ESP-MESH с ESP32 и ESP8266: начало работы (библиотека painlessMesh)
Узнайте, как использовать сетевой протокол ESP-MESH для создания mesh-сети с платами ESP32 и ESP8266 NodeMCU. ESP-MESH позволяет нескольким устройствам (узлам) взаимодействовать друг с другом в рамках единой беспроводной локальной сети. Он поддерживается на платах ESP32 и ESP8266. В этом руководстве мы покажем, как начать работу с ESP-MESH, используя ядро Arduino.
Эта статья охватывает следующие темы:
Arduino IDE
Если вы хотите программировать платы ESP32 и ESP8266 с помощью Arduino IDE, у вас должны быть установлены дополнения для ESP32 или ESP8266. Следуйте следующим руководствам:
Установка платы ESP32 в Arduino IDE (Windows, Mac OS X и Linux)
Установка платы ESP8266 в Arduino IDE (Windows, Mac OS X, Linux)
Если вы хотите программировать ESP32/ESP8266 с помощью VS Code + PlatformIO, следуйте следующему руководству:
Знакомство с ESP-MESH
Согласно документации Espressif:
«ESP-MESH — это сетевой протокол, построенный поверх протокола Wi-Fi. ESP-MESH позволяет множеству устройств (называемых узлами), распределённых по большой физической территории (как в помещении, так и на улице), быть объединёнными в единую беспроводную локальную сеть (WLAN).
ESP-MESH является самоорганизующимся и самовосстанавливающимся, что означает, что сеть может строиться и поддерживаться автономно.» Для получения дополнительной информации посетите официальную документацию ESP-MESH.
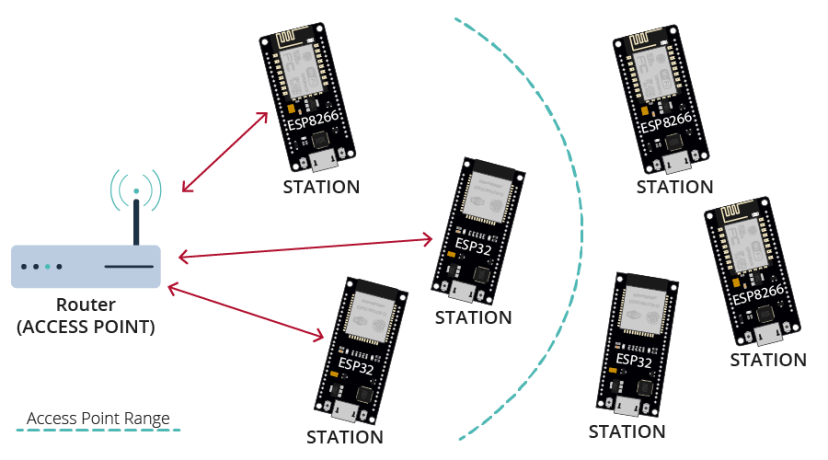
Традиционная архитектура Wi-Fi сети
В традиционной архитектуре Wi-Fi сети один узел (точка доступа — обычно маршрутизатор) подключён ко всем остальным узлам (станциям). Каждый узел может взаимодействовать друг с другом через точку доступа. Однако это ограничено зоной покрытия Wi-Fi точки доступа. Каждая станция должна находиться в зоне действия для прямого подключения к точке доступа. С ESP-MESH такого ограничения нет.
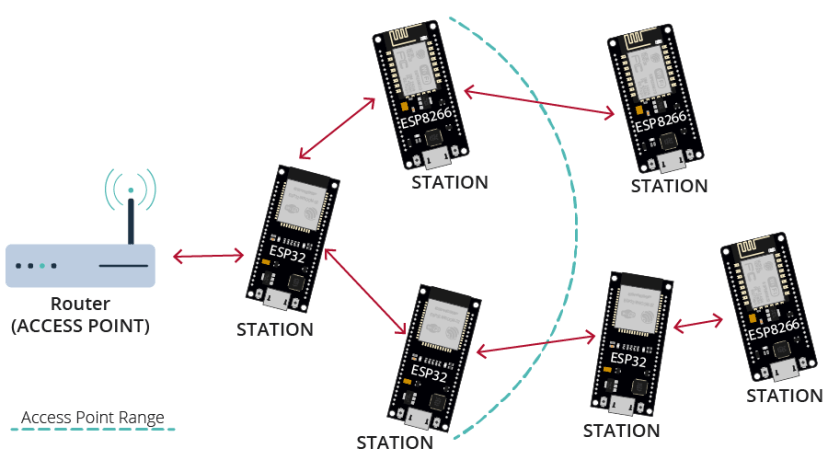
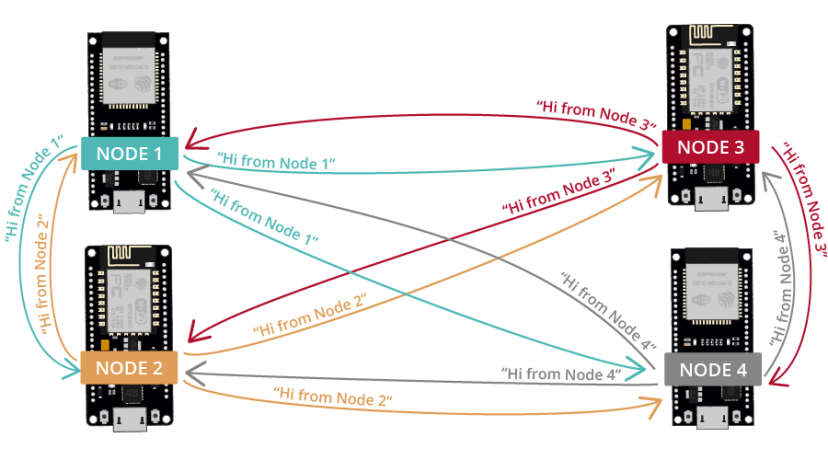
Архитектура сети ESP-MESH
С ESP-MESH узлам не нужно подключаться к центральному узлу. Узлы отвечают за ретрансляцию передач друг друга. Это позволяет множеству устройств распределяться по большой физической территории. Узлы могут самоорганизовываться и динамически взаимодействовать друг с другом, чтобы гарантировать доставку пакета до конечного узла назначения. Если какой-либо узел удаляется из сети, она способна самоорганизоваться для обеспечения доставки пакетов к месту назначения.
