Управление шаговым двигателем с помощью джойстика на Arduino
1. Введение
Шаговые двигатели широко используются в различных проектах, требующих точного управления движением. В этом учебном тексте мы рассмотрим, как управлять шаговым двигателем с помощью джойстика, используя платформу Arduino. Проект включает подключение и программирование джойстика и шагового двигателя, а также создание простого интерфейса для управления двигателем.
2. Необходимые компоненты
Arduino UNO
Шаговый двигатель 28BYJ-48 с платой управления
Джойстик
Соединительные провода и макетная плата
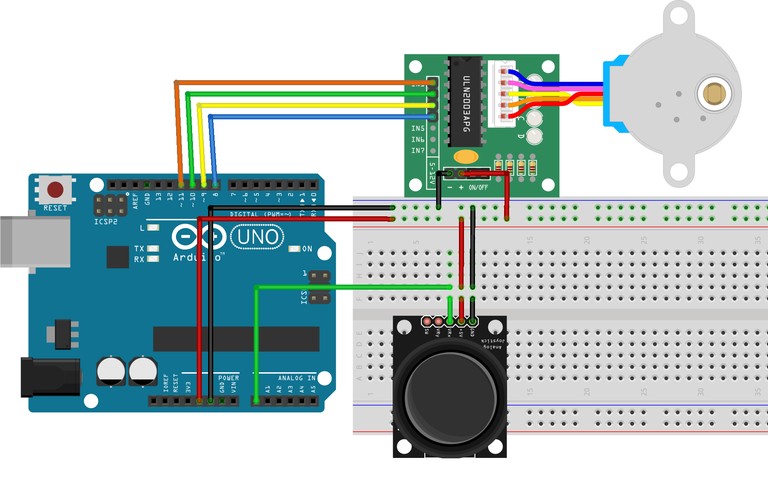
3. Подключение компонентов
Шаговый двигатель:
Подключается к драйверу ULN2003.
Драйвер управляется через цифровые пины 8, 9, 10, 11 на Arduino.
Джойстик:
Ось X (или выход потенциометра) → A0 Arduino
VCC → 5V
GND → GND
4. Код программы
#include <Stepper.h> // включить библиотеку шаговых двигателей Arduino
#define STEPS 32 // количество шагов на один оборот (внутреннее значение для 28BYJ-48)
#define IN1 11
#define IN2 10
#define IN3 9
#define IN4 8
#define joystick A0 // аналоговый пин для джойстика
Stepper stepper(STEPS, IN4, IN2, IN3, IN1); // инициализация двигателя
void setup() {
// ничего не требуется
}
void loop() {
int val = analogRead(joystick); // считывание значения с джойстика
if ((val > 500) && (val < 523)) {
// остановка двигателя при нейтральном положении
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
} else {
// движение вправо
while (val >= 523) {
int speed_ = map(val, 523, 1023, 5, 500);
stepper.setSpeed(speed_);
stepper.step(1);
val = analogRead(joystick);
}
// движение влево
while (val <= 500) {
int speed_ = map(val, 500, 0, 5, 500);
stepper.setSpeed(speed_);
stepper.step(-1);
val = analogRead(joystick);
}
}
}
5. Заключение
Этот проект демонстрирует, как легко можно управлять шаговым двигателем с помощью джойстика и платформы Arduino. Он является отличной базой для создания более сложных систем управления движением, таких как роботы, механизмы точной подачи или поворотные платформы.
Проект особенно полезен для изучения:
Принципов работы шаговых двигателей
Использования аналогового ввода Arduino
Создания пользовательского интерфейса управления