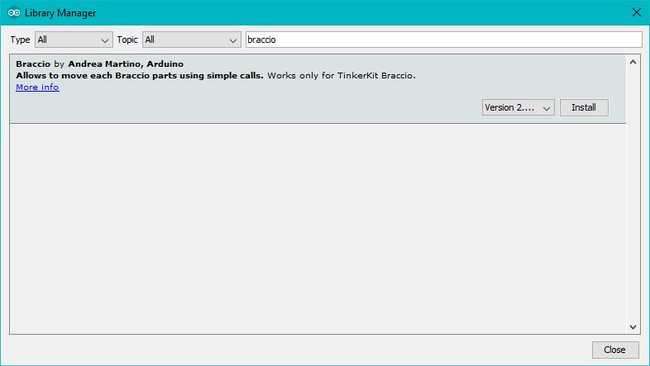
Для использования TinkerKit Braccio вам необходимо загрузить библиотеку Braccio с помощью менеджера библиотек Arduino Software (IDE); подробные инструкции по установке библиотек см. здесь.
В этой библиотеке доступны только две функции.
Braccio.Begin()
Инициализация и установка начального положения Braccio.
Все сервоприводы будут установлены в «безопасное» положение:
Base (M1): 90 градусов
Shoulder (M2): 45 градусов
Elbow (M3): 180 градусов
Wrist vertical (M4): 180 градусов
Wrist rotation (M5): 90 градусов
Gripper (M6): 10 градусов
Braccio.ServoMovement (step delay, M1, M2, M3, M4, M5, M6)
С помощью этой функции вы можете управлять всеми сервоприводами Braccio одной командой.
Step Delay: задержка в миллисекундах между перемещением каждого сервопривода. Допустимые значения от 10 до 30 мс.
M1: градусы основания. Допустимые значения от 0 до 180 градусов.
M2: градусы плеча. Допустимые значения от 15 до 165 градусов.
M3: градусы локтя. Допустимые значения от 0 до 180 градусов.
M4: градусы вертикального запястья. Допустимые значения от 0 до 180 градусов.
M5: градусы вращения запястья. Допустимые значения от 0 до 180 градусов.
M6: градусы захвата. Допустимые значения от 10 до 73 градусов. 10: язычок открыт, 73: захват закрыт.