Библиотека painlessMesh
Библиотека painlessMesh позволяет легко создать mesh-сеть с платами ESP8266 и/или ESP32.
«painlessMesh — это настоящая ad-hoc сеть, что означает, что не требуется никакого планирования, центрального контроллера или маршрутизатора. Любая система из 1 или более узлов самоорганизуется в полностью функциональную mesh-сеть. Максимальный размер сети ограничен (как мы полагаем) объёмом памяти в куче, который может быть выделен для буфера подключений, и поэтому должен быть весьма большим.» Подробнее о библиотеке painlessMesh.
Установка библиотеки painlessMesh
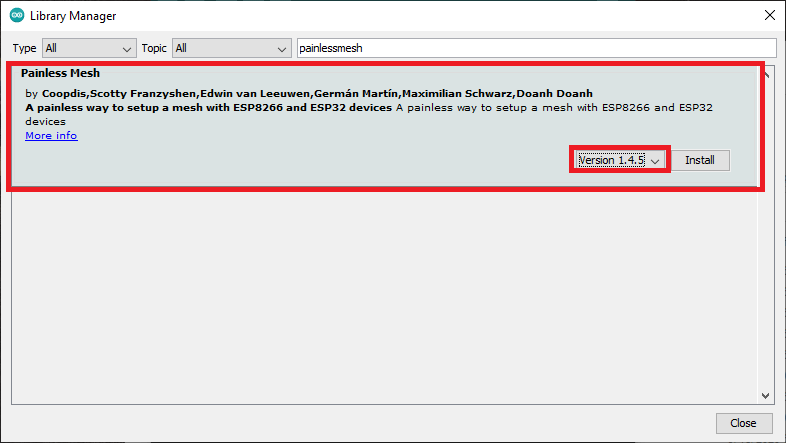
Вы можете установить painlessMesh через менеджер библиотек Arduino. Перейдите в Tools > Manage Libraries. Должен открыться менеджер библиотек.
Найдите «painlessmesh» и установите библиотеку. Мы используем версию 1.4.5.
Эта библиотека нуждается в некоторых дополнительных зависимостях. Должно появиться новое окно с предложением установить недостающие зависимости. Выберите «Install all».
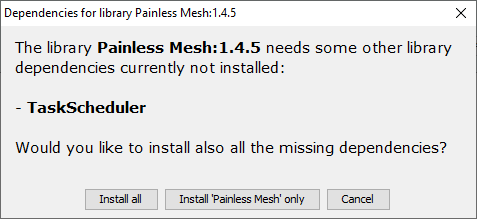
Если это окно не появится, вам нужно установить следующие зависимости вручную:
ArduinoJson (от bblanchon)
ESPAsyncTCP (ESP8266)
AsyncTCP (ESP32)
Если вы используете PlatformIO, добавьте следующие строки в файл platformio.ini для подключения библиотек и изменения скорости монитора.
Для ESP32:
monitor_speed = 115200
lib_deps = painlessmesh/painlessMesh @ ^1.4.5
ArduinoJson
arduinoUnity
TaskScheduler
AsyncTCP
Для ESP8266:
monitor_speed = 115200
lib_deps = painlessmesh/painlessMesh @ ^1.4.5
ArduinoJson
TaskScheduler
ESPAsyncTCP
Базовый пример ESP-MESH (широковещательные сообщения)
Для начала работы с ESP-MESH сначала поэкспериментируем с базовым примером библиотеки. Этот пример создаёт mesh-сеть, в которой все платы рассылают сообщения всем остальным платам.
Мы проверили этот пример на четырёх платах (два ESP32 и два ESP8266). Вы можете добавить или убрать платы. Код совместим как с платами ESP32, так и с ESP8266.
Код – базовый пример библиотеки painlessMesh
Скопируйте следующий код в вашу Arduino IDE (код из примеров библиотеки). Код совместим как с платами ESP32, так и с ESP8266.
Если вы используете ESP32, вам необходимо понизить версию дополнения для плат ESP32 до версии 2.0.X. На данный момент библиотека painlessMesh несовместима с версией 3.X.
/*
Rui Santos
Complete project details at https://RandomNerdTutorials.com/esp-mesh-esp32-esp8266-painlessmesh/
This is a simple example that uses the painlessMesh library: https://github.com/gmag11/painlessMesh/blob/master/examples/basic/basic.ino
*/
#include "painlessMesh.h"
#define MESH_PREFIX "whateverYouLike"
#define MESH_PASSWORD "somethingSneaky"
#define MESH_PORT 5555
Scheduler userScheduler; // to control your personal task
painlessMesh mesh;
// User stub
void sendMessage() ; // Prototype so PlatformIO doesn't complain
Task taskSendMessage( TASK_SECOND * 1 , TASK_FOREVER, &sendMessage );
void sendMessage() {
String msg = "Hi from node1";
msg += mesh.getNodeId();
mesh.sendBroadcast( msg );
taskSendMessage.setInterval( random( TASK_SECOND * 1, TASK_SECOND * 5 ));
}
// Needed for painless library
void receivedCallback( uint32_t from, String &msg ) {
Serial.printf("startHere: Received from %u msg=%s\n", from, msg.c_str());
}
void newConnectionCallback(uint32_t nodeId) {
Serial.printf("--> startHere: New Connection, nodeId = %u\n", nodeId);
}
void changedConnectionCallback() {
Serial.printf("Changed connections\n");
}
void nodeTimeAdjustedCallback(int32_t offset) {
Serial.printf("Adjusted time %u. Offset = %d\n", mesh.getNodeTime(),offset);
}
void setup() {
Serial.begin(115200);
//mesh.setDebugMsgTypes( ERROR | MESH_STATUS | CONNECTION | SYNC | COMMUNICATION | GENERAL | MSG_TYPES | REMOTE ); // all types on
mesh.setDebugMsgTypes( ERROR | STARTUP ); // set before init() so that you can see startup messages
mesh.init( MESH_PREFIX, MESH_PASSWORD, &userScheduler, MESH_PORT );
mesh.onReceive(&receivedCallback);
mesh.onNewConnection(&newConnectionCallback);
mesh.onChangedConnections(&changedConnectionCallback);
mesh.onNodeTimeAdjusted(&nodeTimeAdjustedCallback);
userScheduler.addTask( taskSendMessage );
taskSendMessage.enable();
}
void loop() {
// it will run the user scheduler as well
mesh.update();
}
Перед загрузкой кода вы можете настроить переменные MESH_PREFIX (это как имя MESH-сети) и MESH_PASSWORD (можете установить любое значение).
Затем мы рекомендуем изменить следующую строку для каждой платы, чтобы легко идентифицировать узел, отправивший сообщение. Например, для узла 1 измените сообщение следующим образом:
String msg = "Hi from node 1 ";
Как работает код
Начните с подключения библиотеки painlessMesh.
#include "painlessMesh.h"
Настройки MESH
Затем добавьте настройки mesh-сети. MESH_PREFIX относится к имени mesh-сети. Вы можете изменить его на любое удобное.
#define MESH_PREFIX "whateverYouLike"
MESH_PASSWORD, как следует из названия, — это пароль mesh-сети. Вы можете изменить его на любое удобное.
#define MESH_PASSWORD "somethingSneaky"
Все узлы в mesh-сети должны использовать одинаковые MESH_PREFIX и MESH_PASSWORD.
MESH_PORT относится к TCP-порту, на котором вы хотите запустить mesh-сервер. По умолчанию — 5555.
#define MESH_PORT 5555
Планировщик (Scheduler)
Рекомендуется избегать использования delay() в коде mesh-сети. Для поддержания mesh некоторые задачи должны выполняться в фоновом режиме. Использование delay() остановит выполнение этих задач и может привести к потере стабильности или распаду mesh-сети.
Вместо этого рекомендуется использовать TaskScheduler для запуска ваших задач, который также используется в самой библиотеке painlessMesh.
Следующая строка создаёт новый планировщик с именем userScheduler.
Scheduler userScheduler; // to control your personal task
painlessMesh
Создайте объект painlessMesh с именем mesh для управления mesh-сетью.
Создание задач
Создайте задачу taskSendMessage, отвечающую за вызов функции sendMessage() каждую секунду на протяжении всего времени работы программы.
Task taskSendMessage(TASK_SECOND * 1 , TASK_FOREVER, &sendMessage);
Отправка сообщения в mesh-сеть
Функция sendMessage() отправляет сообщение всем узлам в mesh-сети (широковещательная рассылка).
void sendMessage() {
String msg = "Hi from node 1";
msg += mesh.getNodeId();
mesh.sendBroadcast( msg );
taskSendMessage.setInterval(random(TASK_SECOND * 1, TASK_SECOND * 5));
}
Сообщение содержит текст «Hi from node 1», за которым следует ID чипа платы.
String msg = "Hi from node 1";
msg += mesh.getNodeId();
Для широковещательной отправки сообщения просто используйте метод sendBroadcast() объекта mesh и передайте в качестве аргумента сообщение (msg), которое хотите отправить.
mesh.sendBroadcast(msg);
При каждой отправке нового сообщения код изменяет интервал между сообщениями (от одной до пяти секунд).
taskSendMessage.setInterval(random(TASK_SECOND * 1, TASK_SECOND * 5));
Callback-функции mesh-сети
Далее создаётся несколько callback-функций, которые будут вызываться при возникновении определённых событий в mesh-сети.
Функция receivedCallback() выводит отправителя сообщения (from) и содержание сообщения (msg.c_str()).
void receivedCallback( uint32_t from, String &msg ) {
Serial.printf("startHere: Received from %u msg=%s\n", from, msg.c_str());
}
Функция newConnectionCallback() выполняется каждый раз, когда новый узел присоединяется к сети. Эта функция просто выводит ID чипа нового узла. Вы можете модифицировать функцию для выполнения любой другой задачи.
void newConnectionCallback(uint32_t nodeId) {
Serial.printf("--> startHere: New Connection, nodeId = %u\n", nodeId);
}
Функция changedConnectionCallback() выполняется каждый раз, когда соединение в сети изменяется (когда узел присоединяется к сети или покидает её).
void changedConnectionCallback() {
Serial.printf("Changed connections\n");
}
Функция nodeTimeAdjustedCallback() выполняется, когда сеть корректирует время для синхронизации всех узлов. Она выводит смещение.
void nodeTimeAdjustedCallback(int32_t offset) {
Serial.printf("Adjusted time %u. Offset = %d\n", mesh.getNodeTime(),offset);
}
setup()
В setup() инициализируйте монитор последовательного порта.
void setup() {
Serial.begin(115200);
Выберите нужные типы отладочных сообщений:
//mesh.setDebugMsgTypes( ERROR | MESH_STATUS | CONNECTION | SYNC | COMMUNICATION | GENERAL | MSG_TYPES | REMOTE ); // all types on
mesh.setDebugMsgTypes( ERROR | STARTUP ); // set before init() so that you can see startup messages
Инициализируйте mesh с ранее определёнными настройками.
mesh.init(MESH_PREFIX, MESH_PASSWORD, &userScheduler, MESH_PORT);
Назначьте все callback-функции соответствующим событиям.
mesh.onReceive(&receivedCallback);
mesh.onNewConnection(&newConnectionCallback);
mesh.onChangedConnections(&changedConnectionCallback);
mesh.onNodeTimeAdjusted(&nodeTimeAdjustedCallback);
Наконец, добавьте функцию taskSendMessage в userScheduler. Планировщик отвечает за управление и запуск задач в нужное время.
userScheduler.addTask(taskSendMessage);
Далее включите taskSendMessage, чтобы программа начала отправлять сообщения в mesh-сеть.
taskSendMessage.enable();
Для поддержания работы mesh-сети добавьте mesh.update() в loop().
void loop() {
// it will run the user scheduler as well
mesh.update();
}
Демонстрация
Загрузите приведённый код на все ваши платы. Не забудьте изменить сообщение для лёгкой идентификации узла-отправителя.
Подключив платы к компьютеру, откройте последовательное соединение с каждой платой. Вы можете использовать Serial Monitor или программу типа PuTTY и открыть несколько окон для всех плат.
Вы должны увидеть, что все платы получают сообщения друг от друга. Например, вот сообщения, полученные Узлом 1. Он получает сообщения от Узла 2, 3 и 4.
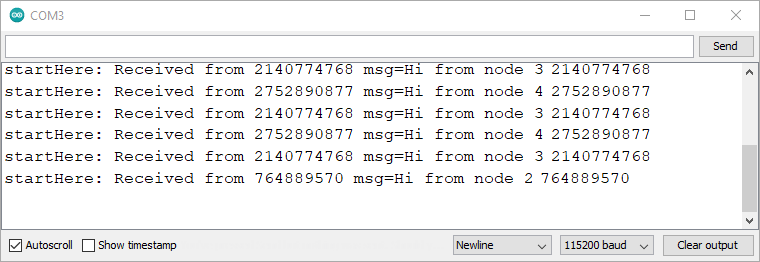
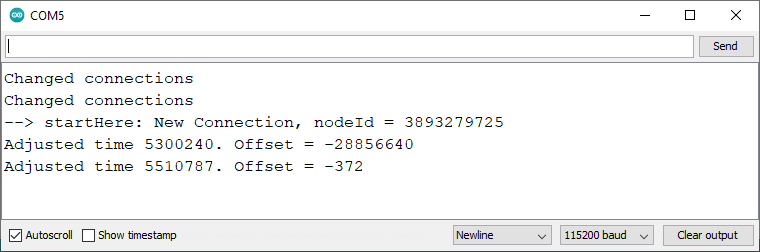
Вы также должны увидеть другие сообщения при изменениях в mesh-сети: когда плата покидает сеть или присоединяется к ней.
Обмен показаниями датчиков через ESP-MESH
В следующем примере мы будем обмениваться показаниями датчиков между 4 платами (вы можете использовать другое количество плат). Каждая плата получает показания от остальных плат.
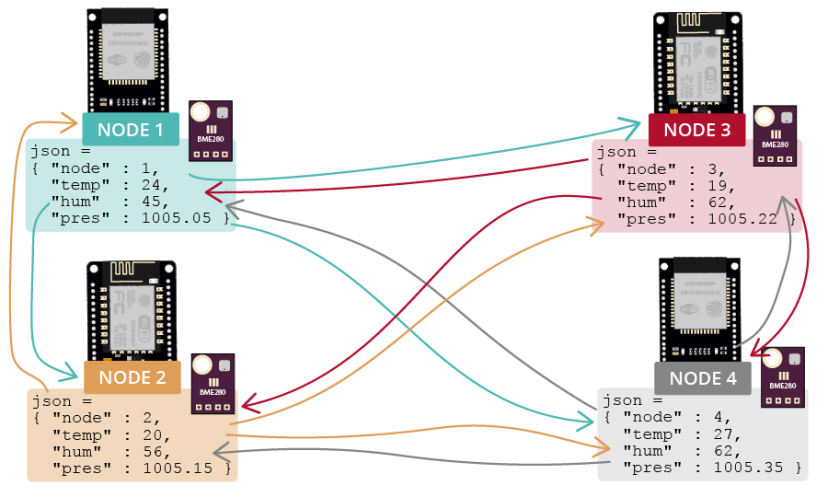
В качестве примера мы будем обмениваться показаниями датчика BME280, но вы можете использовать любой другой датчик.
Необходимые компоненты
Вот компоненты, необходимые для этого примера:
4x BME280
Библиотека Arduino_JSON
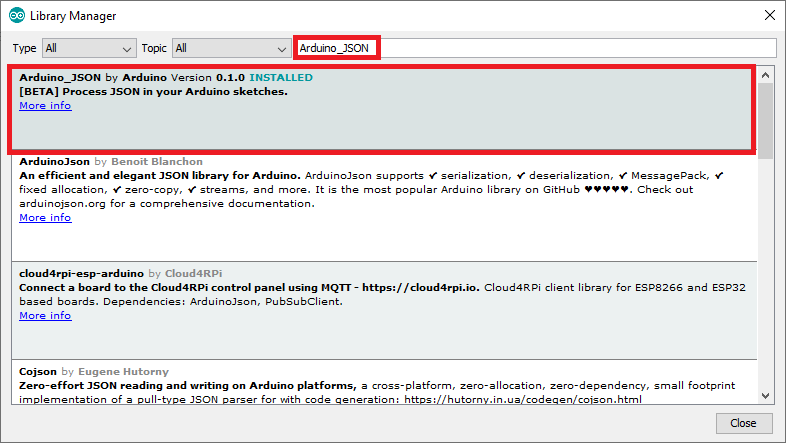
В этом примере мы будем обмениваться показаниями датчиков в формате JSON. Для упрощения работы с JSON-переменными мы будем использовать библиотеку Arduino_JSON.
Вы можете установить эту библиотеку через менеджер библиотек Arduino IDE. Просто перейдите в Sketch > Include Library > Manage Libraries и найдите библиотеку по имени:
Если вы используете VS Code с PlatformIO, включите библиотеки в файл platformio.ini следующим образом:
ESP32
monitor_speed = 115200
lib_deps = painlessmesh/painlessMesh @ ^1.4.5
ArduinoJson
arduinoUnity
AsyncTCP
TaskScheduler
adafruit/Adafruit Unified Sensor @ ^1.1.4
adafruit/Adafruit BME280 Library @ ^2.1.2
arduino-libraries/Arduino_JSON @ ^0.1.0
ESP8266
monitor_speed = 115200
lib_deps = painlessmesh/painlessMesh @ ^1.4.5
ArduinoJson
TaskScheduler
ESPAsyncTCP
adafruit/Adafruit Unified Sensor @ ^1.1.4
adafruit/Adafruit BME280 Library @ ^2.1.2
arduino-libraries/Arduino_JSON @ ^0.1.0
Схема подключения
Подключите датчик BME280 к стандартным пинам I2C ESP32 или ESP8266, как показано на следующих схемах.
ESP32
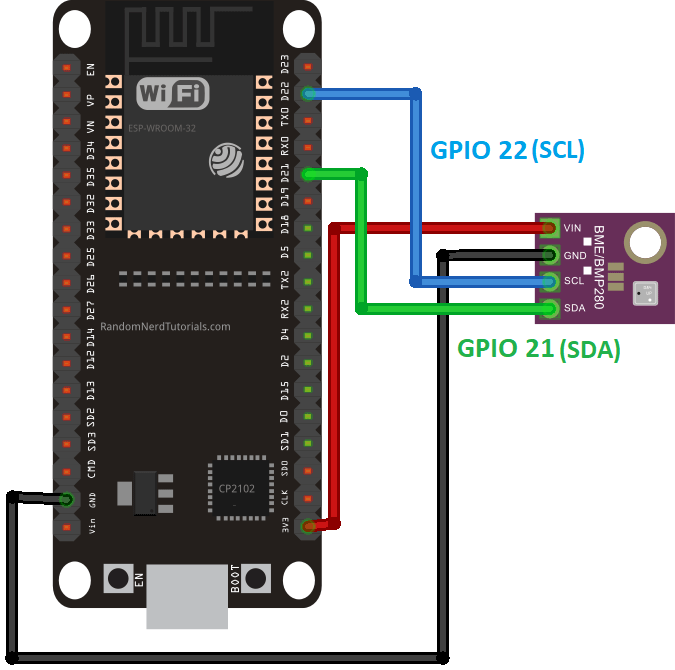
Рекомендуемое чтение: ESP32 с BME280 с использованием Arduino IDE (давление, температура, влажность)
ESP8266 NodeMCU
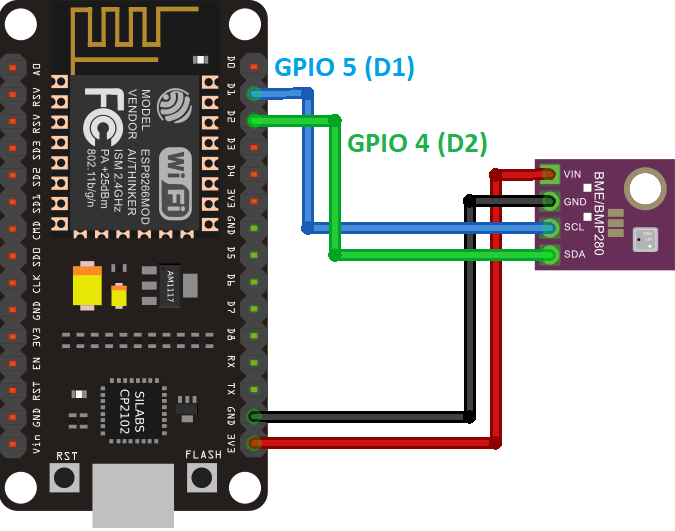
Рекомендуемое чтение: ESP8266 с BME280 с использованием Arduino IDE (давление, температура, влажность)
Код – ESP-MESH широковещательная передача показаний датчиков
Загрузите следующий код на каждую из ваших плат. Этот код считывает и транслирует текущие показания температуры, влажности и давления всем платам в mesh-сети. Показания отправляются в виде JSON-строки, которая также содержит номер узла для идентификации платы-отправителя.
/*
Rui Santos
Complete project details at https://RandomNerdTutorials.com/esp-mesh-esp32-esp8266-painlessmesh/
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files.
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
*/
#include <Adafruit_Sensor.h>
#include <Adafruit_BME280.h>
#include "painlessMesh.h"
#include <Arduino_JSON.h>
// MESH Details
#define MESH_PREFIX "RNTMESH" //name for your MESH
#define MESH_PASSWORD "MESHpassword" //password for your MESH
#define MESH_PORT 5555 //default port
//BME object on the default I2C pins
Adafruit_BME280 bme;
//Number for this node
int nodeNumber = 2;
//String to send to other nodes with sensor readings
String readings;
Scheduler userScheduler; // to control your personal task
painlessMesh mesh;
// User stub
void sendMessage() ; // Prototype so PlatformIO doesn't complain
String getReadings(); // Prototype for sending sensor readings
//Create tasks: to send messages and get readings;
Task taskSendMessage(TASK_SECOND * 5 , TASK_FOREVER, &sendMessage);
String getReadings () {
JSONVar jsonReadings;
jsonReadings["node"] = nodeNumber;
jsonReadings["temp"] = bme.readTemperature();
jsonReadings["hum"] = bme.readHumidity();
jsonReadings["pres"] = bme.readPressure()/100.0F;
readings = JSON.stringify(jsonReadings);
return readings;
}
void sendMessage () {
String msg = getReadings();
mesh.sendBroadcast(msg);
}
//Init BME280
void initBME(){
if (!bme.begin(0x76)) {
Serial.println("Could not find a valid BME280 sensor, check wiring!");
while (1);
}
}
// Needed for painless library
void receivedCallback( uint32_t from, String &msg ) {
Serial.printf("Received from %u msg=%s\n", from, msg.c_str());
JSONVar myObject = JSON.parse(msg.c_str());
int node = myObject["node"];
double temp = myObject["temp"];
double hum = myObject["hum"];
double pres = myObject["pres"];
Serial.print("Node: ");
Serial.println(node);
Serial.print("Temperature: ");
Serial.print(temp);
Serial.println(" C");
Serial.print("Humidity: ");
Serial.print(hum);
Serial.println(" %");
Serial.print("Pressure: ");
Serial.print(pres);
Serial.println(" hpa");
}
void newConnectionCallback(uint32_t nodeId) {
Serial.printf("New Connection, nodeId = %u\n", nodeId);
}
void changedConnectionCallback() {
Serial.printf("Changed connections\n");
}
void nodeTimeAdjustedCallback(int32_t offset) {
Serial.printf("Adjusted time %u. Offset = %d\n", mesh.getNodeTime(),offset);
}
void setup() {
Serial.begin(115200);
initBME();
//mesh.setDebugMsgTypes( ERROR | MESH_STATUS | CONNECTION | SYNC | COMMUNICATION | GENERAL | MSG_TYPES | REMOTE ); // all types on
mesh.setDebugMsgTypes( ERROR | STARTUP ); // set before init() so that you can see startup messages
mesh.init( MESH_PREFIX, MESH_PASSWORD, &userScheduler, MESH_PORT );
mesh.onReceive(&receivedCallback);
mesh.onNewConnection(&newConnectionCallback);
mesh.onChangedConnections(&changedConnectionCallback);
mesh.onNodeTimeAdjusted(&nodeTimeAdjustedCallback);
userScheduler.addTask(taskSendMessage);
taskSendMessage.enable();
}
void loop() {
// it will run the user scheduler as well
mesh.update();
}
Код совместим как с платами ESP32, так и с ESP8266.
Как работает код
Продолжайте чтение этого раздела, чтобы узнать, как работает код.
Библиотеки
Начните с подключения необходимых библиотек: Adafruit_Sensor и Adafruit_BME280 для работы с датчиком BME280; библиотека painlessMesh для управления mesh-сетью и Arduino_JSON для простого создания и обработки JSON-строк.
#include <Adafruit_Sensor.h>
#include <Adafruit_BME280.h>
#include "painlessMesh.h"
#include <Arduino_JSON.h>
Настройки mesh-сети
Укажите настройки mesh-сети в следующих строках.
#define MESH_PREFIX "RNTMESH" //name for your MESH
#define MESH_PASSWORD "MESHpassword" //password for your MESH
#define MESH_PORT 5555 //default port
MESH_PREFIX относится к имени mesh-сети. Вы можете изменить его на любое удобное. MESH_PASSWORD, как следует из названия, — это пароль mesh-сети. Вы можете изменить его на любое удобное. Все узлы в mesh-сети должны использовать одинаковые MESH_PREFIX и MESH_PASSWORD.
MESH_PORT относится к TCP-порту, на котором вы хотите запустить mesh-сервер. По умолчанию — 5555.
BME280
Создайте объект Adafruit_BME280 с именем bme на стандартных пинах ESP32 или ESP8266.
Adafruit_BME280 bme;
В переменную nodeNumber внесите номер узла для вашей платы. Для каждой платы должен быть свой уникальный номер.
int nodeNumber = 2;
Переменная readings будет использоваться для сохранения показаний, отправляемых другим платам.
String readings;
Планировщик (Scheduler)
Следующая строка создаёт новый планировщик с именем userScheduler.
Scheduler userScheduler; // to control your personal task
painlessMesh
Создайте объект painlessMesh с именем mesh для управления mesh-сетью.
Создание задач
Создайте задачу taskSendMessage, отвечающую за вызов функции sendMessage() каждые пять секунд на протяжении всего времени работы программы.
Task taskSendMessage(TASK_SECOND * 5 , TASK_FOREVER, &sendMessage);
getReadings()
Функция getReadings() получает показания температуры, влажности и давления от датчика BME280 и объединяет всю информацию, включая номер узла, в JSON-переменную jsonReadings.
JSONVar jsonReadings;
jsonReadings["node"] = nodeNumber;
jsonReadings["temp"] = bme.readTemperature();
jsonReadings["hum"] = bme.readHumidity();
jsonReadings["pres"] = bme.readPressure()/100.0F;
Следующая строка показывает структуру переменной jsonReadings с произвольными значениями.
{
"node":2,
"temperature":24.51,
"humidity":52.01,
"pressure":1005.21
}
Переменная jsonReadings затем преобразуется в JSON-строку с помощью метода stringify() и сохраняется в переменной readings.
readings = JSON.stringify(jsonReadings);
Эта переменная затем возвращается функцией.
return readings;
Отправка сообщения в mesh-сеть
Функция sendMessage() отправляет JSON-строку с показаниями и номером узла (getReadings()) всем узлам сети (широковещательная рассылка).
void sendMessage () {
String msg = getReadings();
mesh.sendBroadcast(msg);
}
Инициализация датчика BME280
Функция initBME() инициализирует датчик BME280.
void initBME(){
if (!bme.begin(0x76)) {
Serial.println("Could not find a valid BME280 sensor, check wiring!");
while (1);
}
}
Callback-функции mesh-сети
Далее создаётся несколько callback-функций, которые будут вызываться при возникновении определённых событий в mesh-сети.
Функция receivedCallback() выводит отправителя сообщения (from) и содержание сообщения (msg.c_str()).
void receivedCallback( uint32_t from, String &msg ) {
Serial.printf("startHere: Received from %u msg=%s\n", from, msg.c_str());
Сообщение приходит в формате JSON, поэтому мы можем получить доступ к переменным следующим образом:
JSONVar myObject = JSON.parse(msg.c_str());
int node = myObject["node"];
double temp = myObject["temp"];
double hum = myObject["hum"];
double pres = myObject["pres"];
Наконец, выведите всю информацию в Serial Monitor.
Serial.print("Node: ");
Serial.println(node);
Serial.print("Temperature: ");
Serial.print(temp);
Serial.println(" C");
Serial.print("Humidity: ");
Serial.print(hum);
Serial.println(" %");
Serial.print("Pressure: ");
Serial.print(pres);
Serial.println(" hpa");
Функция newConnectionCallback() выполняется каждый раз, когда новый узел присоединяется к сети. Эта функция просто выводит ID чипа нового узла. Вы можете модифицировать функцию для выполнения любой другой задачи.
void newConnectionCallback(uint32_t nodeId) {
Serial.printf("--> startHere: New Connection, nodeId = %u\n", nodeId);
}
Функция changedConnectionCallback() выполняется каждый раз, когда соединение в сети изменяется (когда узел присоединяется к сети или покидает её).
void changedConnectionCallback() {
Serial.printf("Changed connections\n");
}
Функция nodeTimeAdjustedCallback() выполняется, когда сеть корректирует время для синхронизации всех узлов. Она выводит смещение.
void nodeTimeAdjustedCallback(int32_t offset) {
Serial.printf("Adjusted time %u. Offset = %d\n", mesh.getNodeTime(),offset);
}
setup()
В setup() инициализируйте монитор последовательного порта.
void setup() {
Serial.begin(115200);
Вызовите функцию initBME() для инициализации датчика BME280.
initBME();
Выберите нужные типы отладочных сообщений:
//mesh.setDebugMsgTypes( ERROR | MESH_STATUS | CONNECTION | SYNC | COMMUNICATION | GENERAL | MSG_TYPES | REMOTE ); // all types on
mesh.setDebugMsgTypes( ERROR | STARTUP ); // set before init() so that you can see startup messages
Инициализируйте mesh с ранее определёнными настройками.
mesh.init(MESH_PREFIX, MESH_PASSWORD, &userScheduler, MESH_PORT);
Назначьте все callback-функции соответствующим событиям.
mesh.onReceive(&receivedCallback);
mesh.onNewConnection(&newConnectionCallback);
mesh.onChangedConnections(&changedConnectionCallback);
mesh.onNodeTimeAdjusted(&nodeTimeAdjustedCallback);
Наконец, добавьте функцию taskSendMessage в userScheduler. Планировщик отвечает за управление и запуск задач в нужное время.
userScheduler.addTask(taskSendMessage);
Далее включите taskSendMessage, чтобы программа начала отправлять сообщения в mesh-сеть.
taskSendMessage.enable();
Для поддержания работы mesh-сети добавьте mesh.update() в loop().
void loop() {
// it will run the user scheduler as well
mesh.update();
}
Демонстрация
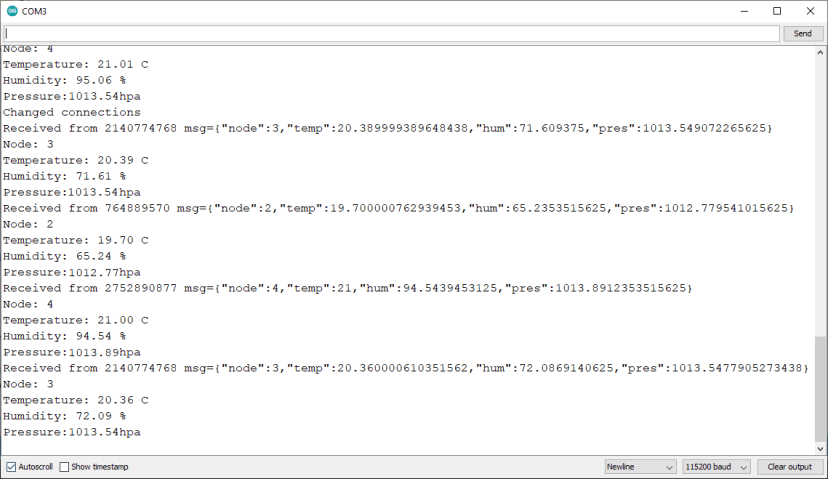
После загрузки кода на все ваши платы (каждая плата с отдельным номером узла), вы должны увидеть, что каждая плата получает сообщения от остальных плат.
На следующем снимке экрана показаны сообщения, полученные узлом 1. Он получает показания датчиков от узлов 2, 3 и 4.
Заключение
Мы надеемся, что вам понравилось это краткое введение в сетевой протокол ESP-MESH. Вы можете ознакомиться с библиотекой painlessMesh для получения дополнительных примеров.
Вам также могут быть интересны следующие статьи:
Узнайте больше об ESP32 и ESP8266 с нашими ресурсами:
Спасибо за чтение.
Источник: ESP-MESH with ESP32 and ESP8266: Getting Started (painlessMesh library)